 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolyReal: A Benchmark for Real-World Polymer Science Workflows
Apr 03, 2026Multimodal Large Language Models (MLLMs) excel in general domains but struggle with complex, real-world science. We posit that polymer science, an interdisciplinary field spanning chemistry, physics, biology, and engineering, is an ideal high-stakes testbed due to its diverse multimodal data. Yet, existing benchmarks related to polymer science largely overlook real-world workflows, limiting their practical utility and failing to systematically evaluate MLLMs across the full, practice-grounded lifecycle of experimentation. We introduce PolyReal, a novel multimodal benchmark grounded in real-world scientific practices to evaluate MLLMs on the full lifecycle of polymer experimentation. It covers five critical capabilities: (1) foundational knowledge application; (2) lab safety analysis; (3) experiment mechanism reasoning; (4) raw data extraction; and (5) performance & application exploration. Our evaluation of leading MLLMs on PolyReal reveals a capability imbalance. While models perform well on knowledge-intensive reasoning (e.g., Experiment Mechanism Reasoning), they drop sharply on practice-based tasks (e.g., Lab Safety Analysis and Raw Data Extraction). This exposes a severe gap between abstract scientific knowledge and its practical, context-dependent application, showing that these real-world tasks remain challenging for MLLMs. Thus, PolyReal helps address this evaluation gap and provides a practical benchmark for assessing AI systems in real-world scientific workflows.
RAIE: Region-Aware Incremental Preference Editing with LoRA for LLM-based Recommendation
Feb 28, 2026Large language models (LLMs) are increasingly adopted as the backbone of recommender systems. However, user-item interactions in real-world scenarios are non-stationary, making preference drift over time inevitable. Existing model update strategies mainly rely on global fine-tuning or pointwise editing, but they face two fundamental challenges: (i) imbalanced update granularity, where global updates perturb behaviors unrelated to the target while pointwise edits fail to capture broader preference shifts; (ii) unstable incremental updates, where repeated edits interfere with prior adaptations, leading to catastrophic forgetting and inconsistent recommendations. To address these issues, we propose Region-Aware Incremental Editing (RAIE), a plug-in framework that freezes the backbone model and performs region-level updates. RAIE first constructs semantically coherent preference regions via spherical k-means in the representation space. It then assigns incoming sequences to regions via confidence-aware gating and performs three localized edit operations - Update, Expand, and Add - to dynamically revise the affected region. Each region is equipped with a dedicated Low-Rank Adaptation (LoRA) module, which is trained only on the region's updated data. During inference, RAIE routes each user sequence to its corresponding region and activates the region-specific adapter for prediction. Experiments on two benchmark datasets under a time-sliced protocol that segments data into Set-up (S), Finetune (F), and Test (T) show that RAIE significantly outperforms state-of-the-art baselines while effectively mitigating forgetting. These results demonstrate that region-aware editing offers an accurate and scalable mechanism for continual adaptation in dynamic recommendation scenarios. Our code is available at https://github.com/fengaogao/RAIE.
