 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiCub3 Avatar System
Mar 14, 2022
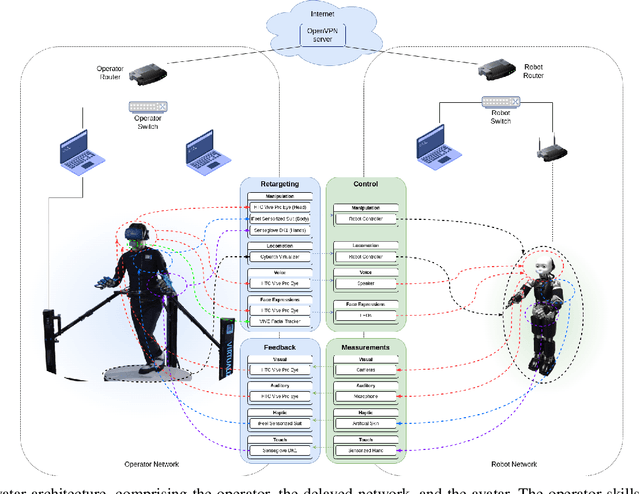
We present an avatar system that enables a human operator to visit a remote location via iCub3, a new humanoid robot developed at the Italian Institute of Technology (IIT) paving the way for the next generation of the iCub platforms. On the one hand, we present the humanoid iCub3 that plays the role of the robotic avatar. Particular attention is paid to the differences between iCub3 and the classical iCub humanoid robot. On the other hand, we present the set of technologies of the avatar system at the operator side. They are mainly composed of iFeel, namely, IIT lightweight non-invasive wearable devices for motion tracking and haptic feedback, and of non-IIT technologies designed for virtual reality ecosystems. Finally, we show the effectiveness of the avatar system by describing a demonstration involving a realtime teleoperation of the iCub3. The robot is located in Venice, Biennale di Venezia, while the human operator is at more than 290km distance and located in Genoa, IIT. Using a standard fiber optic internet connection, the avatar system transports the operator locomotion, manipulation, voice, and face expressions to the iCub3 with visual, auditory, haptic and touch feedback.
iCub
May 07, 2021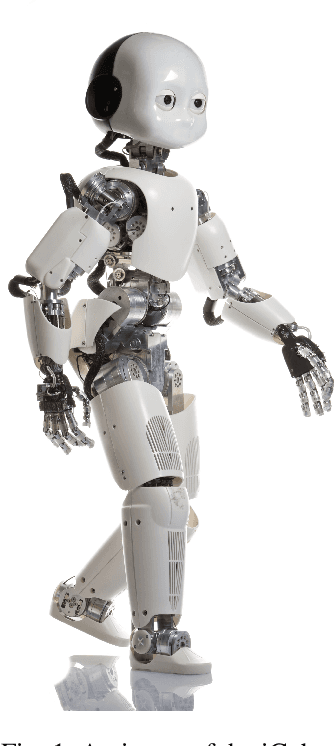
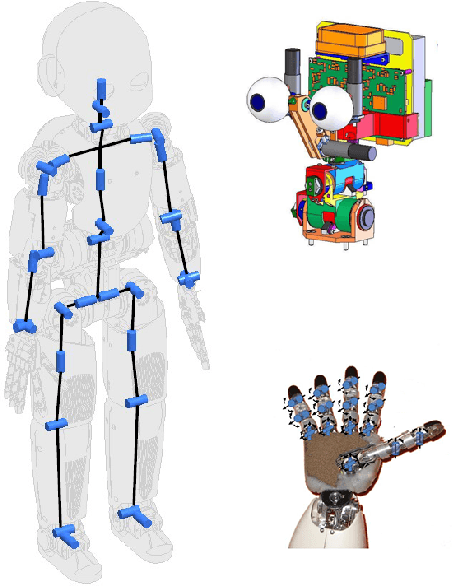
In this chapter we describe the history and evolution of the iCub humanoid platform. We start by describing the first version as it was designed during the RobotCub EU project and illustrate how it evolved to become the platform that is adopted by more than 30 laboratories world wide. We complete the chapter by illustrating some of the research activities that are currently carried out on the iCub robot, i.e. visual perception, event driven sensing and dynamic control. We conclude the Chapter with a discussion of the lessons we learned and a preview of the upcoming next release of the robot, iCub 3.0.
