 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYoNoSplat: You Only Need One Model for Feedforward 3D Gaussian Splatting
Nov 10, 2025Fast and flexible 3D scene reconstruction from unstructured image collections remains a significant challenge. We present YoNoSplat, a feedforward model that reconstructs high-quality 3D Gaussian Splatting representations from an arbitrary number of images. Our model is highly versatile, operating effectively with both posed and unposed, calibrated and uncalibrated inputs. YoNoSplat predicts local Gaussians and camera poses for each view, which are aggregated into a global representation using either predicted or provided poses. To overcome the inherent difficulty of jointly learning 3D Gaussians and camera parameters, we introduce a novel mixing training strategy. This approach mitigates the entanglement between the two tasks by initially using ground-truth poses to aggregate local Gaussians and gradually transitioning to a mix of predicted and ground-truth poses, which prevents both training instability and exposure bias. We further resolve the scale ambiguity problem by a novel pairwise camera-distance normalization scheme and by embedding camera intrinsics into the network. Moreover, YoNoSplat also predicts intrinsic parameters, making it feasible for uncalibrated inputs. YoNoSplat demonstrates exceptional efficiency, reconstructing a scene from 100 views (at 280x518 resolution) in just 2.69 seconds on an NVIDIA GH200 GPU. It achieves state-of-the-art performance on standard benchmarks in both pose-free and pose-dependent settings. Our project page is at https://botaoye.github.io/yonosplat/.
ReSplat: Learning Recurrent Gaussian Splats
Oct 09, 2025While feed-forward Gaussian splatting models provide computational efficiency and effectively handle sparse input settings, their performance is fundamentally limited by the reliance on a single forward pass during inference. We propose ReSplat, a feed-forward recurrent Gaussian splatting model that iteratively refines 3D Gaussians without explicitly computing gradients. Our key insight is that the Gaussian splatting rendering error serves as a rich feedback signal, guiding the recurrent network to learn effective Gaussian updates. This feedback signal naturally adapts to unseen data distributions at test time, enabling robust generalization. To initialize the recurrent process, we introduce a compact reconstruction model that operates in a $16 \times$ subsampled space, producing $16 \times$ fewer Gaussians than previous per-pixel Gaussian models. This substantially reduces computational overhead and allows for efficient Gaussian updates. Extensive experiments across varying of input views (2, 8, 16), resolutions ($256 \times 256$ to $540 \times 960$), and datasets (DL3DV and RealEstate10K) demonstrate that our method achieves state-of-the-art performance while significantly reducing the number of Gaussians and improving the rendering speed. Our project page is at https://haofeixu.github.io/resplat/.
Multi-View 3D Point Tracking
Aug 28, 2025We introduce the first data-driven multi-view 3D point tracker, designed to track arbitrary points in dynamic scenes using multiple camera views. Unlike existing monocular trackers, which struggle with depth ambiguities and occlusion, or prior multi-camera methods that require over 20 cameras and tedious per-sequence optimization, our feed-forward model directly predicts 3D correspondences using a practical number of cameras (e.g., four), enabling robust and accurate online tracking. Given known camera poses and either sensor-based or estimated multi-view depth, our tracker fuses multi-view features into a unified point cloud and applies k-nearest-neighbors correlation alongside a transformer-based update to reliably estimate long-range 3D correspondences, even under occlusion. We train on 5K synthetic multi-view Kubric sequences and evaluate on two real-world benchmarks: Panoptic Studio and DexYCB, achieving median trajectory errors of 3.1 cm and 2.0 cm, respectively. Our method generalizes well to diverse camera setups of 1-8 views with varying vantage points and video lengths of 24-150 frames. By releasing our tracker alongside training and evaluation datasets, we aim to set a new standard for multi-view 3D tracking research and provide a practical tool for real-world applications. Project page available at https://ethz-vlg.github.io/mvtracker.
