 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeedance 2.0: Advancing Video Generation for World Complexity
Apr 15, 2026Seedance 2.0 is a new native multi-modal audio-video generation model, officially released in China in early February 2026. Compared with its predecessors, Seedance 1.0 and 1.5 Pro, Seedance 2.0 adopts a unified, highly efficient, and large-scale architecture for multi-modal audio-video joint generation. This allows it to support four input modalities: text, image, audio, and video, by integrating one of the most comprehensive suites of multi-modal content reference and editing capabilities available in the industry to date. It delivers substantial, well-rounded improvements across all key sub-dimensions of video and audio generation. In both expert evaluations and public user tests, the model has demonstrated performance on par with the leading levels in the field. Seedance 2.0 supports direct generation of audio-video content with durations ranging from 4 to 15 seconds, with native output resolutions of 480p and 720p. For multi-modal inputs as reference, its current open platform supports up to 3 video clips, 9 images, and 3 audio clips. In addition, we provide Seedance 2.0 Fast version, an accelerated variant of Seedance 2.0 designed to boost generation speed for low-latency scenarios. Seedance 2.0 has delivered significant improvements to its foundational generation capabilities and multi-modal generation performance, bringing an enhanced creative experience for end users.
Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model
Dec 23, 2025Recent strides in video generation have paved the way for unified audio-visual generation. In this work, we present Seedance 1.5 pro, a foundational model engineered specifically for native, joint audio-video generation. Leveraging a dual-branch Diffusion Transformer architecture, the model integrates a cross-modal joint module with a specialized multi-stage data pipeline, achieving exceptional audio-visual synchronization and superior generation quality. To ensure practical utility, we implement meticulous post-training optimizations, including Supervised Fine-Tuning (SFT) on high-quality datasets and Reinforcement Learning from Human Feedback (RLHF) with multi-dimensional reward models. Furthermore, we introduce an acceleration framework that boosts inference speed by over 10X. Seedance 1.5 pro distinguishes itself through precise multilingual and dialect lip-syncing, dynamic cinematic camera control, and enhanced narrative coherence, positioning it as a robust engine for professional-grade content creation. Seedance 1.5 pro is now accessible on Volcano Engine at https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?type=GenVideo.
