 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOTORRA: COntext-aware Testbed fOR Robotic Applications
Paper and Code
Jan 19, 2021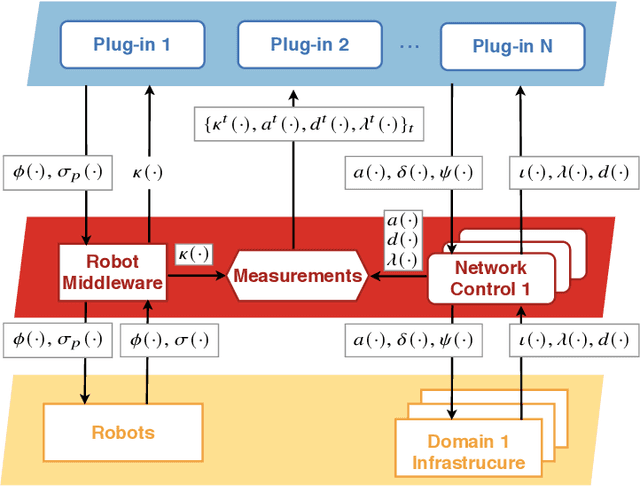
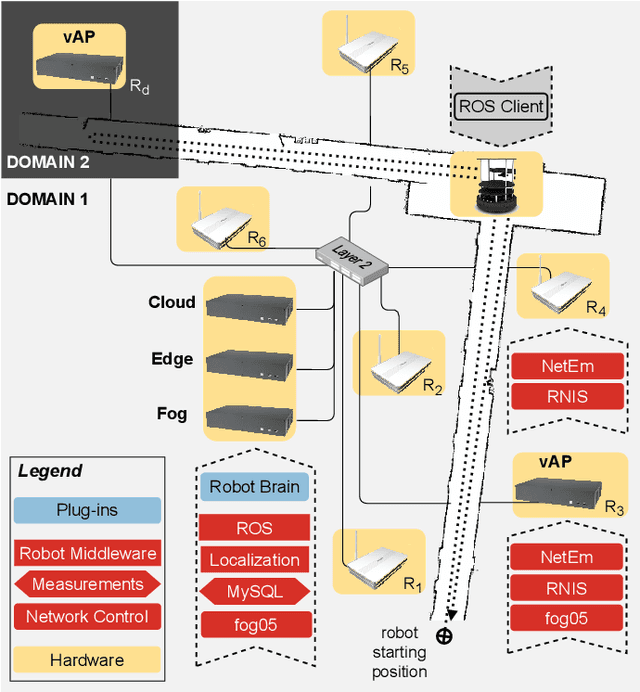
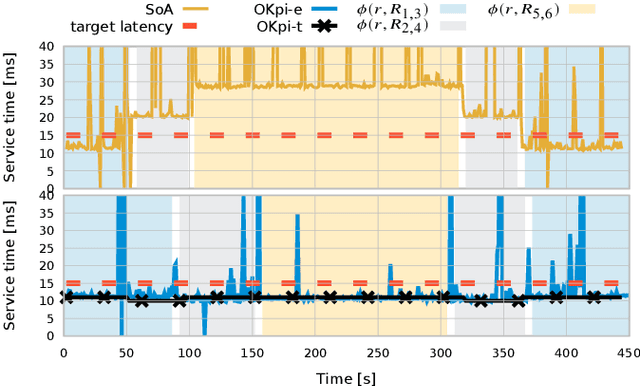
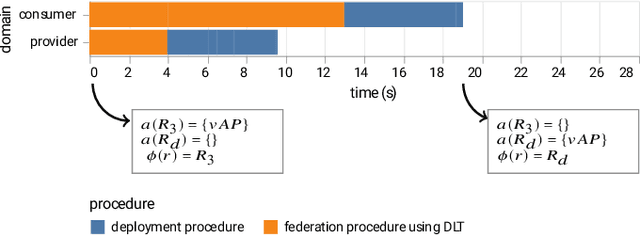
Edge & Fog computing have received considerable attention as promising candidates for the evolution of robotic systems. In this letter, we propose COTORRA, an Edge & Fog driven robotic testbed that combines context information with robot sensor data to validate innovative concepts for robotic systems prior to being applied in a production environment. In lab/university, we established COTORRA as an easy applicable and modular testbed on top of heterogeneous network infrastructure. COTORRA is open for pluggable robotic applications. To verify its feasibility and assess its performance, we ran set of experiments that show how autonomous navigation applications can achieve target latencies bellow 15ms or perform an inter-domain (DLT) federation within 19 seconds.