 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHLPD: Aligning LLMs to Human Language Preference for Machine-Revised Text Detection
Nov 12, 2025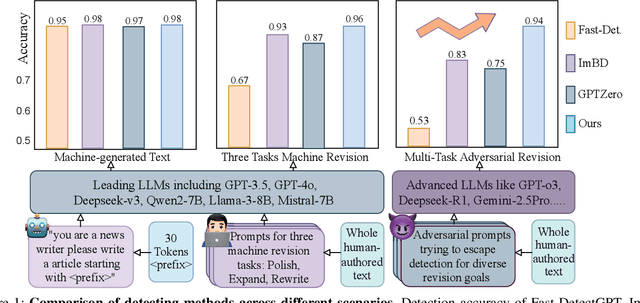
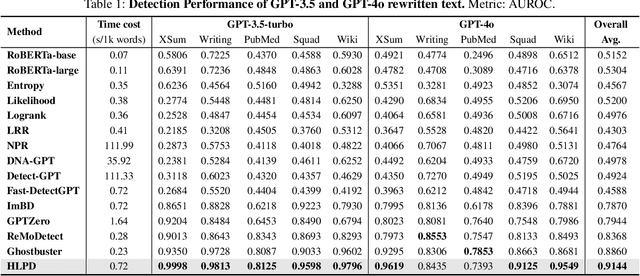
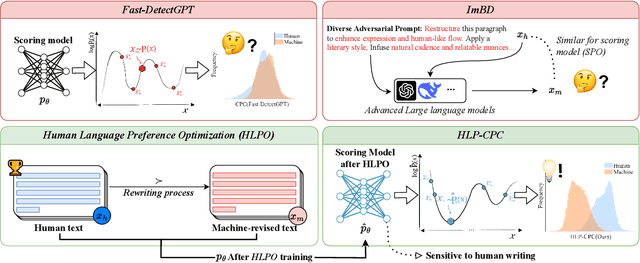
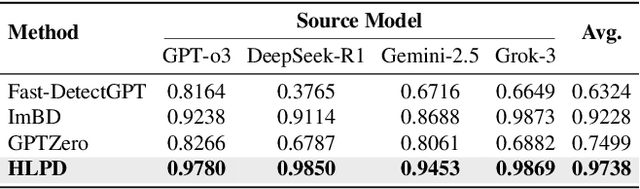
To prevent misinformation and social issues arising from trustworthy-looking content generated by LLMs, it is crucial to develop efficient and reliable methods for identifying the source of texts. Previous approaches have demonstrated exceptional performance in detecting texts fully generated by LLMs. However, these methods struggle when confronting more advanced LLM output or text with adversarial multi-task machine revision, especially in the black-box setting, where the generating model is unknown. To address this challenge, grounded in the hypothesis that human writing possesses distinctive stylistic patterns, we propose Human Language Preference Detection (HLPD). HLPD employs a reward-based alignment process, Human Language Preference Optimization (HLPO), to shift the scoring model's token distribution toward human-like writing, making the model more sensitive to human writing, therefore enhancing the identification of machine-revised text. We test HLPD in an adversarial multi-task evaluation framework that leverages a five-dimensional prompt generator and multiple advanced LLMs to create diverse revision scenarios. When detecting texts revised by GPT-series models, HLPD achieves a 15.11% relative improvement in AUROC over ImBD, surpassing Fast-DetectGPT by 45.56%. When evaluated on texts generated by advanced LLMs, HLPD achieves the highest average AUROC, exceeding ImBD by 5.53% and Fast-DetectGPT by 34.14%. Code will be made available at https://github.com/dfq2021/HLPD.
Hunting Attributes: Context Prototype-Aware Learning for Weakly Supervised Semantic Segmentation
Mar 12, 2024Recent weakly supervised semantic segmentation (WSSS) methods strive to incorporate contextual knowledge to improve the completeness of class activation maps (CAM). In this work, we argue that the knowledge bias between instances and contexts affects the capability of the prototype to sufficiently understand instance semantics. Inspired by prototype learning theory, we propose leveraging prototype awareness to capture diverse and fine-grained feature attributes of instances. The hypothesis is that contextual prototypes might erroneously activate similar and frequently co-occurring object categories due to this knowledge bias. Therefore, we propose to enhance the prototype representation ability by mitigating the bias to better capture spatial coverage in semantic object regions. With this goal, we present a Context Prototype-Aware Learning (CPAL) strategy, which leverages semantic context to enrich instance comprehension. The core of this method is to accurately capture intra-class variations in object features through context-aware prototypes, facilitating the adaptation to the semantic attributes of various instances. We design feature distribution alignment to optimize prototype awareness, aligning instance feature distributions with dense features. In addition, a unified training framework is proposed to combine label-guided classification supervision and prototypes-guided self-supervision. Experimental results on PASCAL VOC 2012 and MS COCO 2014 show that CPAL significantly improves off-the-shelf methods and achieves state-of-the-art performance. The project is available at https://github.com/Barrett-python/CPAL.
Continual Driving Policy Optimization with Closed-Loop Individualized Curricula
Sep 25, 2023The safety of autonomous vehicles (AV) has been a long-standing top concern, stemming from the absence of rare and safety-critical scenarios in the long-tail naturalistic driving distribution. To tackle this challenge, a surge of research in scenario-based autonomous driving has emerged, with a focus on generating high-risk driving scenarios and applying them to conduct safety-critical testing of AV models. However, limited work has been explored on the reuse of these extensive scenarios to iteratively improve AV models. Moreover, it remains intractable and challenging to filter through gigantic scenario libraries collected from other AV models with distinct behaviors, attempting to extract transferable information for current AV improvement. Therefore, we develop a continual driving policy optimization framework featuring Closed-Loop Individualized Curricula (CLIC), which we factorize into a set of standardized sub-modules for flexible implementation choices: AV Evaluation, Scenario Selection, and AV Training. CLIC frames AV Evaluation as a collision prediction task, where it estimates the chance of AV failures in these scenarios at each iteration. Subsequently, by re-sampling from historical scenarios based on these failure probabilities, CLIC tailors individualized curricula for downstream training, aligning them with the evaluated capability of AV. Accordingly, CLIC not only maximizes the utilization of the vast pre-collected scenario library for closed-loop driving policy optimization but also facilitates AV improvement by individualizing its training with more challenging cases out of those poorly organized scenarios. Experimental results clearly indicate that CLIC surpasses other curriculum-based training strategies, showing substantial improvement in managing risky scenarios, while still maintaining proficiency in handling simpler cases.