Seed1.5-VL Technical Report
May 11, 2025



We present Seed1.5-VL, a vision-language foundation model designed to advance general-purpose multimodal understanding and reasoning. Seed1.5-VL is composed with a 532M-parameter vision encoder and a Mixture-of-Experts (MoE) LLM of 20B active parameters. Despite its relatively compact architecture, it delivers strong performance across a wide spectrum of public VLM benchmarks and internal evaluation suites, achieving the state-of-the-art performance on 38 out of 60 public benchmarks. Moreover, in agent-centric tasks such as GUI control and gameplay, Seed1.5-VL outperforms leading multimodal systems, including OpenAI CUA and Claude 3.7. Beyond visual and video understanding, it also demonstrates strong reasoning abilities, making it particularly effective for multimodal reasoning challenges such as visual puzzles. We believe these capabilities will empower broader applications across diverse tasks. In this report, we mainly provide a comprehensive review of our experiences in building Seed1.5-VL across model design, data construction, and training at various stages, hoping that this report can inspire further research. Seed1.5-VL is now accessible at https://www.volcengine.com/ (Volcano Engine Model ID: doubao-1-5-thinking-vision-pro-250428)
StreamChat: Chatting with Streaming Video
Dec 11, 2024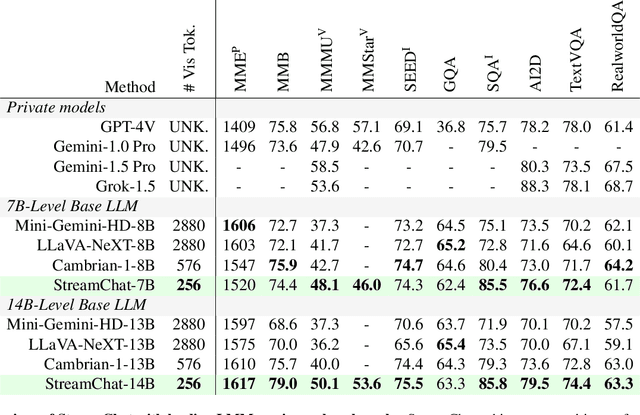
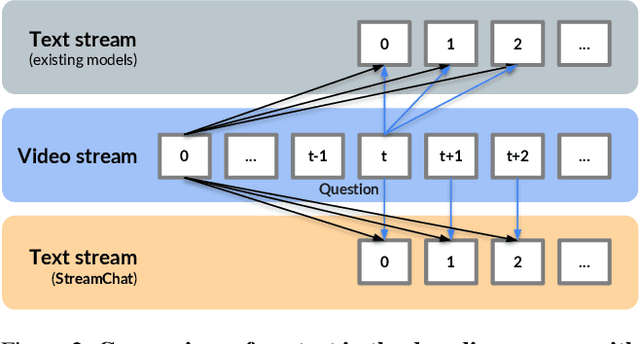

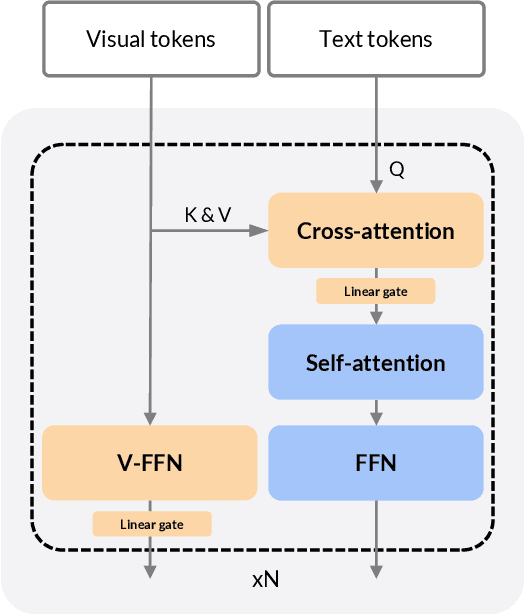
This paper presents StreamChat, a novel approach that enhances the interaction capabilities of Large Multimodal Models (LMMs) with streaming video content. In streaming interaction scenarios, existing methods rely solely on visual information available at the moment a question is posed, resulting in significant delays as the model remains unaware of subsequent changes in the streaming video. StreamChat addresses this limitation by innovatively updating the visual context at each decoding step, ensuring that the model utilizes up-to-date video content throughout the decoding process. Additionally, we introduce a flexible and efficient crossattention-based architecture to process dynamic streaming inputs while maintaining inference efficiency for streaming interactions. Furthermore, we construct a new dense instruction dataset to facilitate the training of streaming interaction models, complemented by a parallel 3D-RoPE mechanism that encodes the relative temporal information of visual and text tokens. Experimental results demonstrate that StreamChat achieves competitive performance on established image and video benchmarks and exhibits superior capabilities in streaming interaction scenarios compared to state-of-the-art video LMM.
