 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSceneTransporter: Optimal Transport-Guided Compositional Latent Diffusion for Single-Image Structured 3D Scene Generation
Feb 26, 2026We introduce SceneTransporter, an end-to-end framework for structured 3D scene generation from a single image. While existing methods generate part-level 3D objects, they often fail to organize these parts into distinct instances in open-world scenes. Through a debiased clustering probe, we reveal a critical insight: this failure stems from the lack of structural constraints within the model's internal assignment mechanism. Based on this finding, we reframe the task of structured 3D scene generation as a global correlation assignment problem. To solve this, SceneTransporter formulates and solves an entropic Optimal Transport (OT) objective within the denoising loop of the compositional DiT model. This formulation imposes two powerful structural constraints. First, the resulting transport plan gates cross-attention to enforce an exclusive, one-to-one routing of image patches to part-level 3D latents, preventing entanglement. Second, the competitive nature of the transport encourages the grouping of similar patches, a process that is further regularized by an edge-based cost, to form coherent objects and prevent fragmentation. Extensive experiments show that SceneTransporter outperforms existing methods on open-world scene generation, significantly improving instance-level coherence and geometric fidelity. Code and models will be publicly available at https://2019epwl.github.io/SceneTransporter/.
FlexAM: Flexible Appearance-Motion Decomposition for Versatile Video Generation Control
Feb 13, 2026Effective and generalizable control in video generation remains a significant challenge. While many methods rely on ambiguous or task-specific signals, we argue that a fundamental disentanglement of "appearance" and "motion" provides a more robust and scalable pathway. We propose FlexAM, a unified framework built upon a novel 3D control signal. This signal represents video dynamics as a point cloud, introducing three key enhancements: multi-frequency positional encoding to distinguish fine-grained motion, depth-aware positional encoding, and a flexible control signal for balancing precision and generative quality. This representation allows FlexAM to effectively disentangle appearance and motion, enabling a wide range of tasks including I2V/V2V editing, camera control, and spatial object editing. Extensive experiments demonstrate that FlexAM achieves superior performance across all evaluated tasks.
Matrix-3D: Omnidirectional Explorable 3D World Generation
Aug 11, 2025Explorable 3D world generation from a single image or text prompt forms a cornerstone of spatial intelligence. Recent works utilize video model to achieve wide-scope and generalizable 3D world generation. However, existing approaches often suffer from a limited scope in the generated scenes. In this work, we propose Matrix-3D, a framework that utilize panoramic representation for wide-coverage omnidirectional explorable 3D world generation that combines conditional video generation and panoramic 3D reconstruction. We first train a trajectory-guided panoramic video diffusion model that employs scene mesh renders as condition, to enable high-quality and geometrically consistent scene video generation. To lift the panorama scene video to 3D world, we propose two separate methods: (1) a feed-forward large panorama reconstruction model for rapid 3D scene reconstruction and (2) an optimization-based pipeline for accurate and detailed 3D scene reconstruction. To facilitate effective training, we also introduce the Matrix-Pano dataset, the first large-scale synthetic collection comprising 116K high-quality static panoramic video sequences with depth and trajectory annotations. Extensive experiments demonstrate that our proposed framework achieves state-of-the-art performance in panoramic video generation and 3D world generation. See more in https://matrix-3d.github.io.
LucidFusion: Generating 3D Gaussians with Arbitrary Unposed Images
Oct 21, 2024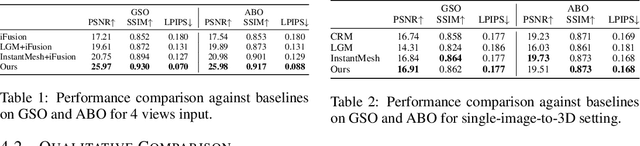
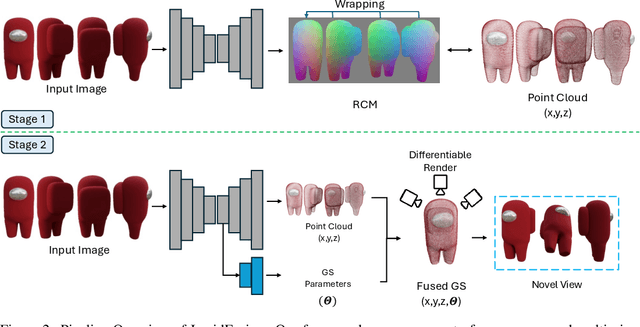

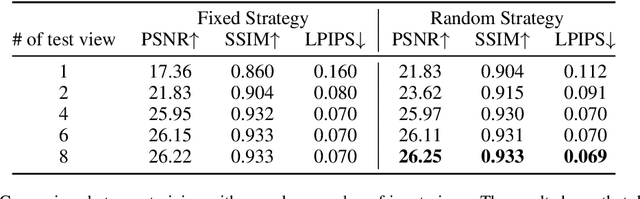
Recent large reconstruction models have made notable progress in generating high-quality 3D objects from single images. However, these methods often struggle with controllability, as they lack information from multiple views, leading to incomplete or inconsistent 3D reconstructions. To address this limitation, we introduce LucidFusion, a flexible end-to-end feed-forward framework that leverages the Relative Coordinate Map (RCM). Unlike traditional methods linking images to 3D world thorough pose, LucidFusion utilizes RCM to align geometric features coherently across different views, making it highly adaptable for 3D generation from arbitrary, unposed images. Furthermore, LucidFusion seamlessly integrates with the original single-image-to-3D pipeline, producing detailed 3D Gaussians at a resolution of $512 \times 512$, making it well-suited for a wide range of applications.
