 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOTORRA: COntext-aware Testbed fOR Robotic Applications
Jan 19, 2021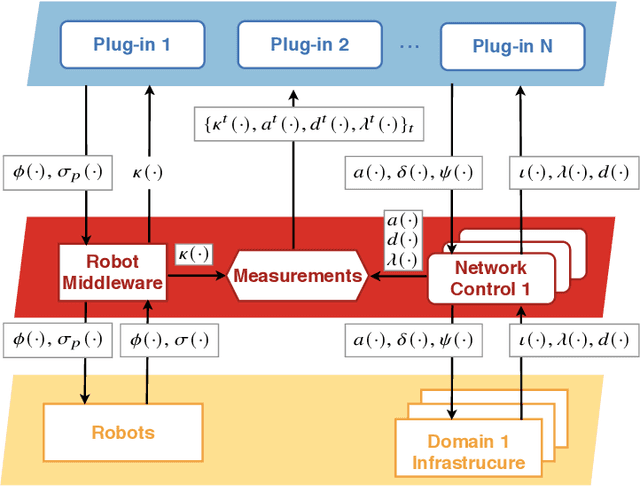
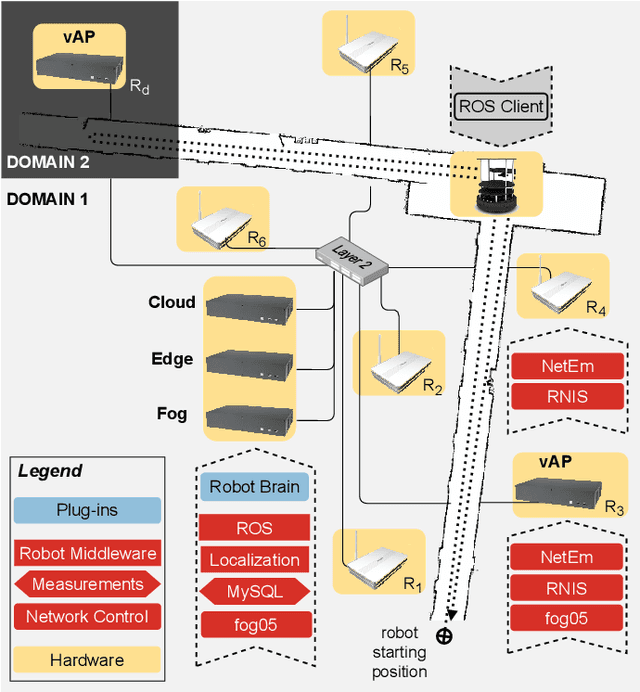
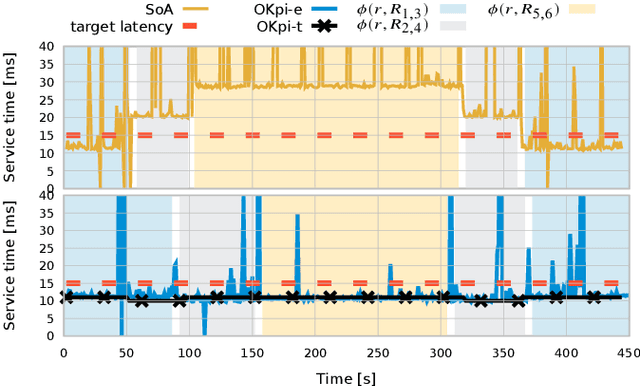
Edge & Fog computing have received considerable attention as promising candidates for the evolution of robotic systems. In this letter, we propose COTORRA, an Edge & Fog driven robotic testbed that combines context information with robot sensor data to validate innovative concepts for robotic systems prior to being applied in a production environment. In lab/university, we established COTORRA as an easy applicable and modular testbed on top of heterogeneous network infrastructure. COTORRA is open for pluggable robotic applications. To verify its feasibility and assess its performance, we ran set of experiments that show how autonomous navigation applications can achieve target latencies bellow 15ms or perform an inter-domain (DLT) federation within 19 seconds.
