 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Robotic Policy Learning via Latent Space Backward Planning
May 11, 2025Current robotic planning methods often rely on predicting multi-frame images with full pixel details. While this fine-grained approach can serve as a generic world model, it introduces two significant challenges for downstream policy learning: substantial computational costs that hinder real-time deployment, and accumulated inaccuracies that can mislead action extraction. Planning with coarse-grained subgoals partially alleviates efficiency issues. However, their forward planning schemes can still result in off-task predictions due to accumulation errors, leading to misalignment with long-term goals. This raises a critical question: Can robotic planning be both efficient and accurate enough for real-time control in long-horizon, multi-stage tasks? To address this, we propose a Latent Space Backward Planning scheme (LBP), which begins by grounding the task into final latent goals, followed by recursively predicting intermediate subgoals closer to the current state. The grounded final goal enables backward subgoal planning to always remain aware of task completion, facilitating on-task prediction along the entire planning horizon. The subgoal-conditioned policy incorporates a learnable token to summarize the subgoal sequences and determines how each subgoal guides action extraction. Through extensive simulation and real-robot long-horizon experiments, we show that LBP outperforms existing fine-grained and forward planning methods, achieving SOTA performance. Project Page: https://lbp-authors.github.io
Skill Expansion and Composition in Parameter Space
Feb 09, 2025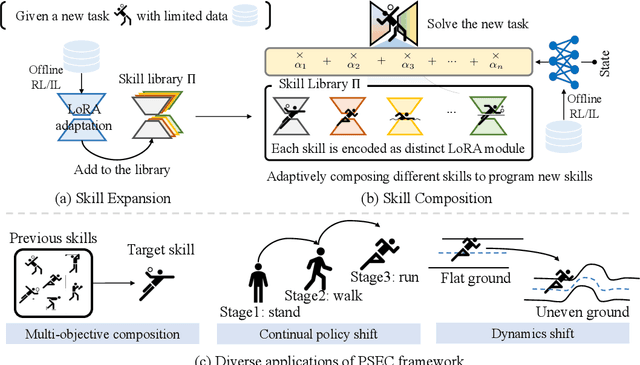
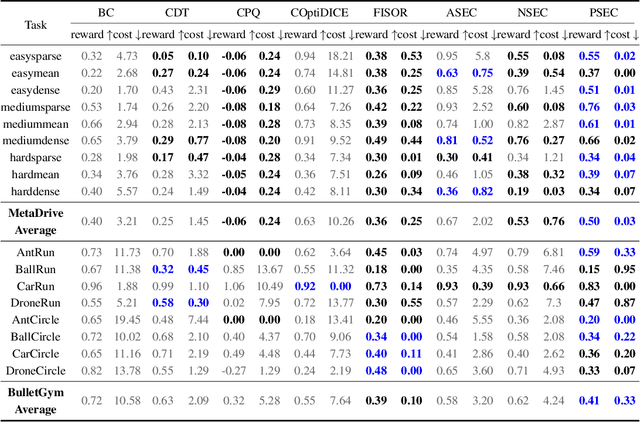
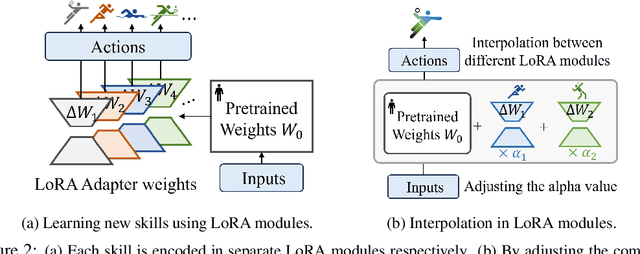
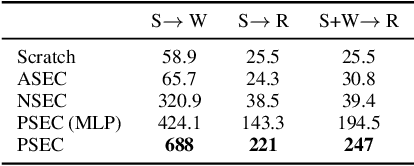
Humans excel at reusing prior knowledge to address new challenges and developing skills while solving problems. This paradigm becomes increasingly popular in the development of autonomous agents, as it develops systems that can self-evolve in response to new challenges like human beings. However, previous methods suffer from limited training efficiency when expanding new skills and fail to fully leverage prior knowledge to facilitate new task learning. In this paper, we propose Parametric Skill Expansion and Composition (PSEC), a new framework designed to iteratively evolve the agents' capabilities and efficiently address new challenges by maintaining a manageable skill library. This library can progressively integrate skill primitives as plug-and-play Low-Rank Adaptation (LoRA) modules in parameter-efficient finetuning, facilitating efficient and flexible skill expansion. This structure also enables the direct skill compositions in parameter space by merging LoRA modules that encode different skills, leveraging shared information across skills to effectively program new skills. Based on this, we propose a context-aware module to dynamically activate different skills to collaboratively handle new tasks. Empowering diverse applications including multi-objective composition, dynamics shift, and continual policy shift, the results on D4RL, DSRL benchmarks, and the DeepMind Control Suite show that PSEC exhibits superior capacity to leverage prior knowledge to efficiently tackle new challenges, as well as expand its skill libraries to evolve the capabilities. Project website: https://ltlhuuu.github.io/PSEC/.
