 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLTPNet Integration of Deep Learning and Environmental Decision Support Systems for Renewable Energy Demand Forecasting
Oct 20, 2024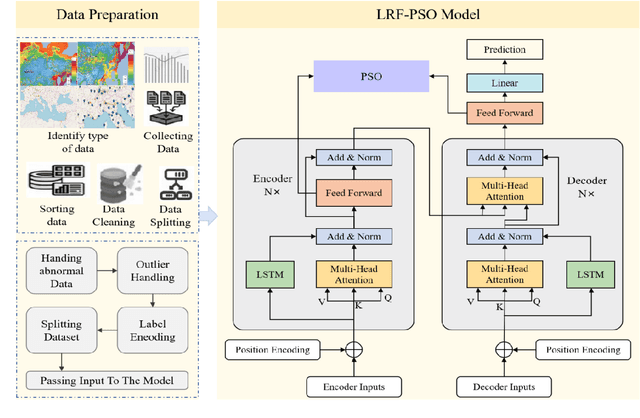
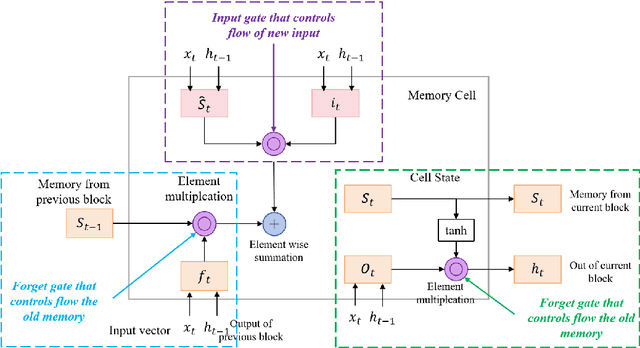
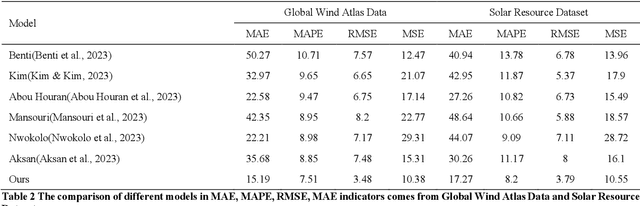
Against the backdrop of increasingly severe global environmental changes, accurately predicting and meeting renewable energy demands has become a key challenge for sustainable business development. Traditional energy demand forecasting methods often struggle with complex data processing and low prediction accuracy. To address these issues, this paper introduces a novel approach that combines deep learning techniques with environmental decision support systems. The model integrates advanced deep learning techniques, including LSTM and Transformer, and PSO algorithm for parameter optimization, significantly enhancing predictive performance and practical applicability. Results show that our model achieves substantial improvements across various metrics, including a 30% reduction in MAE, a 20% decrease in MAPE, a 25% drop in RMSE, and a 35% decline in MSE. These results validate the model's effectiveness and reliability in renewable energy demand forecasting. This research provides valuable insights for applying deep learning in environmental decision support systems.