DLT federation for Edge robotics
Oct 05, 2020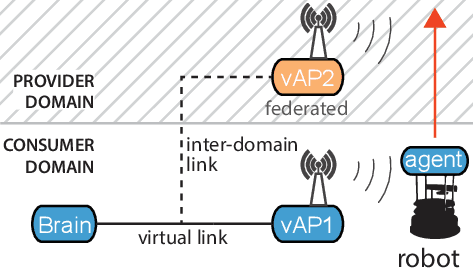
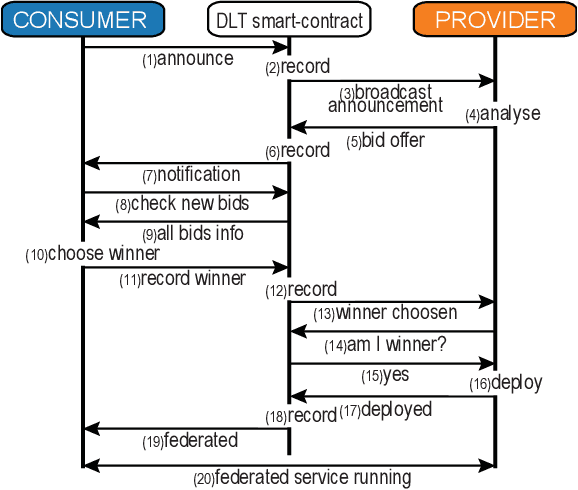
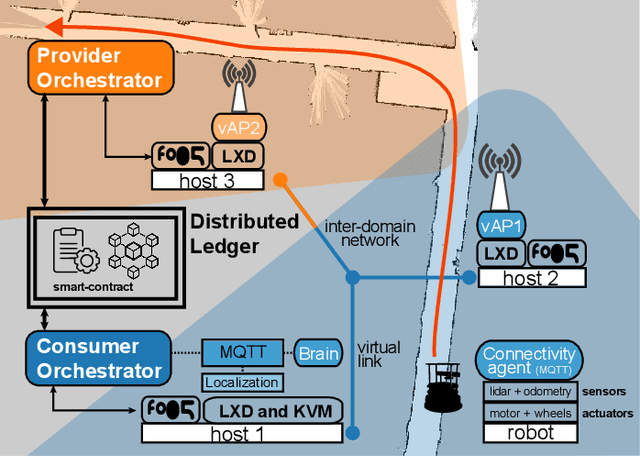
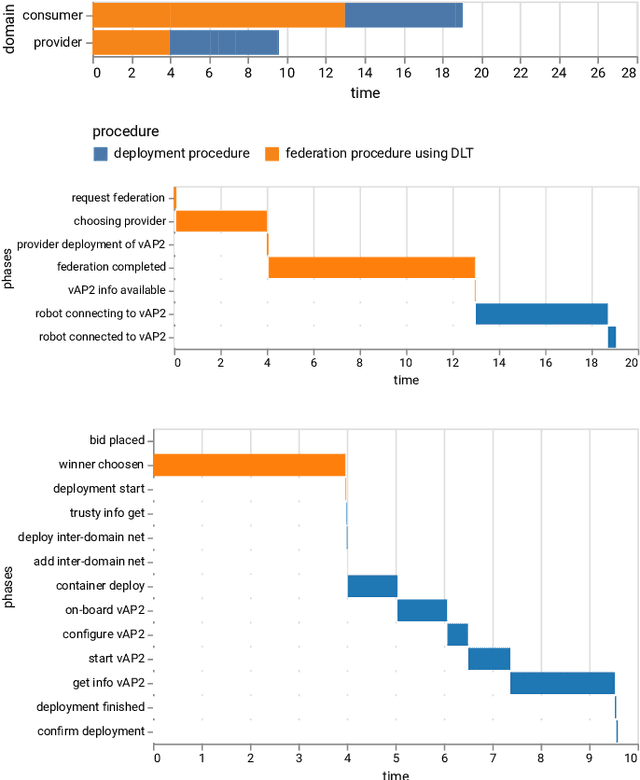
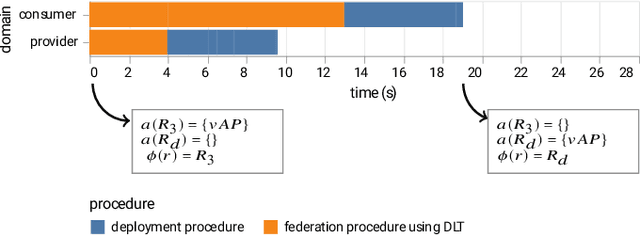
The concept of federation in 5G and NFV networks aims to provide orchestration of services across multiple administrative domains. Edge robotics, as a field of robotics, implements the robot control on the network edge by relying on low-latency and reliable access connectivity. In this paper, we propose a solution that enables Edge robotics service to expand its service footprint or access coverage over multiple administrative domains. We propose application of Distributed ledger technologies (DLTs) for the federation procedures to enable private, secure and trusty interactions between undisclosed administrative domains. The solution is applied on a real-case Edge robotics experimental scenario. The results show that it takes around 19 seconds to deploy & federate a Edge robotics service in an external/anonymous domain without any service down-time.