Are Expressive Models Truly Necessary for Offline RL?
Dec 15, 2024



Among various branches of offline reinforcement learning (RL) methods, goal-conditioned supervised learning (GCSL) has gained increasing popularity as it formulates the offline RL problem as a sequential modeling task, therefore bypassing the notoriously difficult credit assignment challenge of value learning in conventional RL paradigm. Sequential modeling, however, requires capturing accurate dynamics across long horizons in trajectory data to ensure reasonable policy performance. To meet this requirement, leveraging large, expressive models has become a popular choice in recent literature, which, however, comes at the cost of significantly increased computation and inference latency. Contradictory yet promising, we reveal that lightweight models as simple as shallow 2-layer MLPs, can also enjoy accurate dynamics consistency and significantly reduced sequential modeling errors against large expressive models by adopting a simple recursive planning scheme: recursively planning coarse-grained future sub-goals based on current and target information, and then executes the action with a goal-conditioned policy learned from data rela-beled with these sub-goal ground truths. We term our method Recursive Skip-Step Planning (RSP). Simple yet effective, RSP enjoys great efficiency improvements thanks to its lightweight structure, and substantially outperforms existing methods, reaching new SOTA performances on the D4RL benchmark, especially in multi-stage long-horizon tasks.
xTED: Cross-Domain Policy Adaptation via Diffusion-Based Trajectory Editing
Sep 13, 2024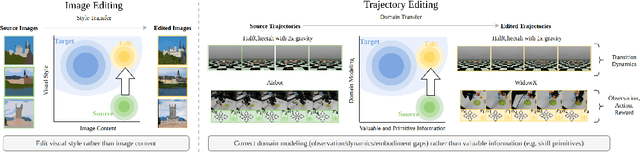
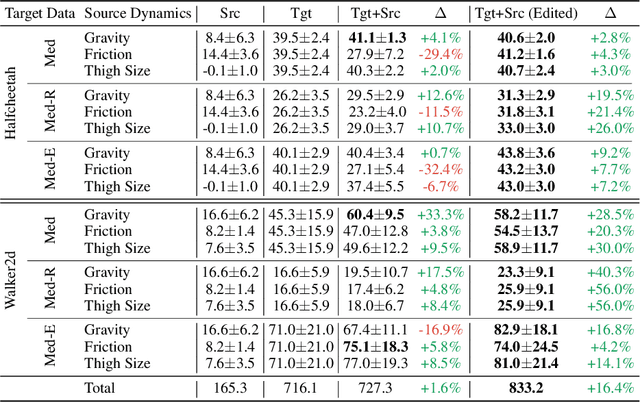
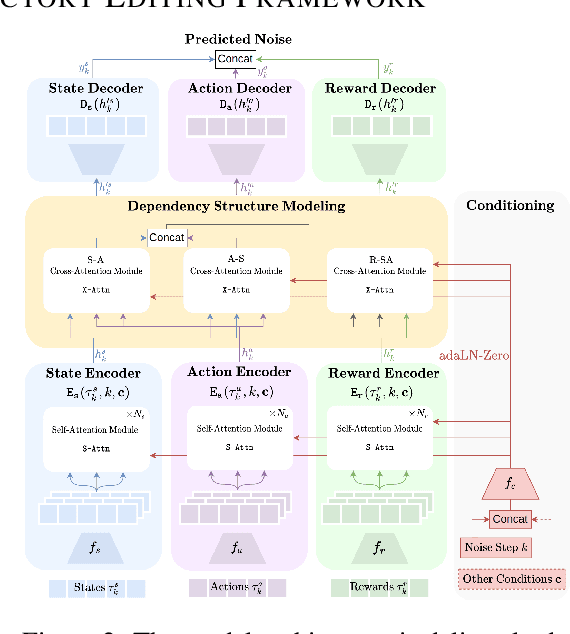

Reusing pre-collected data from different domains is an attractive solution in decision-making tasks where the accessible data is insufficient in the target domain but relatively abundant in other related domains. Existing cross-domain policy transfer methods mostly aim at learning domain correspondences or corrections to facilitate policy learning, which requires learning domain/task-specific model components, representations, or policies that are inflexible or not fully reusable to accommodate arbitrary domains and tasks. These issues make us wonder: can we directly bridge the domain gap at the data (trajectory) level, instead of devising complicated, domain-specific policy transfer models? In this study, we propose a Cross-Domain Trajectory EDiting (xTED) framework with a new diffusion transformer model (Decision Diffusion Transformer, DDiT) that captures the trajectory distribution from the target dataset as a prior. The proposed diffusion transformer backbone captures the intricate dependencies among state, action, and reward sequences, as well as the transition dynamics within the target data trajectories. With the above pre-trained diffusion prior, source data trajectories with domain gaps can be transformed into edited trajectories that closely resemble the target data distribution through the diffusion-based editing process, which implicitly corrects the underlying domain gaps, enhancing the state realism and dynamics reliability in source trajectory data, while enabling flexible choices of downstream policy learning methods. Despite its simplicity, xTED demonstrates superior performance against other baselines in extensive simulation and real-robot experiments.
Multi-Objective Trajectory Planning with Dual-Encoder
Mar 26, 2024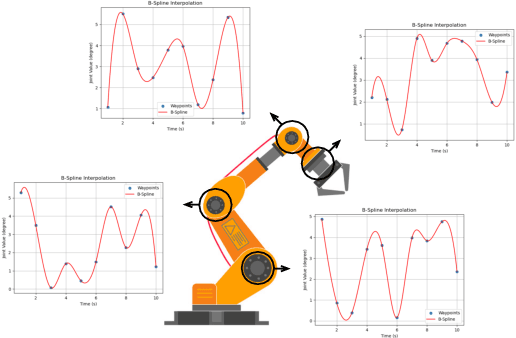



