 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamPilot: Improving Camera Control in Video Diffusion Model with Efficient Camera Reward Feedback
Jan 22, 2026Recent advances in camera-controlled video diffusion models have significantly improved video-camera alignment. However, the camera controllability still remains limited. In this work, we build upon Reward Feedback Learning and aim to further improve camera controllability. However, directly borrowing existing ReFL approaches faces several challenges. First, current reward models lack the capacity to assess video-camera alignment. Second, decoding latent into RGB videos for reward computation introduces substantial computational overhead. Third, 3D geometric information is typically neglected during video decoding. To address these limitations, we introduce an efficient camera-aware 3D decoder that decodes video latent into 3D representations for reward quantization. Specifically, video latent along with the camera pose are decoded into 3D Gaussians. In this process, the camera pose not only acts as input, but also serves as a projection parameter. Misalignment between the video latent and camera pose will cause geometric distortions in the 3D structure, resulting in blurry renderings. Based on this property, we explicitly optimize pixel-level consistency between the rendered novel views and ground-truth ones as reward. To accommodate the stochastic nature, we further introduce a visibility term that selectively supervises only deterministic regions derived via geometric warping. Extensive experiments conducted on RealEstate10K and WorldScore benchmarks demonstrate the effectiveness of our proposed method. Project page: \href{https://a-bigbao.github.io/CamPilot/}{CamPilot Page}.
A Mechanistic View on Video Generation as World Models: State and Dynamics
Jan 22, 2026Large-scale video generation models have demonstrated emergent physical coherence, positioning them as potential world models. However, a gap remains between contemporary "stateless" video architectures and classic state-centric world model theories. This work bridges this gap by proposing a novel taxonomy centered on two pillars: State Construction and Dynamics Modeling. We categorize state construction into implicit paradigms (context management) and explicit paradigms (latent compression), while dynamics modeling is analyzed through knowledge integration and architectural reformulation. Furthermore, we advocate for a transition in evaluation from visual fidelity to functional benchmarks, testing physical persistence and causal reasoning. We conclude by identifying two critical frontiers: enhancing persistence via data-driven memory and compressed fidelity, and advancing causality through latent factor decoupling and reasoning-prior integration. By addressing these challenges, the field can evolve from generating visually plausible videos to building robust, general-purpose world simulators.
VideoMemory: Toward Consistent Video Generation via Memory Integration
Jan 07, 2026Maintaining consistent characters, props, and environments across multiple shots is a central challenge in narrative video generation. Existing models can produce high-quality short clips but often fail to preserve entity identity and appearance when scenes change or when entities reappear after long temporal gaps. We present VideoMemory, an entity-centric framework that integrates narrative planning with visual generation through a Dynamic Memory Bank. Given a structured script, a multi-agent system decomposes the narrative into shots, retrieves entity representations from memory, and synthesizes keyframes and videos conditioned on these retrieved states. The Dynamic Memory Bank stores explicit visual and semantic descriptors for characters, props, and backgrounds, and is updated after each shot to reflect story-driven changes while preserving identity. This retrieval-update mechanism enables consistent portrayal of entities across distant shots and supports coherent long-form generation. To evaluate this setting, we construct a 54-case multi-shot consistency benchmark covering character-, prop-, and background-persistent scenarios. Extensive experiments show that VideoMemory achieves strong entity-level coherence and high perceptual quality across diverse narrative sequences.
StereoPilot: Learning Unified and Efficient Stereo Conversion via Generative Priors
Dec 18, 2025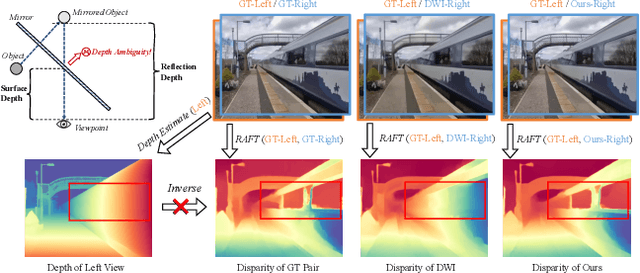

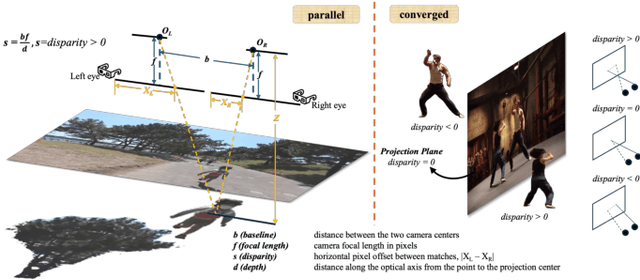
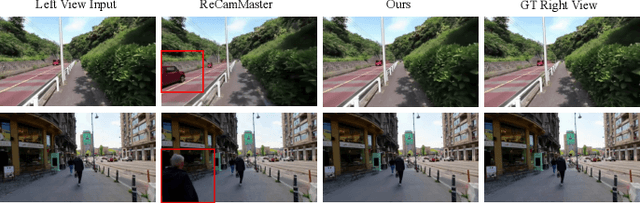
The rapid growth of stereoscopic displays, including VR headsets and 3D cinemas, has led to increasing demand for high-quality stereo video content. However, producing 3D videos remains costly and complex, while automatic Monocular-to-Stereo conversion is hindered by the limitations of the multi-stage ``Depth-Warp-Inpaint'' (DWI) pipeline. This paradigm suffers from error propagation, depth ambiguity, and format inconsistency between parallel and converged stereo configurations. To address these challenges, we introduce UniStereo, the first large-scale unified dataset for stereo video conversion, covering both stereo formats to enable fair benchmarking and robust model training. Building upon this dataset, we propose StereoPilot, an efficient feed-forward model that directly synthesizes the target view without relying on explicit depth maps or iterative diffusion sampling. Equipped with a learnable domain switcher and a cycle consistency loss, StereoPilot adapts seamlessly to different stereo formats and achieves improved consistency. Extensive experiments demonstrate that StereoPilot significantly outperforms state-of-the-art methods in both visual fidelity and computational efficiency. Project page: https://hit-perfect.github.io/StereoPilot/.
