 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration-Agnostic Zero-Energy Devices for Sustainable Connectivity, Sensing, and Localization
Nov 12, 2025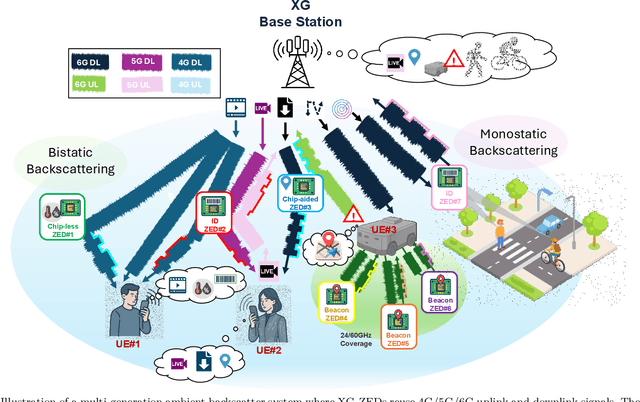
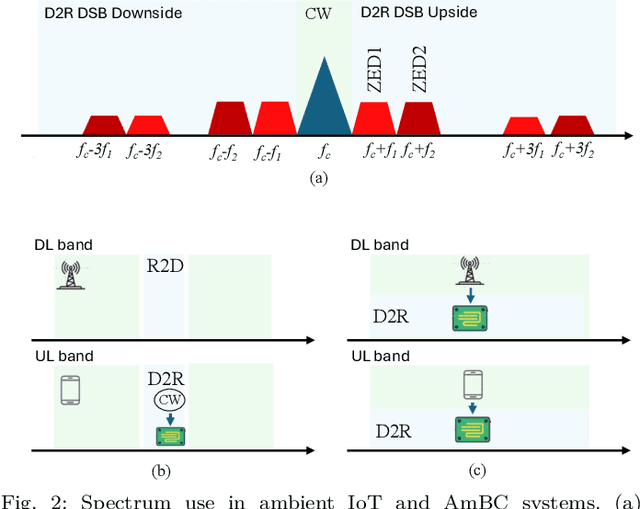
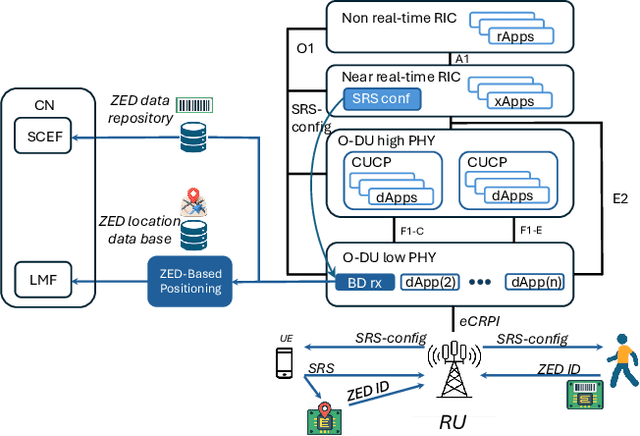
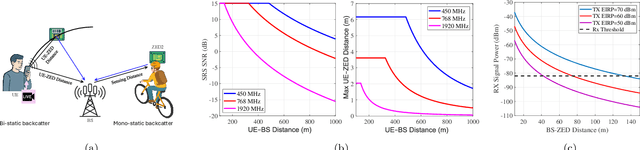
The massive scale of Internet of Things (IoT) connectivity expected in 6G networks raises unprecedented challenges in energy use, battery waste, and lifecycle sustainability. Current cellular IoT solutions remain bound to the lifetime of underlying network generations and rely on billions of disposable batteries, creating unsustainable economic and environmental costs. This article proposes generation-agnostic zero-energy devices (XG-ZEDs), a new class of backscatter based IoT devices that are battery-less, spectrum-agnostic, and future-proof across successive network generations. XG-ZEDs exploit existing ambient wireless signals for communication, sensing, and localization, transforming infrastructure and user devices into universal enablers of ultra-low-power connectivity. We review architectural classifications, communication protocols, network integration, and representative applications such as sensing, localization, and radio-SLAM, while outlining the challenges ahead.