CMPhysBench: A Benchmark for Evaluating Large Language Models in Condensed Matter Physics
Aug 25, 2025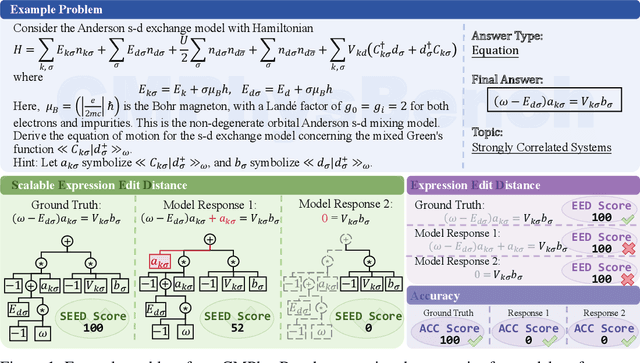
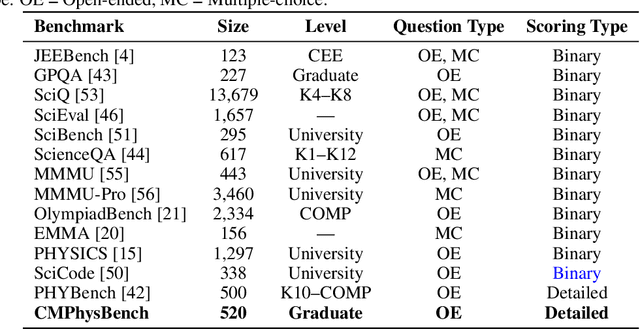
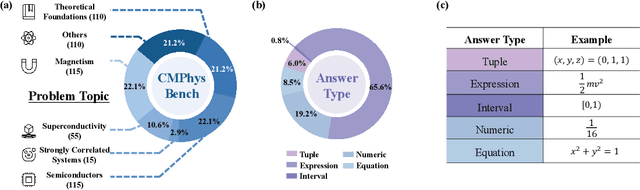

We introduce CMPhysBench, designed to assess the proficiency of Large Language Models (LLMs) in Condensed Matter Physics, as a novel Benchmark. CMPhysBench is composed of more than 520 graduate-level meticulously curated questions covering both representative subfields and foundational theoretical frameworks of condensed matter physics, such as magnetism, superconductivity, strongly correlated systems, etc. To ensure a deep understanding of the problem-solving process,we focus exclusively on calculation problems, requiring LLMs to independently generate comprehensive solutions. Meanwhile, leveraging tree-based representations of expressions, we introduce the Scalable Expression Edit Distance (SEED) score, which provides fine-grained (non-binary) partial credit and yields a more accurate assessment of similarity between prediction and ground-truth. Our results show that even the best models, Grok-4, reach only 36 average SEED score and 28% accuracy on CMPhysBench, underscoring a significant capability gap, especially for this practical and frontier domain relative to traditional physics. The code anddataset are publicly available at https://github.com/CMPhysBench/CMPhysBench.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
Towards Robust Time-of-Flight Depth Denoising with Confidence-Aware Diffusion Model
Mar 25, 2025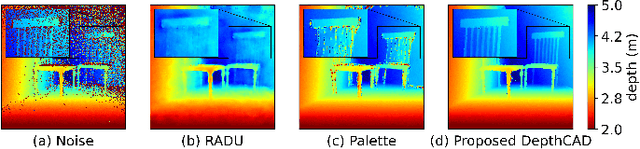
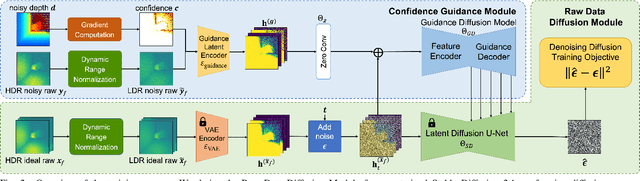
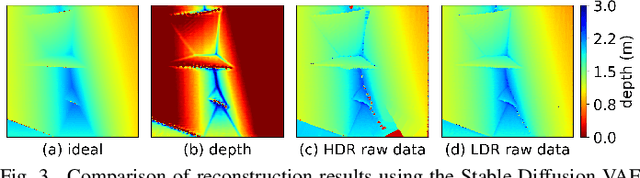
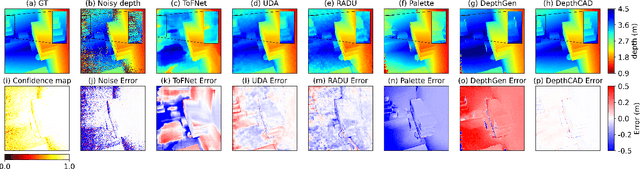
Time-of-Flight (ToF) sensors efficiently capture scene depth, but the nonlinear depth construction procedure often results in extremely large noise variance or even invalid areas. Recent methods based on deep neural networks (DNNs) achieve enhanced ToF denoising accuracy but tend to struggle when presented with severe noise corruption due to limited prior knowledge of ToF data distribution. In this paper, we propose DepthCAD, a novel ToF denoising approach that ensures global structural smoothness by leveraging the rich prior knowledge in Stable Diffusion and maintains local metric accuracy by steering the diffusion process with confidence guidance. To adopt the pretrained image diffusion model to ToF depth denoising, we apply the diffusion on raw ToF correlation measurements with dynamic range normalization before converting to depth maps. Experimental results validate the state-of-the-art performance of the proposed scheme, and the evaluation on real data further verifies its robustness against real-world ToF noise.