Time-jerk optimal trajectory planning is crucial in advancing robotic arms' performance in dynamic tasks. Traditional methods rely on solving complex nonlinear programming problems, bringing significant delays in generating optimized trajectories. In this paper, we propose a two-stage approach to accelerate time-jerk optimal trajectory planning. Firstly, we introduce a dual-encoder based transformer model to establish a good preliminary trajectory. This trajectory is subsequently refined through sequential quadratic programming to improve its optimality and robustness. Our approach outperforms the state-of-the-art by up to 79.72\% in reducing trajectory planning time. Compared with existing methods, our method shrinks the optimality gap with the objective function value decreasing by up to 29.9\%.
DecisionNCE: Embodied Multimodal Representations via Implicit Preference Learning
Feb 28, 2024Multimodal pretraining has emerged as an effective strategy for the trinity of goals of representation learning in autonomous robots: 1) extracting both local and global task progression information; 2) enforcing temporal consistency of visual representation; 3) capturing trajectory-level language grounding. Most existing methods approach these via separate objectives, which often reach sub-optimal solutions. In this paper, we propose a universal unified objective that can simultaneously extract meaningful task progression information from image sequences and seamlessly align them with language instructions. We discover that via implicit preferences, where a visual trajectory inherently aligns better with its corresponding language instruction than mismatched pairs, the popular Bradley-Terry model can transform into representation learning through proper reward reparameterizations. The resulted framework, DecisionNCE, mirrors an InfoNCE-style objective but is distinctively tailored for decision-making tasks, providing an embodied representation learning framework that elegantly extracts both local and global task progression features, with temporal consistency enforced through implicit time contrastive learning, while ensuring trajectory-level instruction grounding via multimodal joint encoding. Evaluation on both simulated and real robots demonstrates that DecisionNCE effectively facilitates diverse downstream policy learning tasks, offering a versatile solution for unified representation and reward learning. Project Page: https://2toinf.github.io/DecisionNCE/
A Comprehensive Survey of Cross-Domain Policy Transfer for Embodied Agents
Feb 07, 2024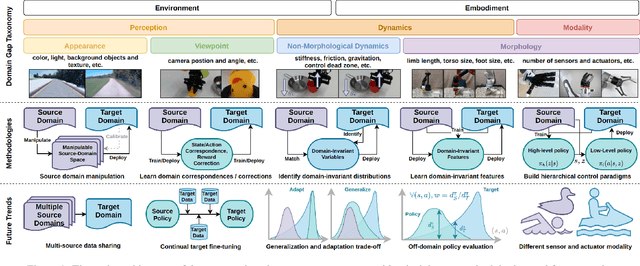
The burgeoning fields of robot learning and embodied AI have triggered an increasing demand for large quantities of data. However, collecting sufficient unbiased data from the target domain remains a challenge due to costly data collection processes and stringent safety requirements. Consequently, researchers often resort to data from easily accessible source domains, such as simulation and laboratory environments, for cost-effective data acquisition and rapid model iteration. Nevertheless, the environments and embodiments of these source domains can be quite different from their target domain counterparts, underscoring the need for effective cross-domain policy transfer approaches. In this paper, we conduct a systematic review of existing cross-domain policy transfer methods. Through a nuanced categorization of domain gaps, we encapsulate the overarching insights and design considerations of each problem setting. We also provide a high-level discussion about the key methodologies used in cross-domain policy transfer problems. Lastly, we summarize the open challenges that lie beyond the capabilities of current paradigms and discuss potential future directions in this field.