MM-Instruct: Generated Visual Instructions for Large Multimodal Model Alignment
Jun 28, 2024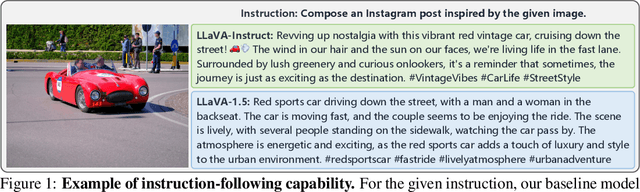
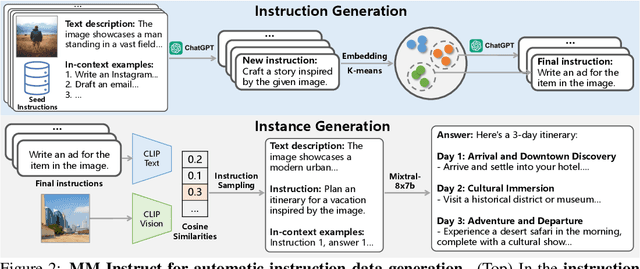
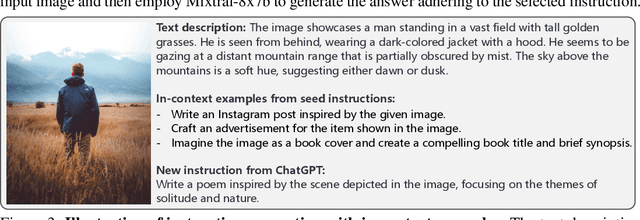
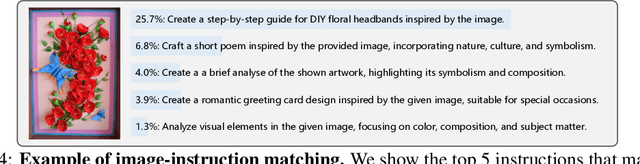
This paper introduces MM-Instruct, a large-scale dataset of diverse and high-quality visual instruction data designed to enhance the instruction-following capabilities of large multimodal models (LMMs). While existing visual instruction datasets often focus on question-answering, they struggle to generalize to broader application scenarios such as creative writing, summarization, or image analysis. To address these limitations, we propose a novel approach to constructing MM-Instruct that leverages the strong instruction-following capabilities of existing LLMs to generate novel visual instruction data from large-scale but conventional image captioning datasets. MM-Instruct first leverages ChatGPT to automatically generate diverse instructions from a small set of seed instructions through augmenting and summarization. It then matches these instructions with images and uses an open-sourced large language model (LLM) to generate coherent answers to the instruction-image pairs. The LLM is grounded by the detailed text descriptions of images in the whole answer generation process to guarantee the alignment of the instruction data. Moreover, we introduce a benchmark based on the generated instruction data to evaluate the instruction-following capabilities of existing LMMs. We demonstrate the effectiveness of MM-Instruct by training a LLaVA-1.5 model on the generated data, denoted as LLaVA-Instruct, which exhibits significant improvements in instruction-following capabilities compared to LLaVA-1.5 models. The MM-Instruct dataset, benchmark, and pre-trained models are available at https://github.com/jihaonew/MM-Instruct.
Instruction-Guided Visual Masking
May 30, 2024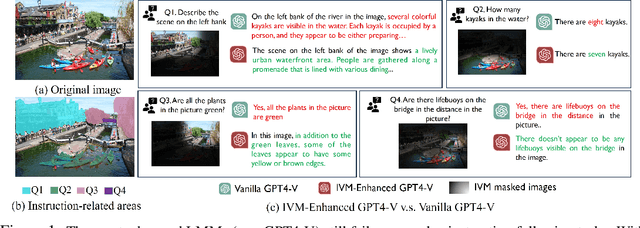
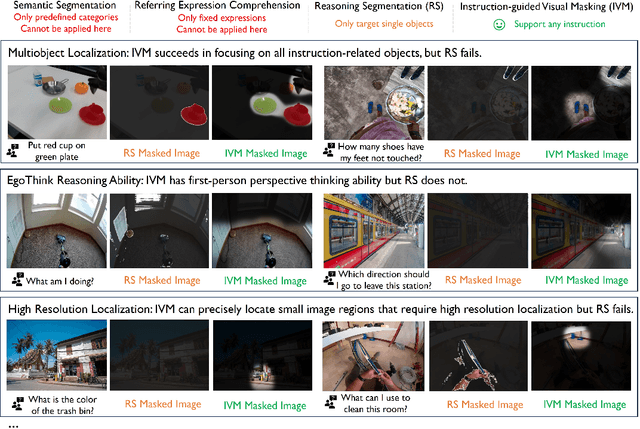
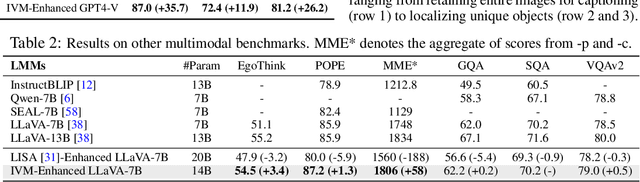
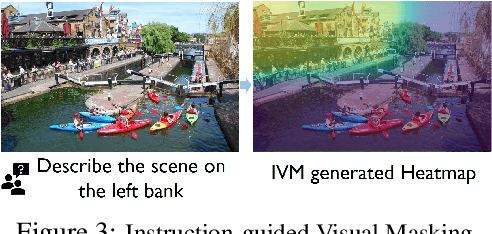