Non-Linear Trajectory Optimization for Large Step-Ups: Application to the Humanoid Robot Atlas
Apr 25, 2020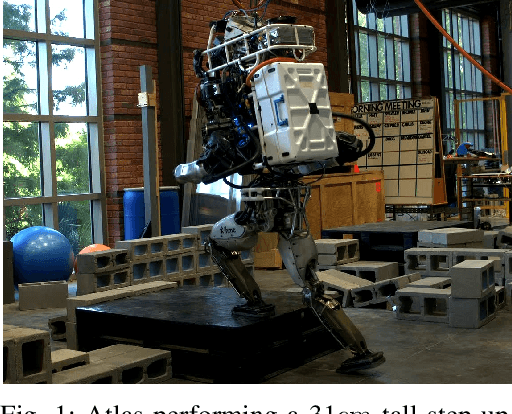
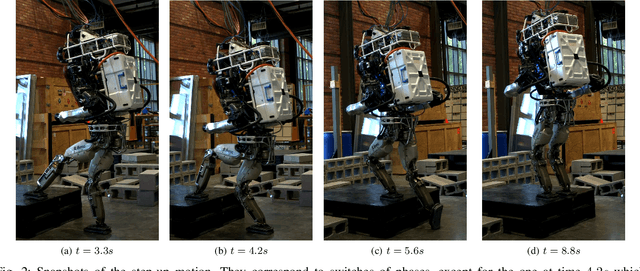
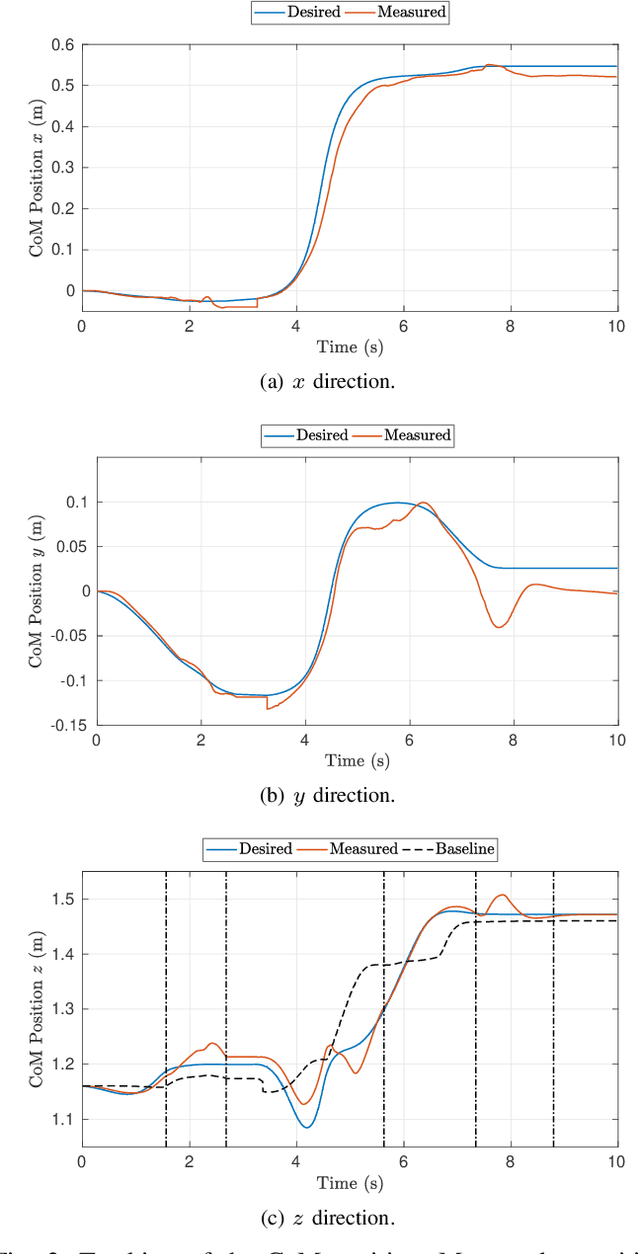
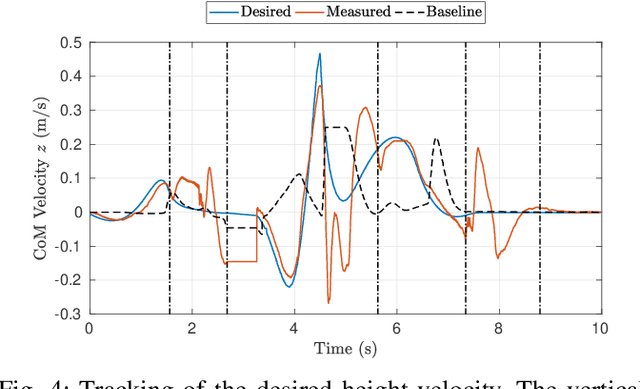
Performing large step-ups is a challenging task for a humanoid robot. It requires the robot to perform motions at the limit of its reachable workspace while straining to move its body upon the obstacle. This paper presents a non-linear trajectory optimization method for generating step-up motions. We adopt a simplified model of the centroidal dynamics to generate feasible Center of Mass trajectories aimed at reducing the torques required for the step-up motion. The activation and deactivation of contacts at both feet are considered explicitly. The output of the planner is a Center of Mass trajectory plus an optimal duration for each walking phase. These desired values are stabilized by a whole-body controller that determines a set of desired joint torques. We experimentally demonstrate that by using trajectory optimization techniques, the maximum torque required to the full-size humanoid robot Atlas can be reduced up to 20% when performing a step-up motion.
Whole-Body Walking Generation using Contact Parametrization: A Non-Linear Trajectory Optimization Approach