PanSplat: 4K Panorama Synthesis with Feed-Forward Gaussian Splatting
Dec 16, 2024With the advent of portable 360{\deg} cameras, panorama has gained significant attention in applications like virtual reality (VR), virtual tours, robotics, and autonomous driving. As a result, wide-baseline panorama view synthesis has emerged as a vital task, where high resolution, fast inference, and memory efficiency are essential. Nevertheless, existing methods are typically constrained to lower resolutions (512 $\times$ 1024) due to demanding memory and computational requirements. In this paper, we present PanSplat, a generalizable, feed-forward approach that efficiently supports resolution up to 4K (2048 $\times$ 4096). Our approach features a tailored spherical 3D Gaussian pyramid with a Fibonacci lattice arrangement, enhancing image quality while reducing information redundancy. To accommodate the demands of high resolution, we propose a pipeline that integrates a hierarchical spherical cost volume and Gaussian heads with local operations, enabling two-step deferred backpropagation for memory-efficient training on a single A100 GPU. Experiments demonstrate that PanSplat achieves state-of-the-art results with superior efficiency and image quality across both synthetic and real-world datasets. Code will be available at \url{https://github.com/chengzhag/PanSplat}.
MVSplat360: Feed-Forward 360 Scene Synthesis from Sparse Views
Nov 07, 2024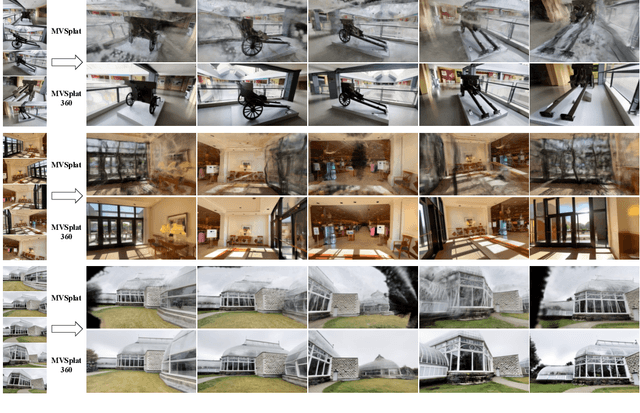

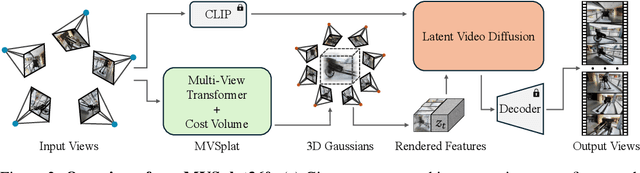
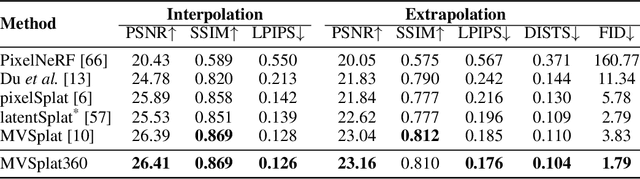
We introduce MVSplat360, a feed-forward approach for 360{\deg} novel view synthesis (NVS) of diverse real-world scenes, using only sparse observations. This setting is inherently ill-posed due to minimal overlap among input views and insufficient visual information provided, making it challenging for conventional methods to achieve high-quality results. Our MVSplat360 addresses this by effectively combining geometry-aware 3D reconstruction with temporally consistent video generation. Specifically, it refactors a feed-forward 3D Gaussian Splatting (3DGS) model to render features directly into the latent space of a pre-trained Stable Video Diffusion (SVD) model, where these features then act as pose and visual cues to guide the denoising process and produce photorealistic 3D-consistent views. Our model is end-to-end trainable and supports rendering arbitrary views with as few as 5 sparse input views. To evaluate MVSplat360's performance, we introduce a new benchmark using the challenging DL3DV-10K dataset, where MVSplat360 achieves superior visual quality compared to state-of-the-art methods on wide-sweeping or even 360{\deg} NVS tasks. Experiments on the existing benchmark RealEstate10K also confirm the effectiveness of our model. The video results are available on our project page: https://donydchen.github.io/mvsplat360.