URSA: Understanding and Verifying Chain-of-thought Reasoning in Multimodal Mathematics
Jan 08, 2025



Chain-of-thought (CoT) reasoning has been widely applied in the mathematical reasoning of Large Language Models (LLMs). Recently, the introduction of derivative process supervision on CoT trajectories has sparked discussions on enhancing scaling capabilities during test time, thereby boosting the potential of these models. However, in multimodal mathematical reasoning, the scarcity of high-quality CoT training data has hindered existing models from achieving high-precision CoT reasoning and has limited the realization of reasoning potential during test time. In this work, we propose a three-module synthesis strategy that integrates CoT distillation, trajectory-format rewriting, and format unification. It results in a high-quality CoT reasoning instruction fine-tuning dataset in multimodal mathematics, MMathCoT-1M. We comprehensively validate the state-of-the-art (SOTA) performance of the trained URSA-7B model on multiple multimodal mathematical benchmarks. For test-time scaling, we introduce a data synthesis strategy that automatically generates process annotation datasets, known as DualMath-1.1M, focusing on both interpretation and logic. By further training URSA-7B on DualMath-1.1M, we transition from CoT reasoning capabilities to robust supervision abilities. The trained URSA-RM-7B acts as a verifier, effectively enhancing the performance of URSA-7B at test time. URSA-RM-7B also demonstrates excellent out-of-distribution (OOD) verifying capabilities, showcasing its generalization. Model weights, training data and code will be open-sourced.
Math-PUMA: Progressive Upward Multimodal Alignment to Enhance Mathematical Reasoning
Aug 16, 2024


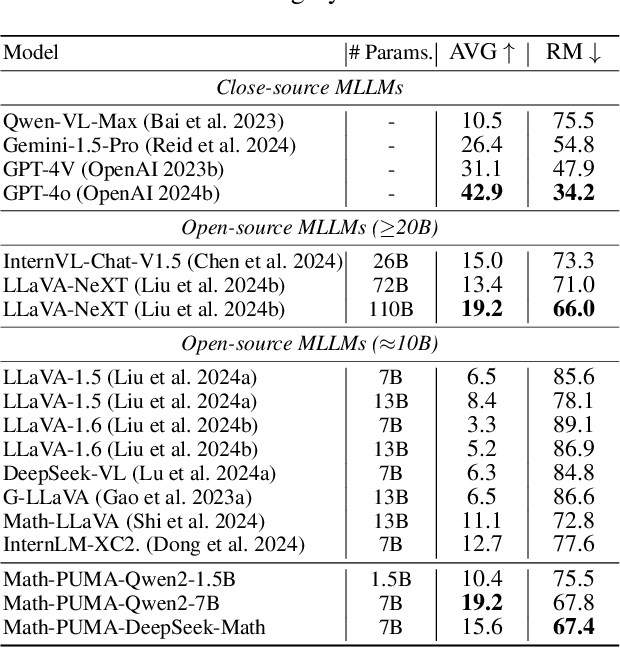
Multimodal Large Language Models (MLLMs) excel in solving text-based mathematical problems, but they struggle with mathematical diagrams since they are primarily trained on natural scene images. For humans, visual aids generally enhance problem-solving, but MLLMs perform worse as information shifts from textual to visual modality. This decline is mainly due to their shortcomings in aligning images and text. To tackle aforementioned challenges, we propose Math-PUMA, a methodology focused on Progressive Upward Multimodal Alignment. This approach is designed to improve the mathematical reasoning skills of MLLMs through a three-stage training process, with the second stage being the critical alignment stage. We first enhance the language model's mathematical reasoning capabilities with extensive set of textual mathematical problems. We then construct a multimodal dataset with varying degrees of textual and visual information, creating data pairs by presenting each problem in at least two forms. By leveraging the Kullback-Leibler (KL) divergence of next-token prediction distributions to align visual and textual modalities, consistent problem-solving abilities are ensured. Finally, we utilize multimodal instruction tuning for MLLMs with high-quality multimodal data. Experimental results on multiple mathematical reasoning benchmarks demonstrate that the MLLMs trained with Math-PUMA surpass most open-source MLLMs. Our approach effectively narrows the performance gap for problems presented in different modalities.