Mar 10, 2020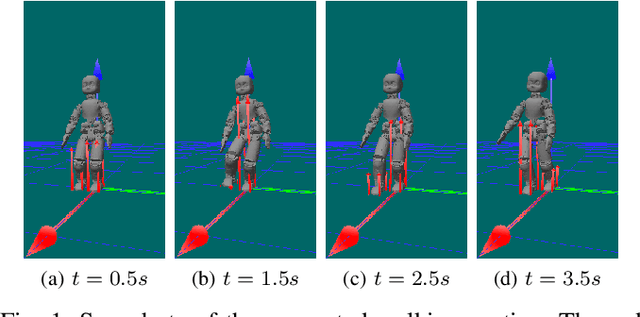
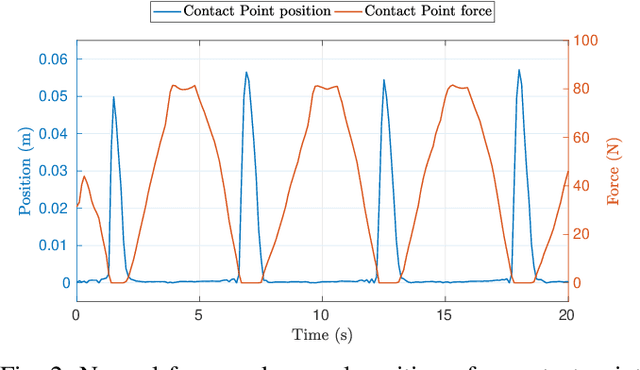
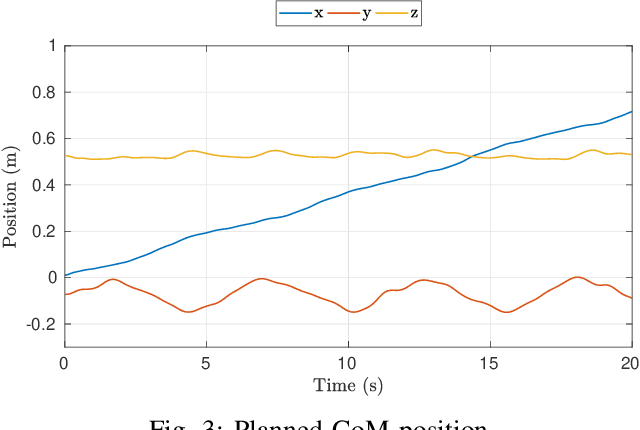
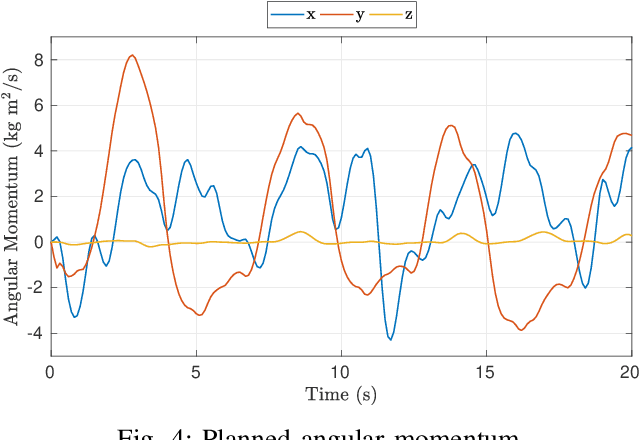
In this paper, we describe a planner capable of generating walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot model. The interaction between the robot and the walking surface is modeled explicitly through a novel contact parametrization. The approach is complementarity-free and does not need a predefined contact sequence. By solving an optimal control problem we obtain walking trajectories. In particular, through a set of constraints and dynamic equations, we model the robot in contact with the ground. We describe the objective the robot needs to achieve with a set of tasks. The whole optimal control problem is transcribed into an optimization problem via a Direct Multiple Shooting approach and solved with an off-the-shelf solver. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired Center of Mass velocity and a reference point on the ground.
Gym-Ignition: Reproducible Robotic Simulations for Reinforcement Learning
Dec 02, 2019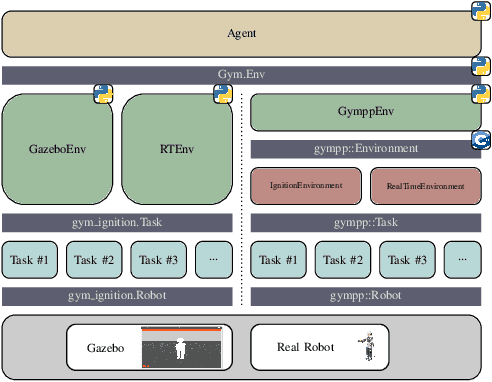
This paper presents Gym-Ignition, a new framework to create reproducible robotic environments for reinforcement learning research. It interfaces with the new generation of Gazebo, part of the Ignition Robotics suite, which provides three main improvements for reinforcement learning applications compared to the alternatives: 1) the modular architecture enables using the simulator as a C++ library, simplifying the interconnection with external software; 2) multiple physics and rendering engines are supported as plugins, simplifying their selection during the execution; 3) the new distributed simulation capability allows simulating complex scenarios while sharing the load on multiple workers and machines. The core of Gym-Ignition is a component that contains the Ignition Gazebo simulator and exposes a simple interface for its configuration and execution. We provide a Python package that allows developers to create robotic environments simulated in Ignition Gazebo. Environments expose the common OpenAI Gym interface, making them compatible out-of-the-box with third-party frameworks containing reinforcement learning algorithms. Simulations can be executed in both headless and GUI mode, the physics engine can run in accelerated mode, and instances can be parallelized. Furthermore, the Gym-Ignition software architecture provides abstraction of the Robot and the Task, making environments agnostic on the specific runtime. This abstraction allows their execution also in a real-time setting on actual robotic platforms, even if driven by different middlewares.