Doppler Estimation and Compensation Techniques in LoRa Direct-to-Satellite Communications
Jun 25, 2025Within the LPWAN framework, the LoRa modulation adopted by LoRaWAN technology has garnered significant interest as a connectivity solution for IoT applications due to its ability to offer low-cost, low-power, and long-range communications. One emerging use case of LoRa is DtS connectivity, which extends coverage to remote areas for supporting IoT operations. The satellite IoT industry mainly prefers LEO because it has lower launch costs and less path loss compared to Geostationary orbit. However, a major drawback of LEO satellites is the impact of the Doppler effect caused by their mobility. Earlier studies have confirmed that the Doppler effect significantly degrades the LoRa DtS performance. In this paper, we propose four frameworks for Doppler estimation and compensation in LoRa DtS connectivity and numerically compare the performance against the ideal scenario without the Doppler effect. Furthermore, we investigate the trade-offs among these frameworks by analyzing the interplay between spreading factor, and other key parameters related to the Doppler effect. The results provide insights into how to achieve robust LoRa configurations for DtS connectivity.
An Overview on Over-the-air Electromagnetic Signal Processing
Dec 20, 2024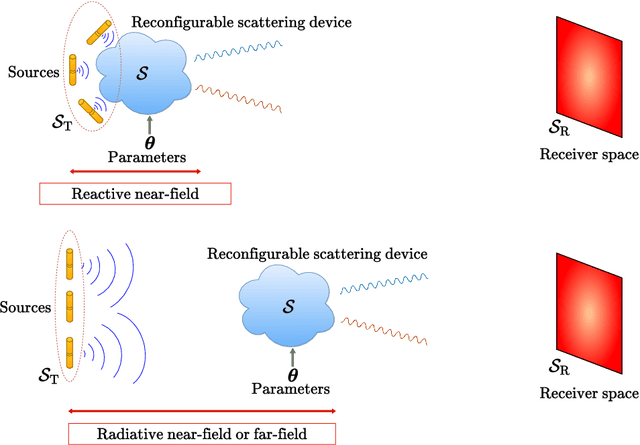
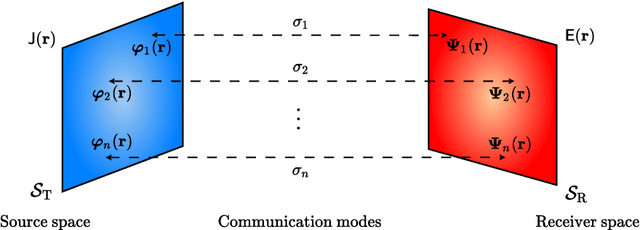
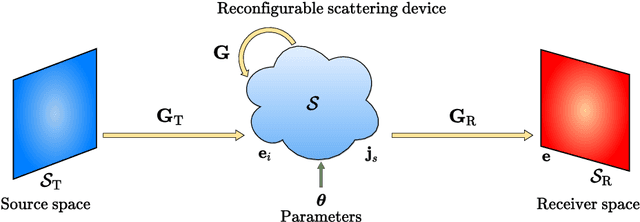
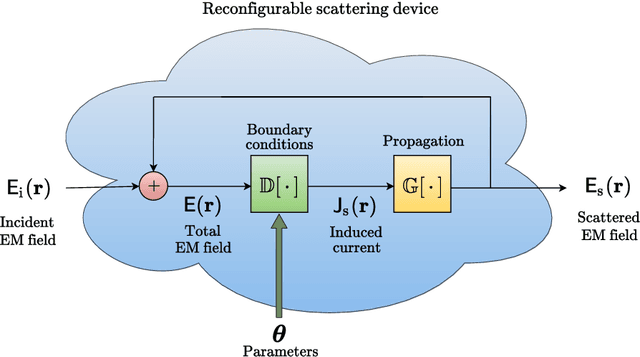
This article provides a tutorial on over-the-air electromagnetic signal processing (ESP) for next-generation wireless networks, addressing the limitations of digital processing to enhance the efficiency and sustainability of future 6th Generation (6G) systems. It explores the integration of electromagnetism and signal processing (SP) highlighting how their convergence can drive innovations for 6G technologies. Key topics include electromagnetic (EM) wave-based processing, the application of metamaterials and advanced antennas to optimize EM field manipulation with a reduced number of radiofrequency chains, and their applications in holographic multiple-input multiple-output systems. By showcasing enabling technologies and use cases, the article demonstrates how wave-based processing can minimize energy consumption, complexity, and latency, offering an effective framework for more sustainable and efficient wireless systems. This article aims to assist researchers and professionals in integrating advanced EM technologies with conventional SP methods.