Instruction following is crucial in contemporary LLM. However, when extended to multimodal setting, it often suffers from misalignment between specific textual instruction and targeted local region of an image. To achieve more accurate and nuanced multimodal instruction following, we introduce Instruction-guided Visual Masking (IVM), a new versatile visual grounding model that is compatible with diverse multimodal models, such as LMM and robot model. By constructing visual masks for instruction-irrelevant regions, IVM-enhanced multimodal models can effectively focus on task-relevant image regions to better align with complex instructions. Specifically, we design a visual masking data generation pipeline and create an IVM-Mix-1M dataset with 1 million image-instruction pairs. We further introduce a new learning technique, Discriminator Weighted Supervised Learning (DWSL) for preferential IVM training that prioritizes high-quality data samples. Experimental results on generic multimodal tasks such as VQA and embodied robotic control demonstrate the versatility of IVM, which as a plug-and-play tool, significantly boosts the performance of diverse multimodal models, yielding new state-of-the-art results across challenging multimodal benchmarks. Code is available at https://github.com/2toinf/IVM.
Enhancing Vision-Language Model with Unmasked Token Alignment
May 29, 2024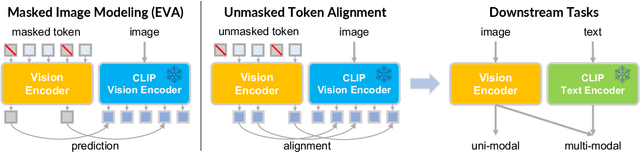
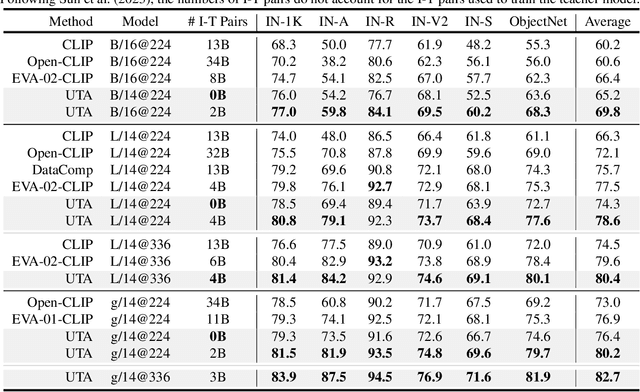
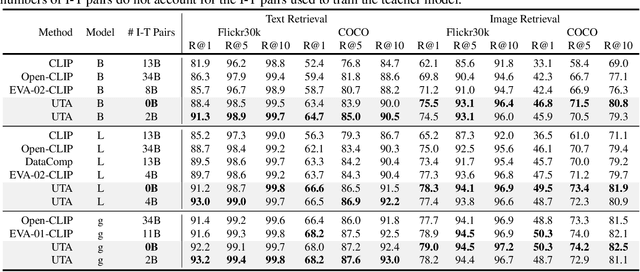
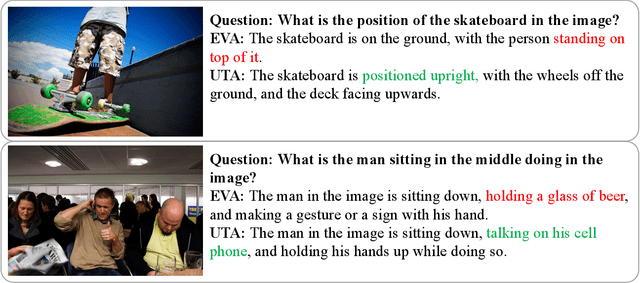
Contrastive pre-training on image-text pairs, exemplified by CLIP, becomes a standard technique for learning multi-modal visual-language representations. Although CLIP has demonstrated remarkable performance, training it from scratch on noisy web-scale datasets is computationally demanding. On the other hand, mask-then-predict pre-training approaches, like Masked Image Modeling (MIM), offer efficient self-supervised learning for single-modal representations. This paper introduces Unmasked Token Alignment (UTA), a method that leverages existing CLIP models to further enhance its vision-language representations. UTA trains a Vision Transformer (ViT) by aligning unmasked visual tokens to the corresponding image tokens from a frozen CLIP vision encoder, which automatically aligns the ViT model with the CLIP text encoder. The pre-trained ViT can be directly applied for zero-shot evaluation even without training on image-text pairs. Compared to MIM approaches, UTA does not suffer from training-finetuning inconsistency and is much more training-efficient by avoiding using the extra [MASK] tokens. Extensive experimental results demonstrate that UTA can enhance CLIP models and outperform existing MIM methods on various uni- and multi-modal benchmarks. Code and models are available at https://github.com/jihaonew/UTA.