BCOT: A Markerless High-Precision 3D Object Tracking Benchmark
Mar 25, 2022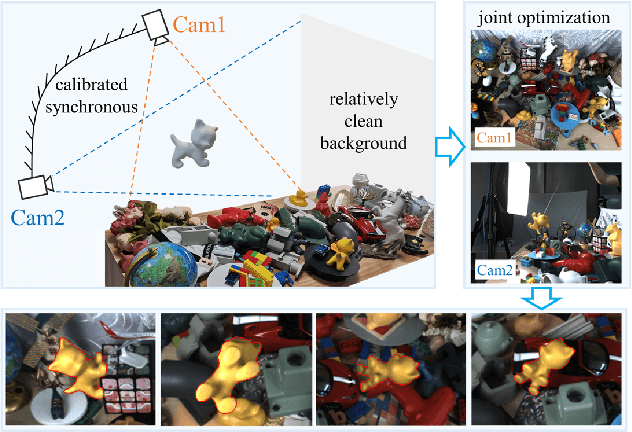
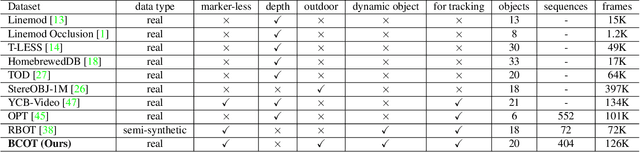


Template-based 3D object tracking still lacks a high-precision benchmark of real scenes due to the difficulty of annotating the accurate 3D poses of real moving video objects without using markers. In this paper, we present a multi-view approach to estimate the accurate 3D poses of real moving objects, and then use binocular data to construct a new benchmark for monocular textureless 3D object tracking. The proposed method requires no markers, and the cameras only need to be synchronous, relatively fixed as cross-view and calibrated. Based on our object-centered model, we jointly optimize the object pose by minimizing shape re-projection constraints in all views, which greatly improves the accuracy compared with the single-view approach, and is even more accurate than the depth-based method. Our new benchmark dataset contains 20 textureless objects, 22 scenes, 404 video sequences and 126K images captured in real scenes. The annotation error is guaranteed to be less than 2mm, according to both theoretical analysis and validation experiments. We re-evaluate the state-of-the-art 3D object tracking methods with our dataset, reporting their performance ranking in real scenes. Our BCOT benchmark and code can be found at https://ar3dv.github.io/BCOT-Benchmark/.
Dynamic DNN Decomposition for Lossless Synergistic Inference
Jan 15, 2021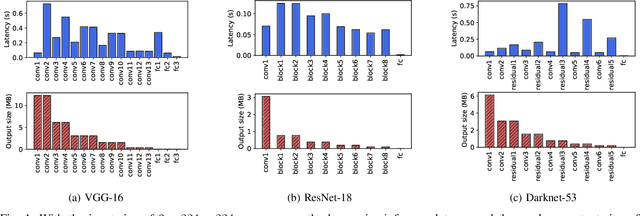


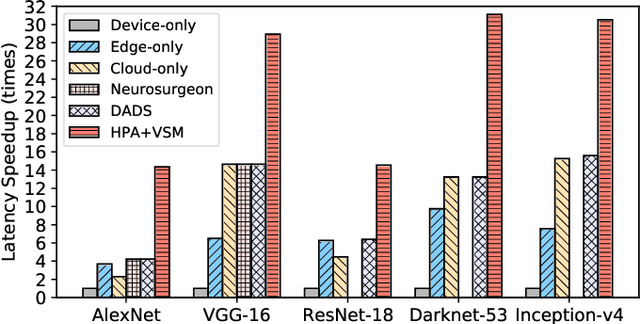
Deep neural networks (DNNs) sustain high performance in today's data processing applications. DNN inference is resource-intensive thus is difficult to fit into a mobile device. An alternative is to offload the DNN inference to a cloud server. However, such an approach requires heavy raw data transmission between the mobile device and the cloud server, which is not suitable for mission-critical and privacy-sensitive applications such as autopilot. To solve this problem, recent advances unleash DNN services using the edge computing paradigm. The existing approaches split a DNN into two parts and deploy the two partitions to computation nodes at two edge computing tiers. Nonetheless, these methods overlook collaborative device-edge-cloud computation resources. Besides, previous algorithms demand the whole DNN re-partitioning to adapt to computation resource changes and network dynamics. Moreover, for resource-demanding convolutional layers, prior works do not give a parallel processing strategy without loss of accuracy at the edge side. To tackle these issues, we propose D3, a dynamic DNN decomposition system for synergistic inference without precision loss. The proposed system introduces a heuristic algorithm named horizontal partition algorithm to split a DNN into three parts. The algorithm can partially adjust the partitions at run time according to processing time and network conditions. At the edge side, a vertical separation module separates feature maps into tiles that can be independently run on different edge nodes in parallel. Extensive quantitative evaluation of five popular DNNs illustrates that D3 outperforms the state-of-the-art counterparts up to 3.4 times in end-to-end DNN inference time and reduces backbone network communication overhead up to 3.68 times.