 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIA: Symbolic Interpretability for Anticipatory Deep Reinforcement Learning in Network Control
Jan 29, 2026Deep reinforcement learning (DRL) promises adaptive control for future mobile networks but conventional agents remain reactive: they act on past and current measurements and cannot leverage short-term forecasts of exogenous KPIs such as bandwidth. Augmenting agents with predictions can overcome this temporal myopia, yet uptake in networking is scarce because forecast-aware agents act as closed-boxes; operators cannot tell whether predictions guide decisions or justify the added complexity. We propose SIA, the first interpreter that exposes in real time how forecast-augmented DRL agents operate. SIA fuses Symbolic AI abstractions with per-KPI Knowledge Graphs to produce explanations, and includes a new Influence Score metric. SIA achieves sub-millisecond speed, over 200x faster than existing XAI methods. We evaluate SIA on three diverse networking use cases, uncovering hidden issues, including temporal misalignment in forecast integration and reward-design biases that trigger counter-productive policies. These insights enable targeted fixes: a redesigned agent achieves a 9% higher average bitrate in video streaming, and SIA's online Action-Refinement module improves RAN-slicing reward by 25% without retraining. By making anticipatory DRL transparent and tunable, SIA lowers the barrier to proactive control in next-generation mobile networks.
SymbXRL: Symbolic Explainable Deep Reinforcement Learning for Mobile Networks
Jan 29, 2026The operation of future 6th-generation (6G) mobile networks will increasingly rely on the ability of deep reinforcement learning (DRL) to optimize network decisions in real-time. DRL yields demonstrated efficacy in various resource allocation problems, such as joint decisions on user scheduling and antenna allocation or simultaneous control of computing resources and modulation. However, trained DRL agents are closed-boxes and inherently difficult to explain, which hinders their adoption in production settings. In this paper, we make a step towards removing this critical barrier by presenting SymbXRL, a novel technique for explainable reinforcement learning (XRL) that synthesizes human-interpretable explanations for DRL agents. SymbXRL leverages symbolic AI to produce explanations where key concepts and their relationships are described via intuitive symbols and rules; coupling such a representation with logical reasoning exposes the decision process of DRL agents and offers more comprehensible descriptions of their behaviors compared to existing approaches. We validate SymbXRL in practical network management use cases supported by DRL, proving that it not only improves the semantics of the explanations but also paves the way for explicit agent control: for instance, it enables intent-based programmatic action steering that improves by 12% the median cumulative reward over a pure DRL solution.
* 10 pages, 9 figures, published in IEEE INFOCOM 2025
waveSLAM: Empowering Accurate Indoor Mapping Using Off-the-Shelf Millimeter-wave Self-sensing
Dec 12, 2023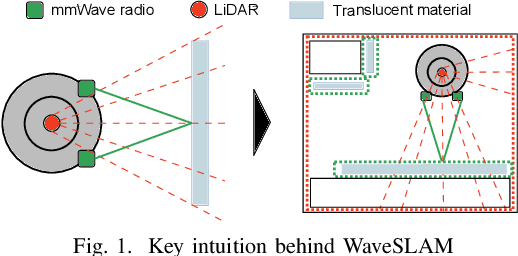

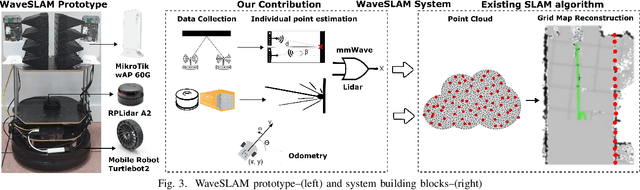

This paper presents the design, implementation and evaluation of waveSLAM, a low-cost mobile robot system that uses the millimetre wave (mmWave) communication devices to enhance the indoor mapping process targeting environments with reduced visibility or glass/mirror walls. A unique feature of waveSLAM is that it only leverages existing Commercial-Off-The-Shelf (COTS) hardware (Lidar and mmWave radios) that are mounted on mobile robots to improve the accurate indoor mapping achieved with optical sensors. The key intuition behind the waveSLAM design is that while the mobile robots moves freely, the mmWave radios can periodically exchange angle and distance estimates between themselves (self-sensing) by bouncing the signal from the environment, thus enabling accurate estimates of the target object/material surface. Our experiments verify that waveSLAM can archive cm-level accuracy with errors below 22 cm and 20deg in angle orientation which is compatible with Lidar when building indoor maps.