Stackelberg Driver Model for Continual Policy Improvement in Scenario-Based Closed-Loop Autonomous Driving
Sep 25, 2023The deployment of autonomous vehicles (AVs) has faced hurdles due to the dominance of rare but critical corner cases within the long-tail distribution of driving scenarios, which negatively affects their overall performance. To address this challenge, adversarial generation methods have emerged as a class of efficient approaches to synthesize safety-critical scenarios for AV testing. However, these generated scenarios are often underutilized for AV training, resulting in the potential for continual AV policy improvement remaining untapped, along with a deficiency in the closed-loop design needed to achieve it. Therefore, we tailor the Stackelberg Driver Model (SDM) to accurately characterize the hierarchical nature of vehicle interaction dynamics, facilitating iterative improvement by engaging background vehicles (BVs) and AV in a sequential game-like interaction paradigm. With AV acting as the leader and BVs as followers, this leader-follower modeling ensures that AV would consistently refine its policy, always taking into account the additional information that BVs play the best response to challenge AV. Extensive experiments have shown that our algorithm exhibits superior performance compared to several baselines especially in higher dimensional scenarios, leading to substantial advancements in AV capabilities while continually generating progressively challenging scenarios.
Continual Driving Policy Optimization with Closed-Loop Individualized Curricula
Sep 25, 2023The safety of autonomous vehicles (AV) has been a long-standing top concern, stemming from the absence of rare and safety-critical scenarios in the long-tail naturalistic driving distribution. To tackle this challenge, a surge of research in scenario-based autonomous driving has emerged, with a focus on generating high-risk driving scenarios and applying them to conduct safety-critical testing of AV models. However, limited work has been explored on the reuse of these extensive scenarios to iteratively improve AV models. Moreover, it remains intractable and challenging to filter through gigantic scenario libraries collected from other AV models with distinct behaviors, attempting to extract transferable information for current AV improvement. Therefore, we develop a continual driving policy optimization framework featuring Closed-Loop Individualized Curricula (CLIC), which we factorize into a set of standardized sub-modules for flexible implementation choices: AV Evaluation, Scenario Selection, and AV Training. CLIC frames AV Evaluation as a collision prediction task, where it estimates the chance of AV failures in these scenarios at each iteration. Subsequently, by re-sampling from historical scenarios based on these failure probabilities, CLIC tailors individualized curricula for downstream training, aligning them with the evaluated capability of AV. Accordingly, CLIC not only maximizes the utilization of the vast pre-collected scenario library for closed-loop driving policy optimization but also facilitates AV improvement by individualizing its training with more challenging cases out of those poorly organized scenarios. Experimental results clearly indicate that CLIC surpasses other curriculum-based training strategies, showing substantial improvement in managing risky scenarios, while still maintaining proficiency in handling simpler cases.