An Overview on Over-the-airElectromagnetic Signal Processing
Dec 19, 2024This article provides a tutorial on over-the-air electromagnetic signal processing (ESP) for next-generation wireless networks, addressing the limitations of digital processing to enhance the efficiency and sustainability of future 6th Generation (6G) systems. It explores the integration of electromagnetism and signal processing (SP) highlighting how their convergence can drive innovations for 6G technologies. Key topics include electromagnetic (EM) wave-based processing, the application of metamaterials and advanced antennas to optimize EM field manipulation with a reduced number of radiofrequency chains, and their applications in holographic multiple-input multiple-output systems. By showcasing enabling technologies and use cases, the article demonstrates how wave-based processing can minimize energy consumption, complexity, and latency, offering an effective framework for more sustainable and efficient wireless systems. This article aims to assist researchers and professionals in integrating advanced EM technologies with conventional SP methods.
Probabilistic Allocation of Payload Code Rate and Header Copies in LR-FHSS Networks
Oct 07, 2024



We evaluate the performance of the LoRaWAN Long-Range Frequency Hopping Spread Spectrum (LR-FHSS) technique using a device-level probabilistic strategy for code rate and header replica allocation. Specifically, we investigate the effects of different header replica and code rate allocations at each end-device, guided by a probability distribution provided by the network server. As a benchmark, we compare the proposed strategy with the standardized LR-FHSS data rates DR8 and DR9. Our numerical results demonstrate that the proposed strategy consistently outperforms the DR8 and DR9 standard data rates across all considered scenarios. Notably, our findings reveal that the optimal distribution rarely includes data rate DR9, while data rate DR8 significantly contributes to the goodput and energy efficiency optimizations.
Localization Based on MIMO Backscattering from Retro-Directive Antenna Arrays
Apr 22, 2024



In next-generation vehicular environments, precise localization is crucial for facilitating advanced applications such as autonomous driving. As automation levels escalate, the demand rises for enhanced accuracy, reliability, energy efficiency, update rate, and reduced latency in position information delivery. In this paper, we propose the exploitation of backscattering from retro-directive antenna arrays (RAAs) to address these imperatives. We introduce and discuss two RAA-based architectures designed for various applications, including network localization and navigation. These architectures enable swift and simple angle-of-arrival estimation by using signals backscattered from RAAs. They also leverage multiple antennas to capitalize on multiple-input-multiple-output (MIMO) gains, thereby addressing the challenges posed by the inherent path loss in backscatter communication, especially when operating at high frequencies. Consequently, angle-based localization becomes achievable with remarkably low latency, ideal for mobile and vehicular applications. This paper introduces ad-hoc signalling and processing schemes for this purpose, and their performance is analytically investigated. Numerical results underscore the potential of these schemes, offering precise and ultra-low-latency localization with low complexity and ultra-low energy consumption devices.
