 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynT2I-Eval: A Dynamic Evaluation Framework for Text-to-Image Models
May 07, 2026Existing text-to-image (T2I) benchmarks largely rely on fixed prompt sets, leaving them vulnerable to overfitting and benchmark contamination once publicly released and repeatedly reused. In this work, we propose DynT2I-Eval, a fully automated dynamic evaluation framework for T2I models. It constructs a structured visual semantic space from long-form descriptions, decomposing prompts into controllable dimensions (e.g., subject, logical constraint, environment, and composition). This enables the continuous generation of fresh prompts via task-specific spaces and difficulty-aware sampling. DynT2I-Eval evaluates model performance across text alignment, perceptual quality, and aesthetics. Heterogeneous outputs are unified into prompt-conditioned pairwise comparisons, allowing a dynamic scheduler, micro-batch aggregation, and weighted Bayesian updates to maintain a stable online leaderboard despite changing prompt distributions and model injection. Experiments with independently sampled prompt streams demonstrate that continually refreshed prompts provide a robust evaluation protocol, reducing the impact of prompt-set-specific tuning. Simulations and ablations further confirm that the proposed ranking framework achieves a strong balance among cold-start convergence, late-entry discovery, and long-run ranking fidelity.
RelayGR: Scaling Long-Sequence Generative Recommendation via Cross-Stage Relay-Race Inference
Jan 05, 2026Real-time recommender systems execute multi-stage cascades (retrieval, pre-processing, fine-grained ranking) under strict tail-latency SLOs, leaving only tens of milliseconds for ranking. Generative recommendation (GR) models can improve quality by consuming long user-behavior sequences, but in production their online sequence length is tightly capped by the ranking-stage P99 budget. We observe that the majority of GR tokens encode user behaviors that are independent of the item candidates, suggesting an opportunity to pre-infer a user-behavior prefix once and reuse it during ranking rather than recomputing it on the critical path. Realizing this idea at industrial scale is non-trivial: the prefix cache must survive across multiple pipeline stages before the final ranking instance is determined, the user population implies cache footprints far beyond a single device, and indiscriminate pre-inference would overload shared resources under high QPS. We present RelayGR, a production system that enables in-HBM relay-race inference for GR. RelayGR selectively pre-infers long-term user prefixes, keeps their KV caches resident in HBM over the request lifecycle, and ensures the subsequent ranking can consume them without remote fetches. RelayGR combines three techniques: 1) a sequence-aware trigger that admits only at-risk requests under a bounded cache footprint and pre-inference load, 2) an affinity-aware router that co-locates cache production and consumption by routing both the auxiliary pre-infer signal and the ranking request to the same instance, and 3) a memory-aware expander that uses server-local DRAM to capture short-term cross-request reuse while avoiding redundant reloads. We implement RelayGR on Huawei Ascend NPUs and evaluate it with real queries. Under a fixed P99 SLO, RelayGR supports up to 1.5$\times$ longer sequences and improves SLO-compliant throughput by up to 3.6$\times$.
Efficient and Effective In-context Demonstration Selection with Coreset
Nov 12, 2025In-context learning (ICL) has emerged as a powerful paradigm for Large Visual Language Models (LVLMs), enabling them to leverage a few examples directly from input contexts. However, the effectiveness of this approach is heavily reliant on the selection of demonstrations, a process that is NP-hard. Traditional strategies, including random, similarity-based sampling and infoscore-based sampling, often lead to inefficiencies or suboptimal performance, struggling to balance both efficiency and effectiveness in demonstration selection. In this paper, we propose a novel demonstration selection framework named Coreset-based Dual Retrieval (CoDR). We show that samples within a diverse subset achieve a higher expected mutual information. To implement this, we introduce a cluster-pruning method to construct a diverse coreset that aligns more effectively with the query while maintaining diversity. Additionally, we develop a dual retrieval mechanism that enhances the selection process by achieving global demonstration selection while preserving efficiency. Experimental results demonstrate that our method significantly improves the ICL performance compared to the existing strategies, providing a robust solution for effective and efficient demonstration selection.
3DGS-VBench: A Comprehensive Video Quality Evaluation Benchmark for 3DGS Compression
Aug 09, 20253D Gaussian Splatting (3DGS) enables real-time novel view synthesis with high visual fidelity, but its substantial storage requirements hinder practical deployment, prompting state-of-the-art (SOTA) 3DGS methods to incorporate compression modules. However, these 3DGS generative compression techniques introduce unique distortions lacking systematic quality assessment research. To this end, we establish 3DGS-VBench, a large-scale Video Quality Assessment (VQA) Dataset and Benchmark with 660 compressed 3DGS models and video sequences generated from 11 scenes across 6 SOTA 3DGS compression algorithms with systematically designed parameter levels. With annotations from 50 participants, we obtained MOS scores with outlier removal and validated dataset reliability. We benchmark 6 3DGS compression algorithms on storage efficiency and visual quality, and evaluate 15 quality assessment metrics across multiple paradigms. Our work enables specialized VQA model training for 3DGS, serving as a catalyst for compression and quality assessment research. The dataset is available at https://github.com/YukeXing/3DGS-VBench.