GLID: Pre-training a Generalist Encoder-Decoder Vision Model
Apr 11, 2024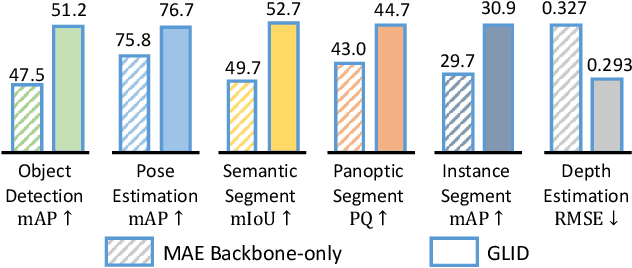
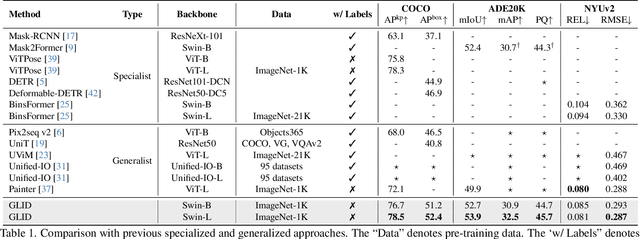
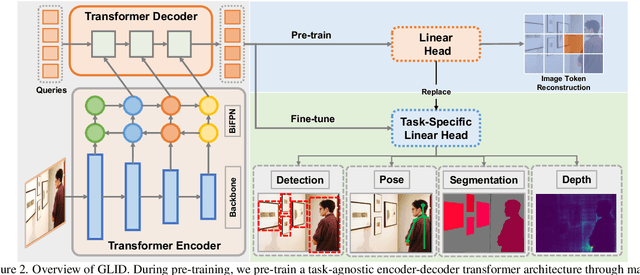
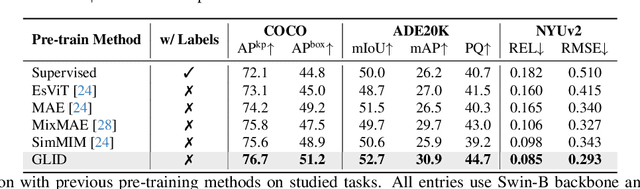
This paper proposes a GeneraLIst encoder-Decoder (GLID) pre-training method for better handling various downstream computer vision tasks. While self-supervised pre-training approaches, e.g., Masked Autoencoder, have shown success in transfer learning, task-specific sub-architectures are still required to be appended for different downstream tasks, which cannot enjoy the benefits of large-scale pre-training. GLID overcomes this challenge by allowing the pre-trained generalist encoder-decoder to be fine-tuned on various vision tasks with minimal task-specific architecture modifications. In the GLID training scheme, pre-training pretext task and other downstream tasks are modeled as "query-to-answer" problems, including the pre-training pretext task and other downstream tasks. We pre-train a task-agnostic encoder-decoder with query-mask pairs. During fine-tuning, GLID maintains the pre-trained encoder-decoder and queries, only replacing the topmost linear transformation layer with task-specific linear heads. This minimizes the pretrain-finetune architecture inconsistency and enables the pre-trained model to better adapt to downstream tasks. GLID achieves competitive performance on various vision tasks, including object detection, image segmentation, pose estimation, and depth estimation, outperforming or matching specialist models such as Mask2Former, DETR, ViTPose, and BinsFormer.
DecisionNCE: Embodied Multimodal Representations via Implicit Preference Learning
Feb 28, 2024Multimodal pretraining has emerged as an effective strategy for the trinity of goals of representation learning in autonomous robots: 1) extracting both local and global task progression information; 2) enforcing temporal consistency of visual representation; 3) capturing trajectory-level language grounding. Most existing methods approach these via separate objectives, which often reach sub-optimal solutions. In this paper, we propose a universal unified objective that can simultaneously extract meaningful task progression