H2O+: An Improved Framework for Hybrid Offline-and-Online RL with Dynamics Gaps
Sep 22, 2023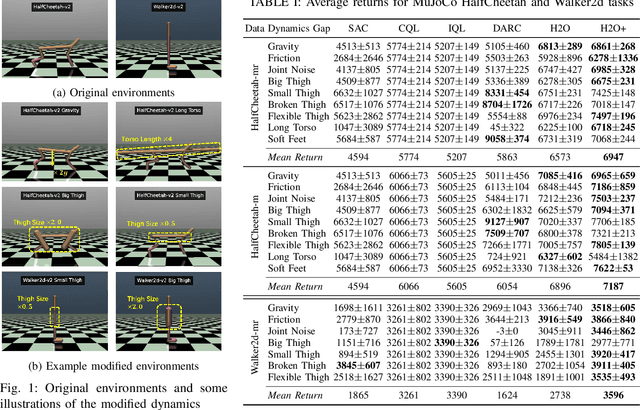
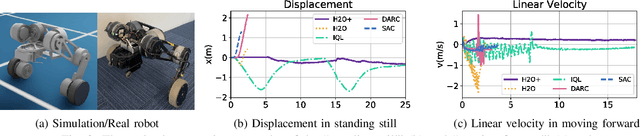
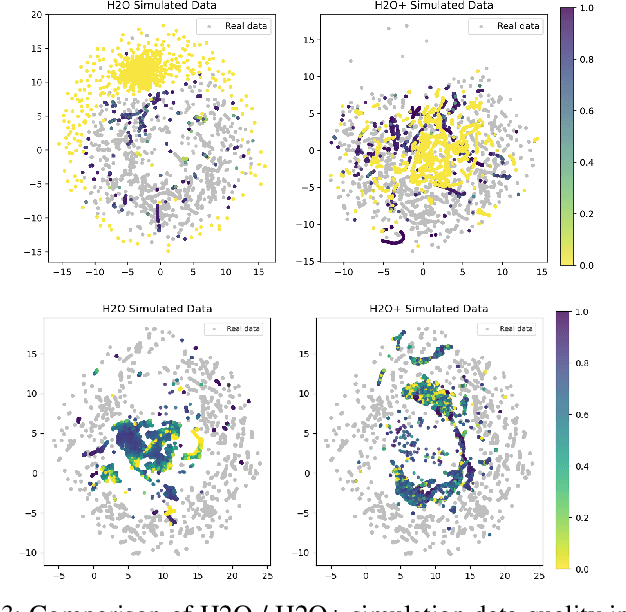
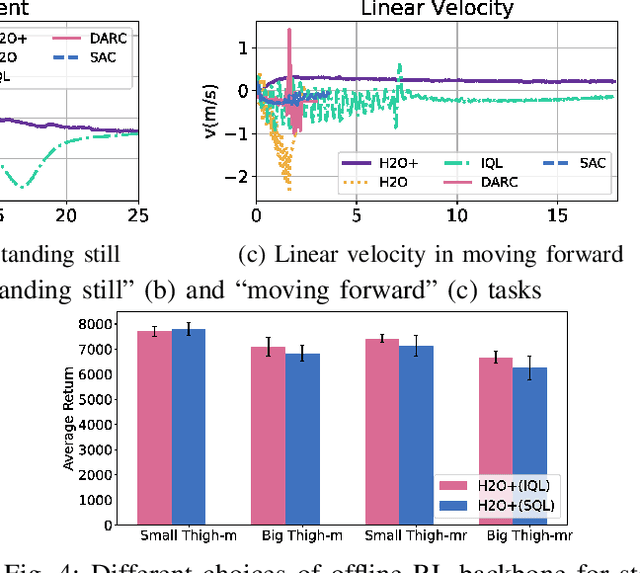
Solving real-world complex tasks using reinforcement learning (RL) without high-fidelity simulation environments or large amounts of offline data can be quite challenging. Online RL agents trained in imperfect simulation environments can suffer from severe sim-to-real issues. Offline RL approaches although bypass the need for simulators, often pose demanding requirements on the size and quality of the offline datasets. The recently emerged hybrid offline-and-online RL provides an attractive framework that enables joint use of limited offline data and imperfect simulator for transferable policy learning. In this paper, we develop a new algorithm, called H2O+, which offers great flexibility to bridge various choices of offline and online learning methods, while also accounting for dynamics gaps between the real and simulation environment. Through extensive simulation and real-world robotics experiments, we demonstrate superior performance and flexibility over advanced cross-domain online and offline RL algorithms.