 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalization Based on MIMO Backscattering from Retro-Directive Antenna Arrays
Apr 22, 2024



In next-generation vehicular environments, precise localization is crucial for facilitating advanced applications such as autonomous driving. As automation levels escalate, the demand rises for enhanced accuracy, reliability, energy efficiency, update rate, and reduced latency in position information delivery. In this paper, we propose the exploitation of backscattering from retro-directive antenna arrays (RAAs) to address these imperatives. We introduce and discuss two RAA-based architectures designed for various applications, including network localization and navigation. These architectures enable swift and simple angle-of-arrival estimation by using signals backscattered from RAAs. They also leverage multiple antennas to capitalize on multiple-input-multiple-output (MIMO) gains, thereby addressing the challenges posed by the inherent path loss in backscatter communication, especially when operating at high frequencies. Consequently, angle-based localization becomes achievable with remarkably low latency, ideal for mobile and vehicular applications. This paper introduces ad-hoc signalling and processing schemes for this purpose, and their performance is analytically investigated. Numerical results underscore the potential of these schemes, offering precise and ultra-low-latency localization with low complexity and ultra-low energy consumption devices.
NLOS Localization Exploiting Frequency-selective Metasurfaces
Jul 24, 2023

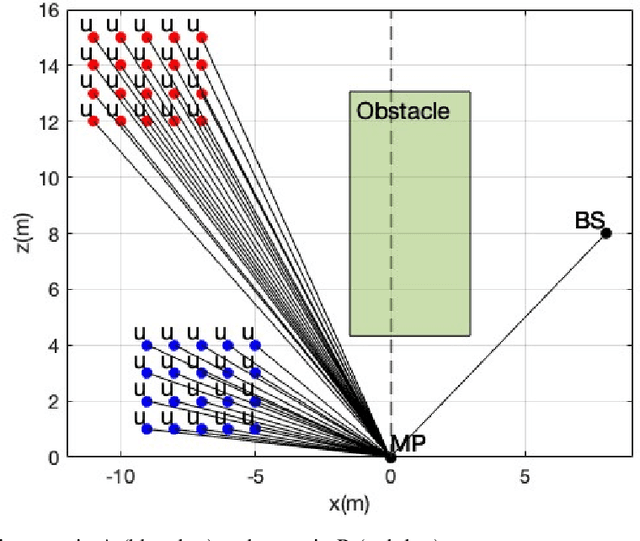
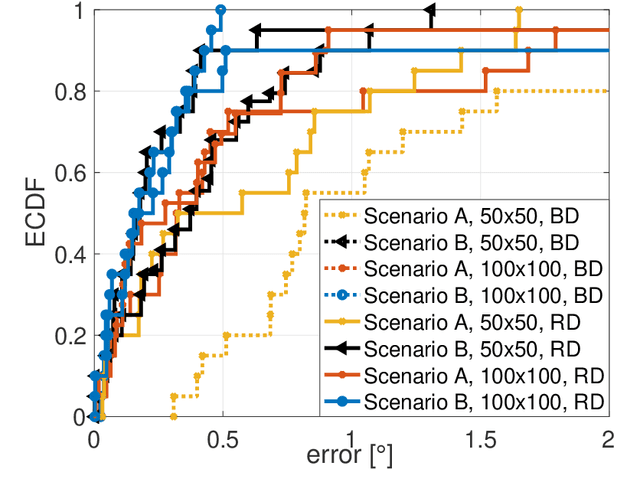
This paper introduces a new approach to localize user devices located in non-line-of-sight (NLOS) areas using a passive, non-reconfigurable, and frequency-selective metasurface called metaprism. By analyzing the spatial filtering of subcarriers in the orthogonal frequency division multiplexing (OFDM) signal transmitted by each user device, the base station can estimate the device's angle of view, distance, and subsequently its position. Two different criteria are proposed for designing the frequency response of the metaprism, depending on whether the users operate in the far-field or near-field region of the metaprism. Simulation results in the millimeter-wave band demonstrate that the system can achieve an accuracy of less than 2 degrees in angle estimation and in the order of decimeters in position estimation.
Radio SLAM for 6G Systems at THz Frequencies: Design and Experimental Validation
Dec 23, 2022



Next-generation wireless networks will see the convergence of communication and sensing, also exploiting the availability of large bandwidths in the Terahertz (THz) spectrum and electrically large antenna arrays on handheld devices. In particular, it is envisaged that user devices will be able to automatically scan their surroundings by steering a very narrow antenna beam and collecting echoes reflected by objects and walls to derive a map of indoors and infer users' trajectories using simultaneous localization and mapping (SLAM) techniques. In this paper, we address this scenario by proposing original radioSLAM (R-SLAM) algorithms, derived from image processing techniques, to map the environment and pinpoint the device position in the map starting from measurements sensed by a mobile THz radar. Initially, to fully understand the THz backscattering phenomenon, we provide an experimental characterization of the THz backscattering channel in indoor environments. Then, the performance of the proposed algorithms is assessed using real-world THz radar measurements and is compared with state-of-the-art SLAM techniques, demonstrating the superiority of the proposed approaches.
Grant-free Random Access with Self-conjugating Metasurfaces
Dec 23, 2022



Recently, grant-free random access schemes have received significant attention in the scientific community as a solution for extremely low-latency massive communications in new industrial Internet-of-things (IIoT) and digital twins applications. Unfortunately, the adoption of such schemes in the mmWave and THz bands is challenging because massive antenna arrays are needed to counteract the high path loss and provide massive access with consequent significant signaling overhead for channel estimation and slow beam alignment procedures between the base station (BS) and user equipments (UEs), which are in contrast to the ultra-low-latency requirement, as well as to the need for low hardware complexity and energy consumption. In this paper, we propose the adoption of a self-conjugating metasurface (SCM) at the UE side, where the signal sent by the BS is reflected after being conjugated and phase-modulated according to the UE data. Then, a novel grant-free random access protocol is presented capable to detect new UEs and establish parallel multiple-input multiple-output (MIMO) uplink communications with almost zero latency and jitter. This is done in a blind way without the need for RF/ADC chains at the UE side as well as without explicit channel estimation and time-consuming beam alignment schemes.