information from image sequences and seamlessly align them with language instructions. We discover that via implicit preferences, where a visual trajectory inherently aligns better with its corresponding language instruction than mismatched pairs, the popular Bradley-Terry model can transform into representation learning through proper reward reparameterizations. The resulted framework, DecisionNCE, mirrors an InfoNCE-style objective but is distinctively tailored for decision-making tasks, providing an embodied representation learning framework that elegantly extracts both local and global task progression features, with temporal consistency enforced through implicit time contrastive learning, while ensuring trajectory-level instruction grounding via multimodal joint encoding. Evaluation on both simulated and real robots demonstrates that DecisionNCE effectively facilitates diverse downstream policy learning tasks, offering a versatile solution for unified representation and reward learning. Project Page: https://2toinf.github.io/DecisionNCE/
Towards Better 3D Knowledge Transfer via Masked Image Modeling for Multi-view 3D Understanding
Mar 20, 2023Multi-view camera-based 3D detection is a challenging problem in computer vision. Recent works leverage a pretrained LiDAR detection model to transfer knowledge to a camera-based student network. However, we argue that there is a major domain gap between the LiDAR BEV features and the camera-based BEV features, as they have different characteristics and are derived from different sources. In this paper, we propose Geometry Enhanced Masked Image Modeling (GeoMIM) to transfer the knowledge of the LiDAR model in a pretrain-finetune paradigm for improving the multi-view camera-based 3D detection. GeoMIM is a multi-camera vision transformer with Cross-View Attention (CVA) blocks that uses LiDAR BEV features encoded by the pretrained BEV model as learning targets. During pretraining, GeoMIM's decoder has a semantic branch completing dense perspective-view features and the other geometry branch reconstructing dense perspective-view depth maps. The depth branch is designed to be camera-aware by inputting the camera's parameters for better transfer capability. Extensive results demonstrate that GeoMIM outperforms existing methods on nuScenes benchmark, achieving state-of-the-art performance for camera-based 3D object detection and 3D segmentation.