Part123: Part-aware 3D Reconstruction from a Single-view Image
May 27, 2024



Recently, the emergence of diffusion models has opened up new opportunities for single-view reconstruction. However, all the existing methods represent the target object as a closed mesh devoid of any structural information, thus neglecting the part-based structure, which is crucial for many downstream applications, of the reconstructed shape. Moreover, the generated meshes usually suffer from large noises, unsmooth surfaces, and blurry textures, making it challenging to obtain satisfactory part segments using 3D segmentation techniques. In this paper, we present Part123, a novel framework for part-aware 3D reconstruction from a single-view image. We first use diffusion models to generate multiview-consistent images from a given image, and then leverage Segment Anything Model (SAM), which demonstrates powerful generalization ability on arbitrary objects, to generate multiview segmentation masks. To effectively incorporate 2D part-based information into 3D reconstruction and handle inconsistency, we introduce contrastive learning into a neural rendering framework to learn a part-aware feature space based on the multiview segmentation masks. A clustering-based algorithm is also developed to automatically derive 3D part segmentation results from the reconstructed models. Experiments show that our method can generate 3D models with high-quality segmented parts on various objects. Compared to existing unstructured reconstruction methods, the part-aware 3D models from our method benefit some important applications, including feature-preserving reconstruction, primitive fitting, and 3D shape editing.
Implicit Conversion of Manifold B-Rep Solids by Neural Halfspace Representation
Sep 21, 2022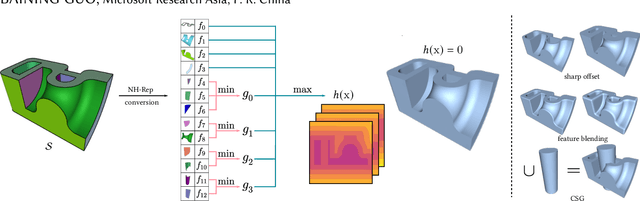
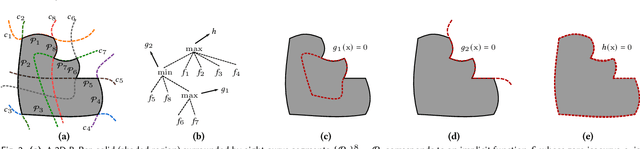
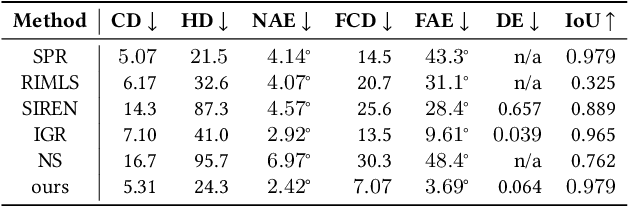
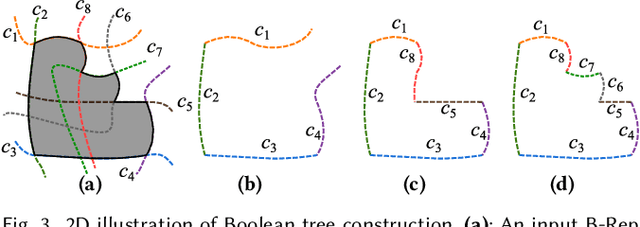
We present a novel implicit representation -- neural halfspace representation (NH-Rep), to convert manifold B-Rep solids to implicit representations. NH-Rep is a Boolean tree built on a set of implicit functions represented by the neural network, and the composite Boolean function is capable of representing solid geometry while preserving sharp features. We propose an efficient algorithm to extract the Boolean tree from a manifold B-Rep solid and devise a neural network-based optimization approach to compute the implicit functions. We demonstrate the high quality offered by our conversion algorithm on ten thousand manifold B-Rep CAD models that contain various curved patches including NURBS, and the superiority of our learning approach over other representative implicit conversion algorithms in terms of surface reconstruction, sharp feature preservation, signed distance field approximation, and robustness to various surface geometry, as well as a set of applications supported by NH-Rep.
