 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Switching Technologies for Reflective and Transmissive RISs at Sub-THz Frequencies
Apr 28, 2025For the upcoming 6G wireless networks, reconfigurable intelligent surfaces are an essential technology, enabling dynamic beamforming and signal manipulation in both reflective and transmissive modes. It is expected to utilize frequency bands in the millimeter-wave and THz, which presents unique opportunities but also significant challenges. The selection of switching technologies that can support high-frequency operation with minimal loss and high efficiency is particularly complex. In this work, we demonstrate the potential of advanced components such as Schottky diodes, memristor switches, liquid metal-based switches, phase change materials, and RF-SOI technology in RIS designs as an alternative to overcome limitations inherent in traditional technologies in D-band (110-170 GHz).
Empirical Validation of the Impedance-Based RIS Channel Model in an Indoor Scattering Environment
Dec 01, 2023Ensuring the precision of channel modeling plays a pivotal role in the development of wireless communication systems, and this requirement remains a persistent challenge within the realm of networks supported by Reconfigurable Intelligent Surfaces (RIS). Achieving a comprehensive and reliable understanding of channel behavior in RIS-aided networks is an ongoing and complex issue that demands further exploration. In this paper, we empirically validate a recently-proposed impedance-based RIS channel model that accounts for the mutual coupling at the antenna array and precisely models the presence of scattering objects within the environment as a discrete array of loaded dipoles. To this end, we exploit real-life channel measurements collected in an office environment to demonstrate the validity of such a model and its applicability in a practical scenario. Finally, we provide numerical results demonstrating that designing the RIS configuration based upon such model leads to superior performance as compared to reference schemes.
Automatic Mapping of the Indoor World with Personal Radars
Oct 28, 2019

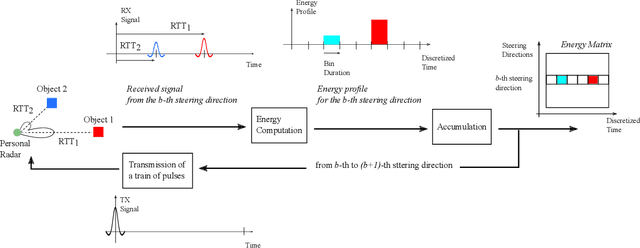
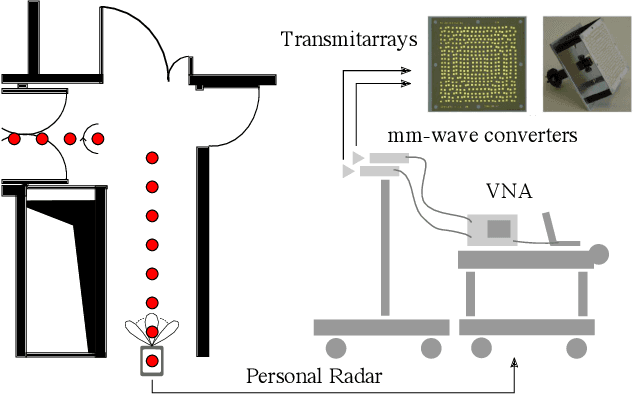
Digital maps will revolutionize our experience of perceiving and navigating indoor environments. While today we rely only on the representation of the outdoors, the mapping of indoors is mainly a part of the traditional SLAM problem where robots discover the surrounding and perform self-localization. Nonetheless, robot deployment prevents from a large diffusion and fast mapping of indoors and, further, they are usually equipped with laser and vision technology that fail in scarce visibility conditions. To this end, a possible solution is to turn future personal devices into personal radars as a milestone towards the automatic generation of indoor maps using massive array technology at millimeter-waves, already in place for communications. In this application-oriented paper, we will describe the main achievements attained so far to develop the personal radar concept, using ad-hoc collected experimental data, and by discussing possible future directions of investigation.