No Pose, No Problem: Surprisingly Simple 3D Gaussian Splats from Sparse Unposed Images
Oct 31, 2024
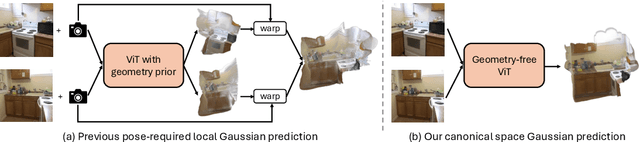
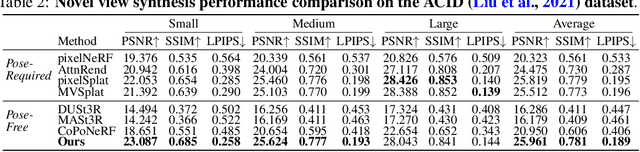
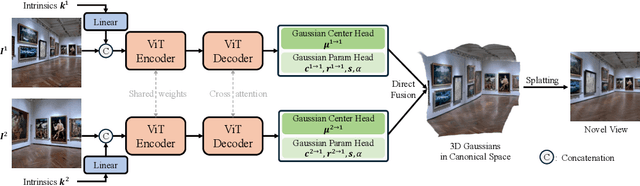
We introduce NoPoSplat, a feed-forward model capable of reconstructing 3D scenes parameterized by 3D Gaussians from \textit{unposed} sparse multi-view images. Our model, trained exclusively with photometric loss, achieves real-time 3D Gaussian reconstruction during inference. To eliminate the need for accurate pose input during reconstruction, we anchor one input view's local camera coordinates as the canonical space and train the network to predict Gaussian primitives for all views within this space. This approach obviates the need to transform Gaussian primitives from local coordinates into a global coordinate system, thus avoiding errors associated with per-frame Gaussians and pose estimation. To resolve scale ambiguity, we design and compare various intrinsic embedding methods, ultimately opting to convert camera intrinsics into a token embedding and concatenate it with image tokens as input to the model, enabling accurate scene scale prediction. We utilize the reconstructed 3D Gaussians for novel view synthesis and pose estimation tasks and propose a two-stage coarse-to-fine pipeline for accurate pose estimation. Experimental results demonstrate that our pose-free approach can achieve superior novel view synthesis quality compared to pose-required methods, particularly in scenarios with limited input image overlap. For pose estimation, our method, trained without ground truth depth or explicit matching loss, significantly outperforms the state-of-the-art methods with substantial improvements. This work makes significant advances in pose-free generalizable 3D reconstruction and demonstrates its applicability to real-world scenarios. Code and trained models are available at https://noposplat.github.io/.
DepthSplat: Connecting Gaussian Splatting and Depth
Oct 17, 2024
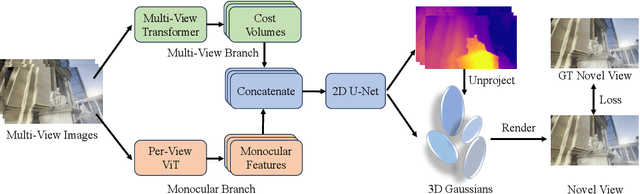
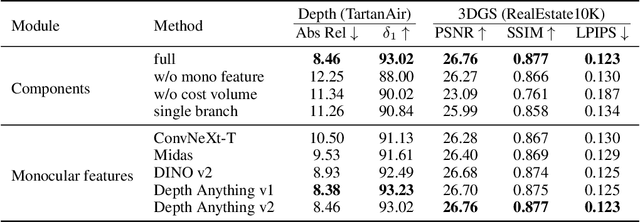
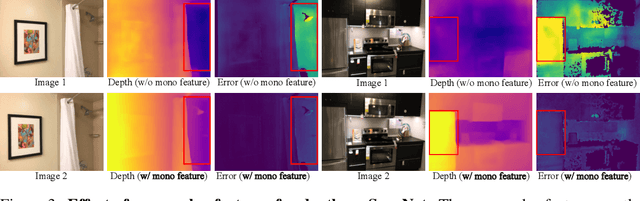
Gaussian splatting and single/multi-view depth estimation are typically studied in isolation. In this paper, we present DepthSplat to connect Gaussian splatting and depth estimation and study their interactions. More specifically, we first contribute a robust multi-view depth model by leveraging pre-trained monocular depth features, leading to high-quality feed-forward 3D Gaussian splatting reconstructions. We also show that Gaussian splatting can serve as an unsupervised pre-training objective for learning powerful depth models from large-scale unlabelled datasets. We validate the synergy between Gaussian splatting and depth estimation through extensive ablation and cross-task transfer experiments. Our DepthSplat achieves state-of-the-art performance on ScanNet, RealEstate10K and DL3DV datasets in terms of both depth estimation and novel view synthesis, demonstrating the mutual benefits of connecting both tasks. Our code, models, and video results are available at https://haofeixu.github.io/depthsplat/.
