 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Objective Trajectory Planning with Dual-Encoder
Mar 26, 2024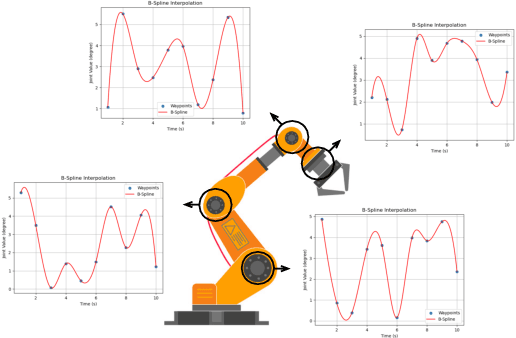



Time-jerk optimal trajectory planning is crucial in advancing robotic arms' performance in dynamic tasks. Traditional methods rely on solving complex nonlinear programming problems, bringing significant delays in generating optimized trajectories. In this paper, we propose a two-stage approach to accelerate time-jerk optimal trajectory planning. Firstly, we introduce a dual-encoder based transformer model to establish a good preliminary trajectory. This trajectory is subsequently refined through sequential quadratic programming to improve its optimality and robustness. Our approach outperforms the state-of-the-art by up to 79.72\% in reducing trajectory planning time. Compared with existing methods, our method shrinks the optimality gap with the objective function value decreasing by up to 29.9\%.
Dynamic DNN Decomposition for Lossless Synergistic Inference
Jan 15, 2021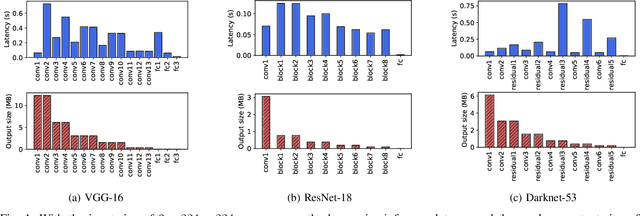


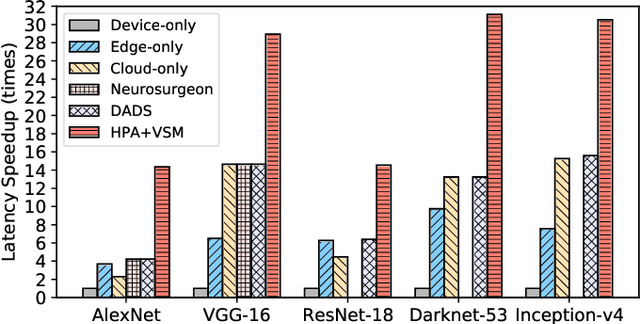
Deep neural networks (DNNs) sustain high performance in today's data processing applications. DNN inference is resource-intensive thus is difficult to fit into a mobile device. An alternative is to offload the DNN inference to a cloud server. However, such an approach requires heavy raw data transmission between the mobile device and the cloud server, which is not suitable for mission-critical and privacy-sensitive applications such as autopilot. To solve this problem, recent advances unleash DNN services using the edge computing paradigm. The existing approaches split a DNN into two parts and deploy the two partitions to computation nodes at two edge computing tiers. Nonetheless, these methods overlook collaborative device-edge-cloud computation resources. Besides, previous algorithms demand the whole DNN re-partitioning to adapt to computation resource changes and network dynamics. Moreover, for resource-demanding convolutional layers, prior works do not give a parallel processing strategy without loss of accuracy at the edge side. To tackle these issues, we propose D3, a dynamic DNN decomposition system for synergistic inference without precision loss. The proposed system introduces a heuristic algorithm named horizontal partition algorithm to split a DNN into three parts. The algorithm can partially adjust the partitions at run time according to processing time and network conditions. At the edge side, a vertical separation module separates feature maps into tiles that can be independently run on different edge nodes in parallel. Extensive quantitative evaluation of five popular DNNs illustrates that D3 outperforms the state-of-the-art counterparts up to 3.4 times in end-to-end DNN inference time and reduces backbone network communication overhead up to 3.68 times.