ComfyMind: Toward General-Purpose Generation via Tree-Based Planning and Reactive Feedback
May 23, 2025With the rapid advancement of generative models, general-purpose generation has gained increasing attention as a promising approach to unify diverse tasks across modalities within a single system. Despite this progress, existing open-source frameworks often remain fragile and struggle to support complex real-world applications due to the lack of structured workflow planning and execution-level feedback. To address these limitations, we present ComfyMind, a collaborative AI system designed to enable robust and scalable general-purpose generation, built on the ComfyUI platform. ComfyMind introduces two core innovations: Semantic Workflow Interface (SWI) that abstracts low-level node graphs into callable functional modules described in natural language, enabling high-level composition and reducing structural errors; Search Tree Planning mechanism with localized feedback execution, which models generation as a hierarchical decision process and allows adaptive correction at each stage. Together, these components improve the stability and flexibility of complex generative workflows. We evaluate ComfyMind on three public benchmarks: ComfyBench, GenEval, and Reason-Edit, which span generation, editing, and reasoning tasks. Results show that ComfyMind consistently outperforms existing open-source baselines and achieves performance comparable to GPT-Image-1. ComfyMind paves a promising path for the development of open-source general-purpose generative AI systems. Project page: https://github.com/LitaoGuo/ComfyMind
RectifiedHR: Enable Efficient High-Resolution Image Generation via Energy Rectification
Mar 04, 2025Diffusion models have achieved remarkable advances in various image generation tasks. However, their performance notably declines when generating images at resolutions higher than those used during the training period. Despite the existence of numerous methods for producing high-resolution images, they either suffer from inefficiency or are hindered by complex operations. In this paper, we propose RectifiedHR, an efficient and straightforward solution for training-free high-resolution image generation. Specifically, we introduce the noise refresh strategy, which theoretically only requires a few lines of code to unlock the model's high-resolution generation ability and improve efficiency. Additionally, we first observe the phenomenon of energy decay that may cause image blurriness during the high-resolution image generation process. To address this issue, we propose an Energy Rectification strategy, where modifying the hyperparameters of the classifier-free guidance effectively improves the generation performance. Our method is entirely training-free and boasts a simple implementation logic. Through extensive comparisons with numerous baseline methods, our RectifiedHR demonstrates superior effectiveness and efficiency.
TransPixar: Advancing Text-to-Video Generation with Transparency
Jan 06, 2025



Text-to-video generative models have made significant strides, enabling diverse applications in entertainment, advertising, and education. However, generating RGBA video, which includes alpha channels for transparency, remains a challenge due to limited datasets and the difficulty of adapting existing models. Alpha channels are crucial for visual effects (VFX), allowing transparent elements like smoke and reflections to blend seamlessly into scenes. We introduce TransPixar, a method to extend pretrained video models for RGBA generation while retaining the original RGB capabilities. TransPixar leverages a diffusion transformer (DiT) architecture, incorporating alpha-specific tokens and using LoRA-based fine-tuning to jointly generate RGB and alpha channels with high consistency. By optimizing attention mechanisms, TransPixar preserves the strengths of the original RGB model and achieves strong alignment between RGB and alpha channels despite limited training data. Our approach effectively generates diverse and consistent RGBA videos, advancing the possibilities for VFX and interactive content creation.