LaRa: Efficient Large-Baseline Radiance Fields
Jul 05, 2024


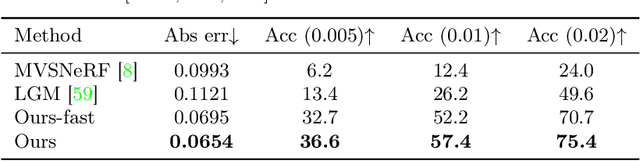
Radiance field methods have achieved photorealistic novel view synthesis and geometry reconstruction. But they are mostly applied in per-scene optimization or small-baseline settings. While several recent works investigate feed-forward reconstruction with large baselines by utilizing transformers, they all operate with a standard global attention mechanism and hence ignore the local nature of 3D reconstruction. We propose a method that unifies local and global reasoning in transformer layers, resulting in improved quality and faster convergence. Our model represents scenes as Gaussian Volumes and combines this with an image encoder and Group Attention Layers for efficient feed-forward reconstruction. Experimental results demonstrate that our model, trained for two days on four GPUs, demonstrates high fidelity in reconstructing 360° radiance fields, and robustness to zero-shot and out-of-domain testing.
GoMVS: Geometrically Consistent Cost Aggregation for Multi-View Stereo
Apr 11, 2024



Matching cost aggregation plays a fundamental role in learning-based multi-view stereo networks. However, directly aggregating adjacent costs can lead to suboptimal results due to local geometric inconsistency. Related methods either seek selective aggregation or improve aggregated depth in the 2D space, both are unable to handle geometric inconsistency in the cost volume effectively. In this paper, we propose GoMVS to aggregate geometrically consistent costs, yielding better utilization of adjacent geometries. More specifically, we correspond and propagate adjacent costs to the reference pixel by leveraging the local geometric smoothness in conjunction with surface normals. We achieve this by the geometric consistent propagation (GCP) module. It computes the correspondence from the adjacent depth hypothesis space to the reference depth space using surface normals, then uses the correspondence to propagate adjacent costs to the reference geometry, followed by a convolution for aggregation. Our method achieves new state-of-the-art performance on DTU, Tanks & Temple, and ETH3D datasets. Notably, our method ranks 1st on the Tanks & Temple Advanced benchmark.
MVSplat: Efficient 3D Gaussian Splatting from Sparse Multi-View Images
Mar 21, 2024We propose MVSplat, an efficient feed-forward 3D Gaussian Splatting model learned from sparse multi-view images. To accurately localize the Gaussian centers, we propose to build a cost volume representation via plane sweeping in the 3D space, where the cross-view feature similarities stored in the cost volume can provide valuable geometry cues to the estimation of depth. We learn the Gaussian primitives' opacities, covariances, and spherical harmonics coefficients jointly with the Gaussian centers while only relying on photometric supervision. We demonstrate the importance of the cost volume representation in learning feed-forward Gaussian Splatting models via extensive experimental evaluations. On the large-scale RealEstate10K and ACID benchmarks, our model achieves state-of-the-art performance with the fastest feed-forward inference speed (22 fps). Compared to the latest state-of-the-art method pixelSplat, our model uses $10\times $ fewer parameters and infers more than $2\times$ faster while providing higher appearance and geometry quality as well as better cross-dataset generalization.