Radio SLAM for 6G Systems at THz Frequencies: Design and Experimental Validation
Dec 23, 2022



Next-generation wireless networks will see the convergence of communication and sensing, also exploiting the availability of large bandwidths in the Terahertz (THz) spectrum and electrically large antenna arrays on handheld devices. In particular, it is envisaged that user devices will be able to automatically scan their surroundings by steering a very narrow antenna beam and collecting echoes reflected by objects and walls to derive a map of indoors and infer users' trajectories using simultaneous localization and mapping (SLAM) techniques. In this paper, we address this scenario by proposing original radioSLAM (R-SLAM) algorithms, derived from image processing techniques, to map the environment and pinpoint the device position in the map starting from measurements sensed by a mobile THz radar. Initially, to fully understand the THz backscattering phenomenon, we provide an experimental characterization of the THz backscattering channel in indoor environments. Then, the performance of the proposed algorithms is assessed using real-world THz radar measurements and is compared with state-of-the-art SLAM techniques, demonstrating the superiority of the proposed approaches.
Grant-free Random Access with Self-conjugating Metasurfaces
Dec 23, 2022



Recently, grant-free random access schemes have received significant attention in the scientific community as a solution for extremely low-latency massive communications in new industrial Internet-of-things (IIoT) and digital twins applications. Unfortunately, the adoption of such schemes in the mmWave and THz bands is challenging because massive antenna arrays are needed to counteract the high path loss and provide massive access with consequent significant signaling overhead for channel estimation and slow beam alignment procedures between the base station (BS) and user equipments (UEs), which are in contrast to the ultra-low-latency requirement, as well as to the need for low hardware complexity and energy consumption. In this paper, we propose the adoption of a self-conjugating metasurface (SCM) at the UE side, where the signal sent by the BS is reflected after being conjugated and phase-modulated according to the UE data. Then, a novel grant-free random access protocol is presented capable to detect new UEs and establish parallel multiple-input multiple-output (MIMO) uplink communications with almost zero latency and jitter. This is done in a blind way without the need for RF/ADC chains at the UE side as well as without explicit channel estimation and time-consuming beam alignment schemes.
Automatic Mapping of the Indoor World with Personal Radars
Oct 28, 2019

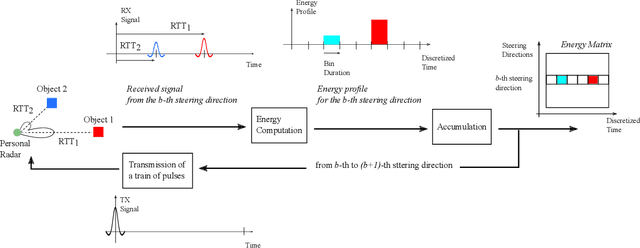
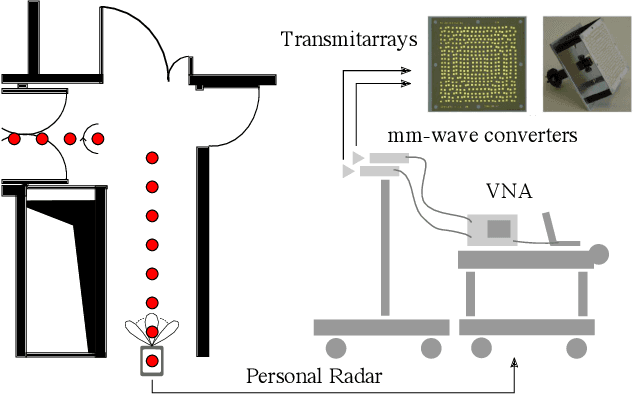
Digital maps will revolutionize our experience of perceiving and navigating indoor environments. While today we rely only on the representation of the outdoors, the mapping of indoors is mainly a part of the traditional SLAM problem where robots discover the surrounding and perform self-localization. Nonetheless, robot deployment prevents from a large diffusion and fast mapping of indoors and, further, they are usually equipped with laser and vision technology that fail in scarce visibility conditions. To this end, a possible solution is to turn future personal devices into personal radars as a milestone towards the automatic generation of indoor maps using massive array technology at millimeter-waves, already in place for communications. In this application-oriented paper, we will describe the main achievements attained so far to develop the personal radar concept, using ad-hoc collected experimental data, and by discussing possible future directions of investigation.