Uni-Renderer: Unifying Rendering and Inverse Rendering Via Dual Stream Diffusion
Dec 19, 2024



Rendering and inverse rendering are pivotal tasks in both computer vision and graphics. The rendering equation is the core of the two tasks, as an ideal conditional distribution transfer function from intrinsic properties to RGB images. Despite achieving promising results of existing rendering methods, they merely approximate the ideal estimation for a specific scene and come with a high computational cost. Additionally, the inverse conditional distribution transfer is intractable due to the inherent ambiguity. To address these challenges, we propose a data-driven method that jointly models rendering and inverse rendering as two conditional generation tasks within a single diffusion framework. Inspired by UniDiffuser, we utilize two distinct time schedules to model both tasks, and with a tailored dual streaming module, we achieve cross-conditioning of two pre-trained diffusion models. This unified approach, named Uni-Renderer, allows the two processes to facilitate each other through a cycle-consistent constrain, mitigating ambiguity by enforcing consistency between intrinsic properties and rendered images. Combined with a meticulously prepared dataset, our method effectively decomposition of intrinsic properties and demonstrates a strong capability to recognize changes during rendering. We will open-source our training and inference code to the public, fostering further research and development in this area.
LucidFusion: Generating 3D Gaussians with Arbitrary Unposed Images
Oct 21, 2024
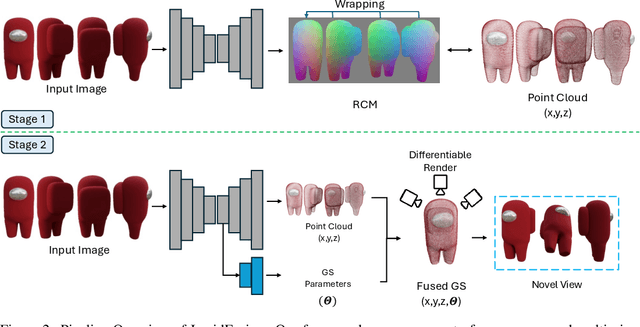

Recent large reconstruction models have made notable progress in generating high-quality 3D objects from single images. However, these methods often struggle with controllability, as they lack information from multiple views, leading to incomplete or inconsistent 3D reconstructions. To address this limitation, we introduce LucidFusion, a flexible end-to-end feed-forward framework that leverages the Relative Coordinate Map (RCM). Unlike traditional methods linking images to 3D world thorough pose, LucidFusion utilizes RCM to align geometric features coherently across different views, making it highly adaptable for 3D generation from arbitrary, unposed images. Furthermore, LucidFusion seamlessly integrates with the original single-image-to-3D pipeline, producing detailed 3D Gaussians at a resolution of $512 \times 512$, making it well-suited for a wide range of applications.
SG-Adapter: Enhancing Text-to-Image Generation with Scene Graph Guidance
May 24, 2024
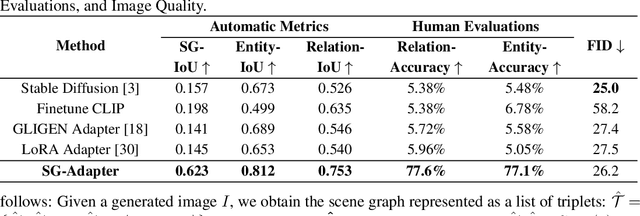
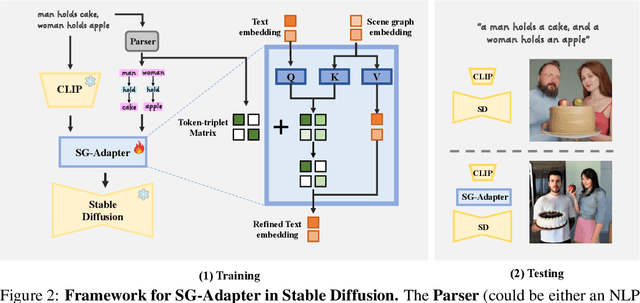
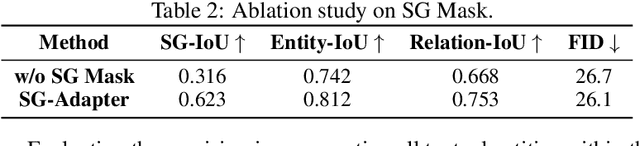
Recent advancements in text-to-image generation have been propelled by the development of diffusion models and multi-modality learning. However, since text is typically represented sequentially in these models, it often falls short in providing accurate contextualization and structural control. So the generated images do not consistently align with human expectations, especially in complex scenarios involving multiple objects and relationships. In this paper, we introduce the Scene Graph Adapter(SG-Adapter), leveraging the structured representation of scene graphs to rectify inaccuracies in the original text embeddings. The SG-Adapter's explicit and non-fully connected graph representation greatly improves the fully connected, transformer-based text representations. This enhancement is particularly notable in maintaining precise correspondence in scenarios involving multiple relationships. To address the challenges posed by low-quality annotated datasets like Visual Genome, we have manually curated a highly clean, multi-relational scene graph-image paired dataset MultiRels. Furthermore, we design three metrics derived from GPT-4V to effectively and thoroughly measure the correspondence between images and scene graphs. Both qualitative and quantitative results validate the efficacy of our approach in controlling the correspondence in multiple relationships.