NTIRE 2025 Image Shadow Removal Challenge Report
Jun 18, 2025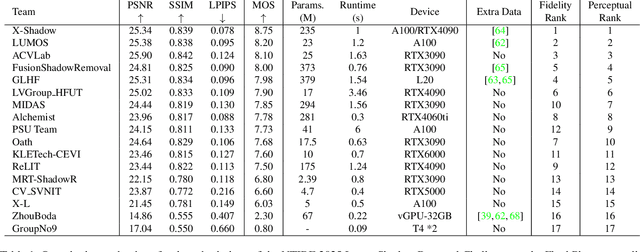

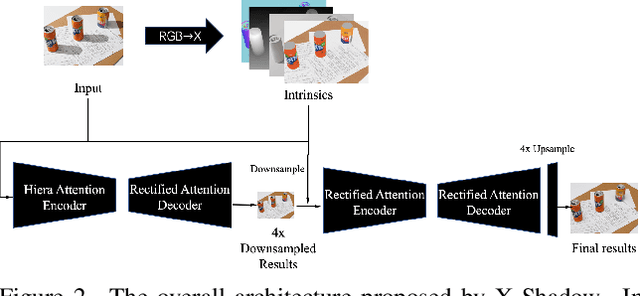
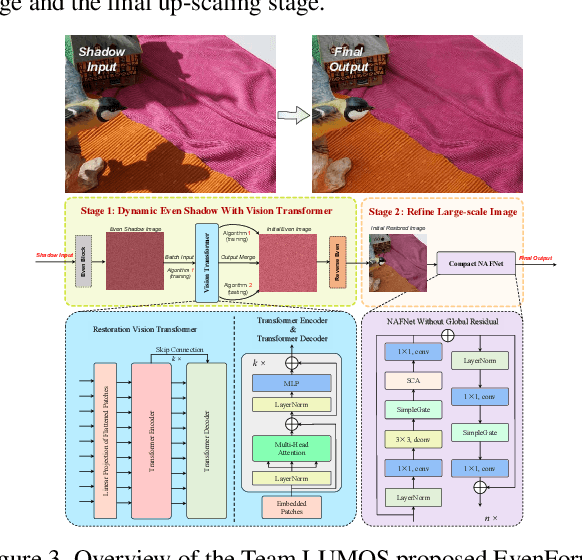
This work examines the findings of the NTIRE 2025 Shadow Removal Challenge. A total of 306 participants have registered, with 17 teams successfully submitting their solutions during the final evaluation phase. Following the last two editions, this challenge had two evaluation tracks: one focusing on reconstruction fidelity and the other on visual perception through a user study. Both tracks were evaluated with images from the WSRD+ dataset, simulating interactions between self- and cast-shadows with a large number of diverse objects, textures, and materials.
3DGS-IEval-15K: A Large-scale Image Quality Evaluation Database for 3D Gaussian-Splatting
Jun 17, 20253D Gaussian Splatting (3DGS) has emerged as a promising approach for novel view synthesis, offering real-time rendering with high visual fidelity. However, its substantial storage requirements present significant challenges for practical applications. While recent state-of-the-art (SOTA) 3DGS methods increasingly incorporate dedicated compression modules, there is a lack of a comprehensive framework to evaluate their perceptual impact. Therefore we present 3DGS-IEval-15K, the first large-scale image quality assessment (IQA) dataset specifically designed for compressed 3DGS representations. Our dataset encompasses 15,200 images rendered from 10 real-world scenes through 6 representative 3DGS algorithms at 20 strategically selected viewpoints, with different compression levels leading to various distortion effects. Through controlled subjective experiments, we collect human perception data from 60 viewers. We validate dataset quality through scene diversity and MOS distribution analysis, and establish a comprehensive benchmark with 30 representative IQA metrics covering diverse types. As the largest-scale 3DGS quality assessment dataset to date, our work provides a foundation for developing 3DGS specialized IQA metrics, and offers essential data for investigating view-dependent quality distribution patterns unique to 3DGS. The database is publicly available at https://github.com/YukeXing/3DGS-IEval-15K.
TDVE-Assessor: Benchmarking and Evaluating the Quality of Text-Driven Video Editing with LMMs
May 26, 2025Text-driven video editing is rapidly advancing, yet its rigorous evaluation remains challenging due to the absence of dedicated video quality assessment (VQA) models capable of discerning the nuances of editing quality. To address this critical gap, we introduce TDVE-DB, a large-scale benchmark dataset for text-driven video editing. TDVE-DB consists of 3,857 edited videos generated from 12 diverse models across 8 editing categories, and is annotated with 173,565 human subjective ratings along three crucial dimensions, i.e., edited video quality, editing alignment, and structural consistency. Based on TDVE-DB, we first conduct a comprehensive evaluation for the 12 state-of-the-art editing models revealing the strengths and weaknesses of current video techniques, and then benchmark existing VQA methods in the context of text-driven video editing evaluation. Building on these insights, we propose TDVE-Assessor, a novel VQA model specifically designed for text-driven video editing assessment. TDVE-Assessor integrates both spatial and temporal video features into a large language model (LLM) for rich contextual understanding to provide comprehensive quality assessment. Extensive experiments demonstrate that TDVE-Assessor substantially outperforms existing VQA models on TDVE-DB across all three evaluation dimensions, setting a new state-of-the-art. Both TDVE-DB and TDVE-Assessor will be released upon the publication.