Sparse Graph Learning with Eigen-gap for Spectral Filter Training in Graph Convolutional Networks
Feb 28, 2022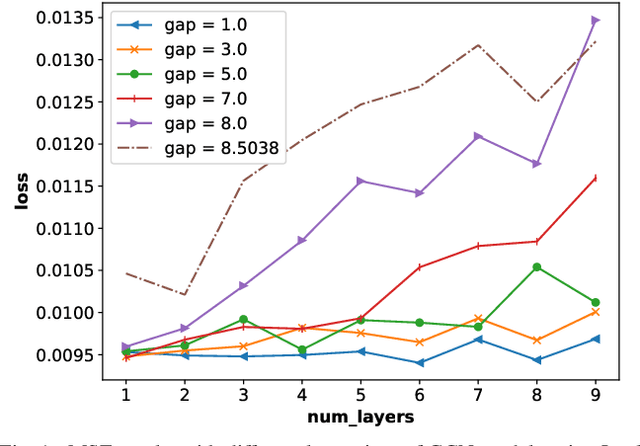
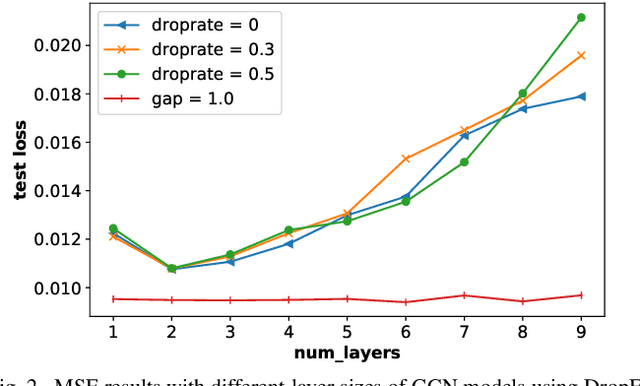
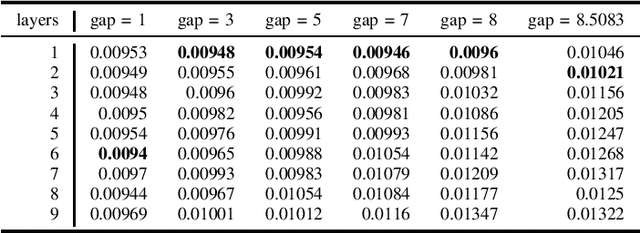
It is now known that the expressive power of graph convolutional neural nets (GCN) does not grow infinitely with the number of layers. Instead, the GCN output approaches a subspace spanned by the first eigenvector of the normalized graph Laplacian matrix with the convergence rate characterized by the "eigen-gap": the difference between the Laplacian's first two distinct eigenvalues. To promote a deeper GCN architecture with sufficient expressiveness, in this paper, given an empirical covariance matrix $\bar{C}$ computed from observable data, we learn a sparse graph Laplacian matrix $L$ closest to $\bar{C}^{-1}$ while maintaining a desirable eigen-gap that slows down convergence. Specifically, we first define a sparse graph learning problem with constraints on the first eigenvector (the most common signal) and the eigen-gap. We solve the corresponding dual problem greedily, where a locally optimal eigen-pair is computed one at a time via a fast approximation of a semi-definite programming (SDP) formulation. The computed $L$ with the desired eigen-gap is normalized spectrally and used for supervised training of GCN for a targeted task. Experiments show that our proposal produced deeper GCNs and smaller errors compared to a competing scheme without explicit eigen-gap optimization.