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018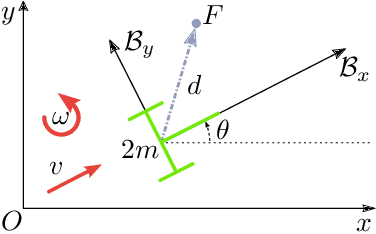
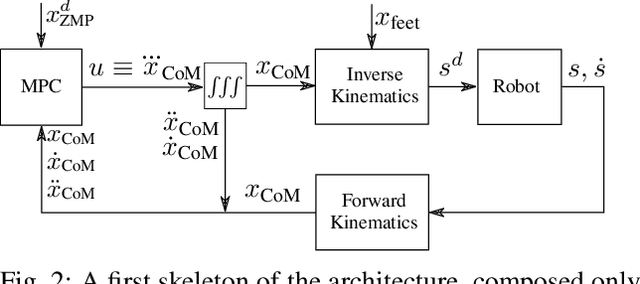
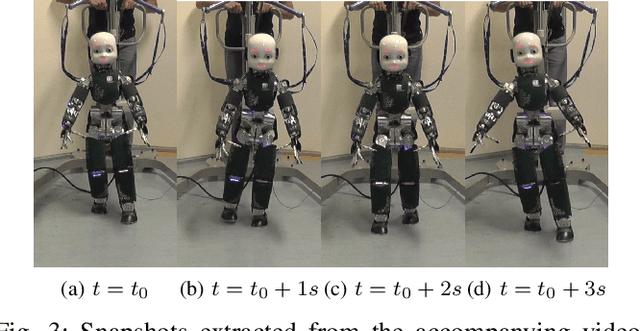
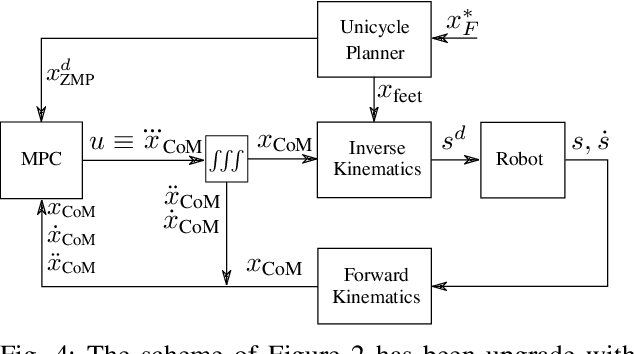
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.
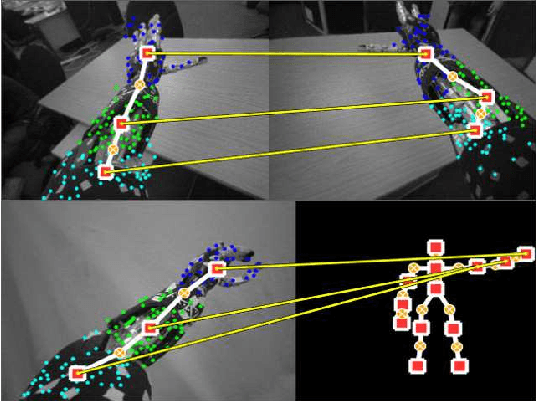
Compact Real-time avoidance on a Humanoid Robot for Human-robot Interaction
Jan 17, 2018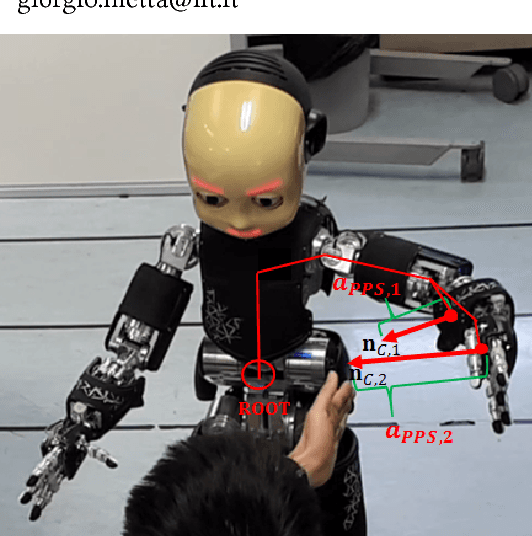
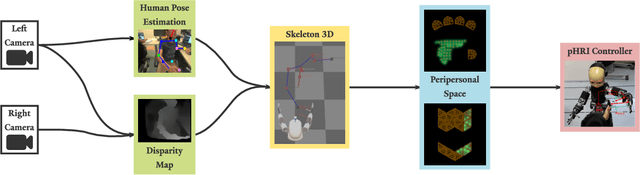
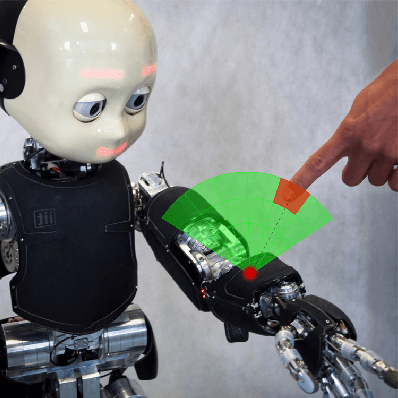
With robots leaving factories and entering less controlled domains, possibly sharing the space with humans, safety is paramount and multimodal awareness of the body surface and the surrounding environment is fundamental. Taking inspiration from peripersonal space representations in humans, we present a framework on a humanoid robot that dynamically maintains such a protective safety zone, composed of the following main components: (i) a human 2D keypoints estimation pipeline employing a deep learning based algorithm, extended here into 3D using disparity; (ii) a