NTIRE 2025 challenge on Text to Image Generation Model Quality Assessment
May 22, 2025This paper reports on the NTIRE 2025 challenge on Text to Image (T2I) generation model quality assessment, which will be held in conjunction with the New Trends in Image Restoration and Enhancement Workshop (NTIRE) at CVPR 2025. The aim of this challenge is to address the fine-grained quality assessment of text-to-image generation models. This challenge evaluates text-to-image models from two aspects: image-text alignment and image structural distortion detection, and is divided into the alignment track and the structural track. The alignment track uses the EvalMuse-40K, which contains around 40K AI-Generated Images (AIGIs) generated by 20 popular generative models. The alignment track has a total of 371 registered participants. A total of 1,883 submissions are received in the development phase, and 507 submissions are received in the test phase. Finally, 12 participating teams submitted their models and fact sheets. The structure track uses the EvalMuse-Structure, which contains 10,000 AI-Generated Images (AIGIs) with corresponding structural distortion mask. A total of 211 participants have registered in the structure track. A total of 1155 submissions are received in the development phase, and 487 submissions are received in the test phase. Finally, 8 participating teams submitted their models and fact sheets. Almost all methods have achieved better results than baseline methods, and the winning methods in both tracks have demonstrated superior prediction performance on T2I model quality assessment.
DexGarmentLab: Dexterous Garment Manipulation Environment with Generalizable Policy
May 19, 2025Garment manipulation is a critical challenge due to the diversity in garment categories, geometries, and deformations. Despite this, humans can effortlessly handle garments, thanks to the dexterity of our hands. However, existing research in the field has struggled to replicate this level of dexterity, primarily hindered by the lack of realistic simulations of dexterous garment manipulation. Therefore, we propose DexGarmentLab, the first environment specifically designed for dexterous (especially bimanual) garment manipulation, which features large-scale high-quality 3D assets for 15 task scenarios, and refines simulation techniques tailored for garment modeling to reduce the sim-to-real gap. Previous data collection typically relies on teleoperation or training expert reinforcement learning (RL) policies, which are labor-intensive and inefficient. In this paper, we leverage garment structural correspondence to automatically generate a dataset with diverse trajectories using only a single expert demonstration, significantly reducing manual intervention. However, even extensive demonstrations cannot cover the infinite states of garments, which necessitates the exploration of new algorithms. To improve generalization across diverse garment shapes and deformations, we propose a Hierarchical gArment-manipuLation pOlicy (HALO). It first identifies transferable affordance points to accurately locate the manipulation area, then generates generalizable trajectories to complete the task. Through extensive experiments and detailed analysis of our method and baseline, we demonstrate that HALO consistently outperforms existing methods, successfully generalizing to previously unseen instances even with significant variations in shape and deformation where others fail. Our project page is available at: https://wayrise.github.io/DexGarmentLab/.
LOVE: Benchmarking and Evaluating Text-to-Video Generation and Video-to-Text Interpretation
May 17, 2025Recent advancements in large multimodal models (LMMs) have driven substantial progress in both text-to-video (T2V) generation and video-to-text (V2T) interpretation tasks. However, current AI-generated videos (AIGVs) still exhibit limitations in terms of perceptual quality and text-video alignment. Therefore, a reliable and scalable automatic model for AIGV evaluation is desirable, which heavily relies on the scale and quality of human annotations. To this end, we present AIGVE-60K, a comprehensive dataset and benchmark for AI-Generated Video Evaluation, which features (i) comprehensive tasks, encompassing 3,050 extensive prompts across 20 fine-grained task dimensions, (ii) the largest human annotations, including 120K mean-opinion scores (MOSs) and 60K question-answering (QA) pairs annotated on 58,500 videos generated from 30 T2V models, and (iii) bidirectional benchmarking and evaluating for both T2V generation and V2T interpretation capabilities. Based on AIGVE-60K, we propose LOVE, a LMM-based metric for AIGV Evaluation from multiple dimensions including perceptual preference, text-video correspondence, and task-specific accuracy in terms of both instance level and model level. Comprehensive experiments demonstrate that LOVE not only achieves state-of-the-art performance on the AIGVE-60K dataset, but also generalizes effectively to a wide range of other AIGV evaluation benchmarks. These findings highlight the significance of the AIGVE-60K dataset. Database and codes are anonymously available at https://github.com/IntMeGroup/LOVE.