Towards Geometry Guided Neural Relighting with Flash Photography
Aug 12, 2020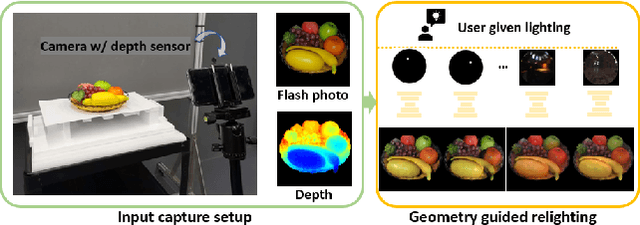
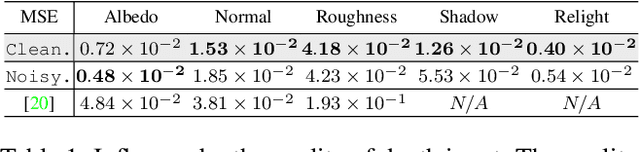
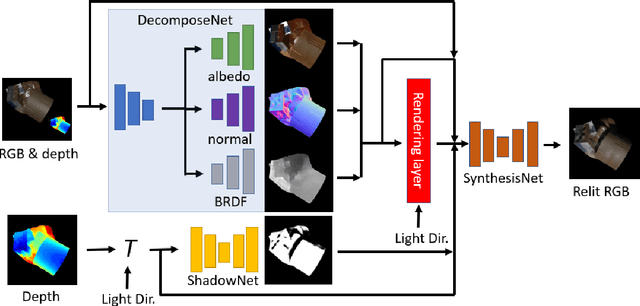
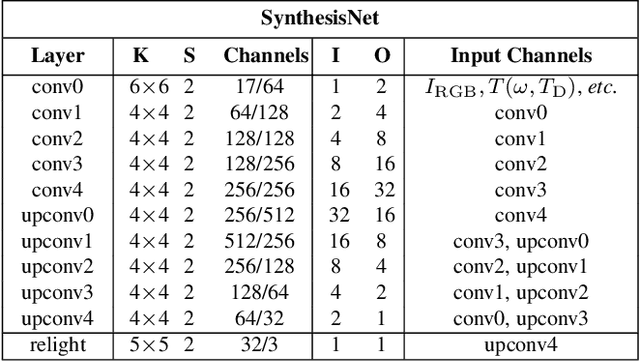
Previous image based relighting methods require capturing multiple images to acquire high frequency lighting effect under different lighting conditions, which needs nontrivial effort and may be unrealistic in certain practical use scenarios. While such approaches rely entirely on cleverly sampling the color images under different lighting conditions, little has been done to utilize geometric information that crucially influences the high-frequency features in the images, such as glossy highlight and cast shadow. We therefore propose a framework for image relighting from a single flash photograph with its corresponding depth map using deep learning. By incorporating the depth map, our approach is able to extrapolate realistic high-frequency effects under novel lighting via geometry guided image decomposition from the flashlight image, and predict the cast shadow map from the shadow-encoding transformed depth map. Moreover, the single-image based setup greatly simplifies the data capture process. We experimentally validate the advantage of our geometry guided approach over state-of-the-art image-based approaches in intrinsic image decomposition and image relighting, and also demonstrate our performance on real mobile phone photo examples.