distributed peripersonal space representation around the robot's body parts; (iii) a reaching controller that incorporates all obstacles entering the robot's safety zone on the fly into the task. Pilot experiments demonstrate that an effective safety margin between the robot's and the human's body parts is kept. The proposed solution is flexible and versatile since the safety zone around individual robot and human body parts can be selectively modulated---here we demonstrate stronger avoidance of the human head compared to rest of the body. Our system works in real time and is self-contained, with no external sensory equipment and use of onboard cameras only.
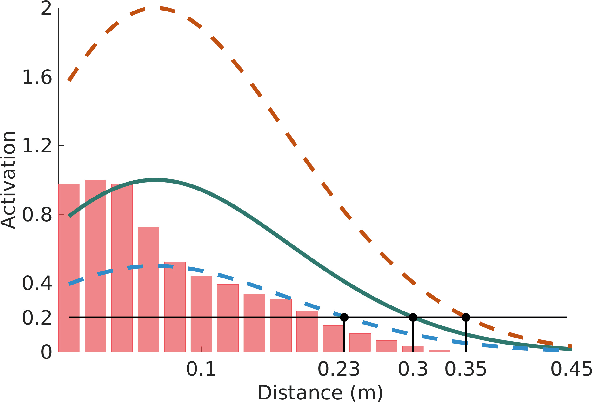
DAC-h3: A Proactive Robot Cognitive Architecture to Acquire and Express Knowledge About the World and the Self
Sep 18, 2017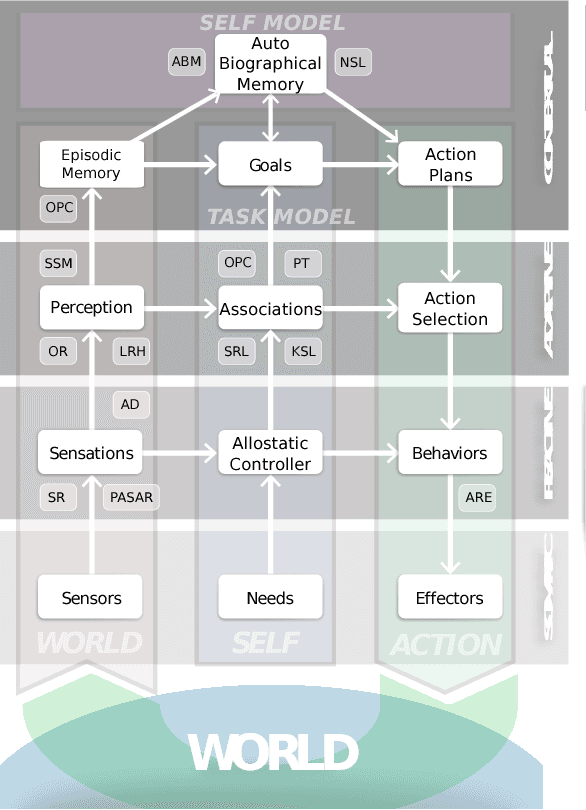
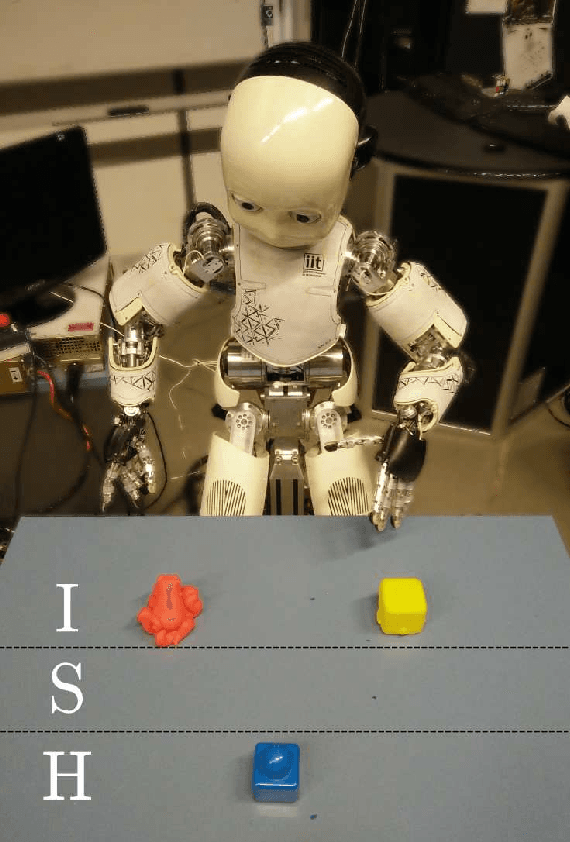

This paper introduces a cognitive architecture for a humanoid robot to engage in a proactive, mixed-initiative exploration and manipulation of its environment, where the initiative