* Accepted to SIGGRAPH Asia 2022. Our supplemental material and code are available at https://guohaoxiang.github.io/projects/nhrep.html
Semi-supervised 3D shape segmentation with multilevel consistency and part substitution
Apr 20, 2022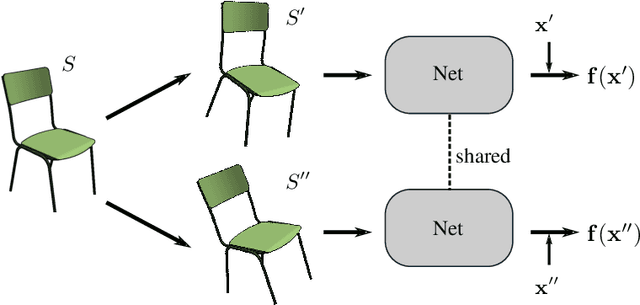
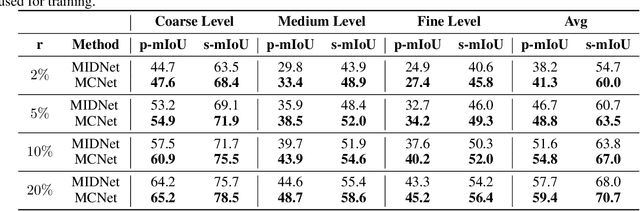
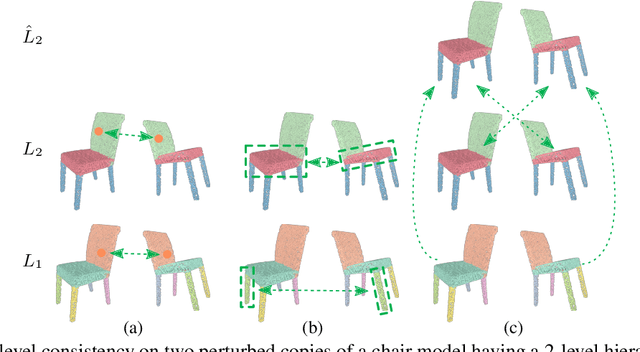
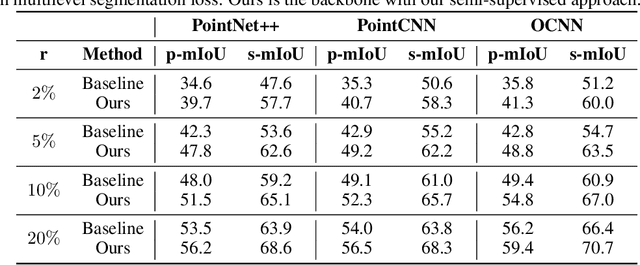
The lack of fine-grained 3D shape segmentation data is the main obstacle to developing learning-based 3D segmentation techniques. We propose an effective semi-supervised method for learning 3D segmentations from a few labeled 3D shapes and a large amount of unlabeled 3D data. For the unlabeled data, we present a novel multilevel consistency loss to enforce consistency of network predictions between perturbed copies of a 3D shape at multiple levels: point-level, part-level, and hierarchical level. For the labeled data, we develop a simple yet effective part substitution scheme to augment the labeled 3D shapes with more structural variations to enhance training. Our method has been extensively validated on the task of 3D object semantic segmentation on PartNet and ShapeNetPart, and indoor scene semantic segmentation on ScanNet. It exhibits superior performance to existing semi-supervised and unsupervised pre-training 3D approaches. Our code and trained models are publicly available at https://github.com/isunchy/semi_supervised_3d_segmentation.
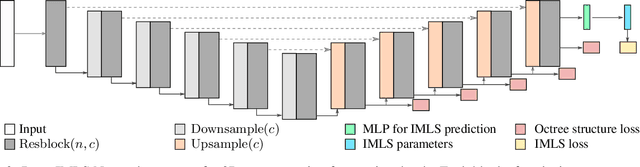
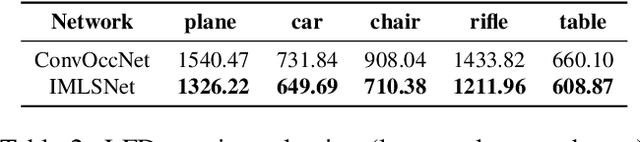
Deep Implicit Moving Least-Squares Functions for 3D Reconstruction
Apr 06, 2021

Point set is a flexible and lightweight representation widely used for 3D deep learning. However, their discrete nature prevents them from representing continuous and fine geometry, posing a major issue for learning-based shape generation. In this work, we turn the discrete point sets into smooth surfaces by introducing the well-known implicit moving least-squares (IMLS) surface formulation, which naturally defines locally implicit functions on point sets. We incorporate IMLS surface generation into deep neural networks for inheriting both the flexibility of point sets and the high quality of implicit surfaces. Our IMLSNet predicts an octree structure as a scaffold for generating MLS points where needed and characterizes shape geometry with learned local priors. Furthermore, our implicit function evaluation is independent of the neural network once the MLS points are predicted, thus enabling fast runtime evaluation. Our experiments on 3D object reconstruction demonstrate that IMLSNets outperform state-of-the-art learning-based methods in terms of reconstruction quality and computational efficiency. Extensive ablation tests also validate our network design and loss functions.