A Self-Attention Joint Model for Spoken Language Understanding in Situational Dialog Applications
May 27, 2019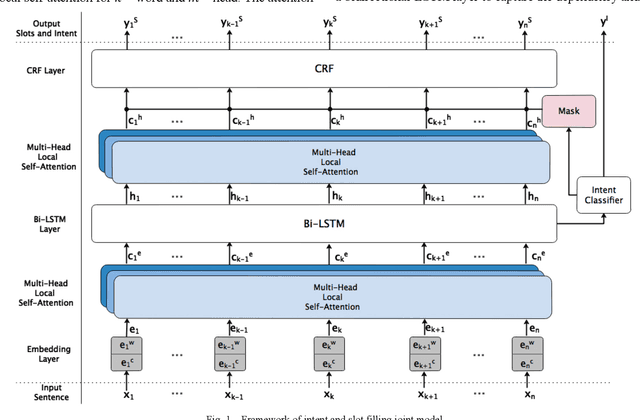
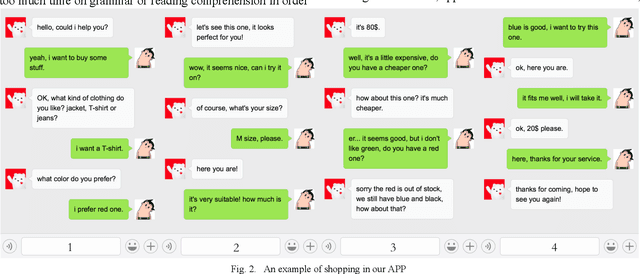
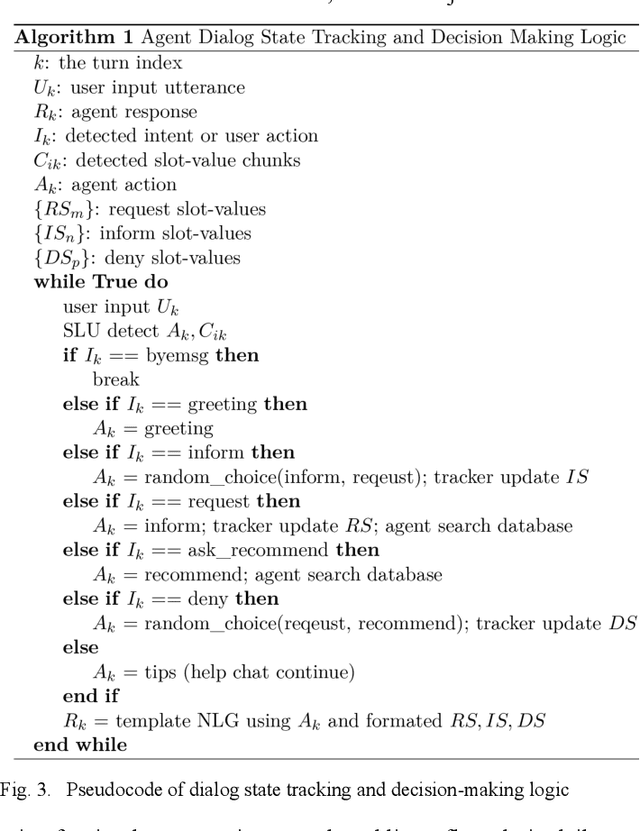
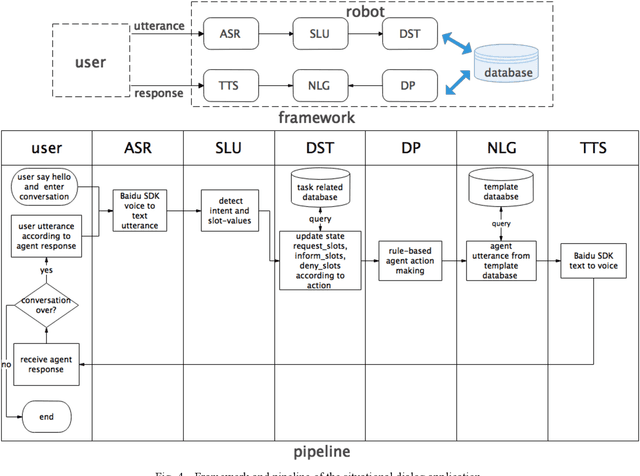
Spoken language understanding (SLU) acts as a critical component in goal-oriented dialog systems. It typically involves identifying the speakers intent and extracting semantic slots from user utterances, which are known as intent detection (ID) and slot filling (SF). SLU problem has been intensively investigated in recent years. However, these methods just constrain SF results grammatically, solve ID and SF independently, or do not fully utilize the mutual impact of the two tasks. This paper proposes a multi-head self-attention joint model with a conditional random field (CRF) layer and a prior mask. The experiments show the effectiveness of our model, as compared with state-of-the-art models. Meanwhile, online education in China has made great progress in the last few years. But there are few intelligent educational dialog applications for students to learn foreign languages. Hence, we design an intelligent dialog robot equipped with different scenario settings to help students learn communication skills.