can originate from both the human and the robot. The framework, based on a biologically-grounded theory of the brain and mind, integrates a reactive interaction engine, a number of state-of-the-art perceptual and motor learning algorithms, as well as planning abilities and an autobiographical memory. The architecture as a whole drives the robot behavior to solve the symbol grounding problem, acquire language capabilities, execute goal-oriented behavior, and express a verbal narrative of its own experience in the world. We validate our approach in human-robot interaction experiments with the iCub humanoid robot, showing that the proposed cognitive architecture can be applied in real time within a realistic scenario and that it can be used with naive users.
* Preprint version; final version available at http://ieeexplore.ieee.org/ IEEE Transactions on Cognitive and Developmental Systems (Accepted) DOI: 10.1109/TCDS.2017.2754143
Controlled Tactile Exploration and Haptic Object Recognition
Jun 27, 2017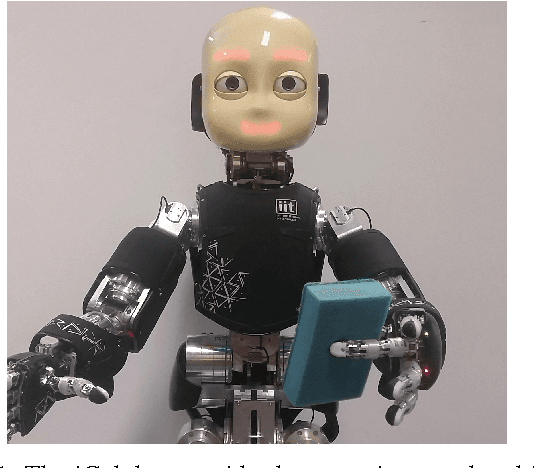
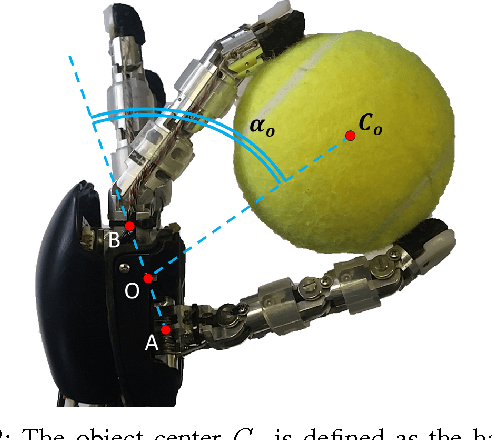
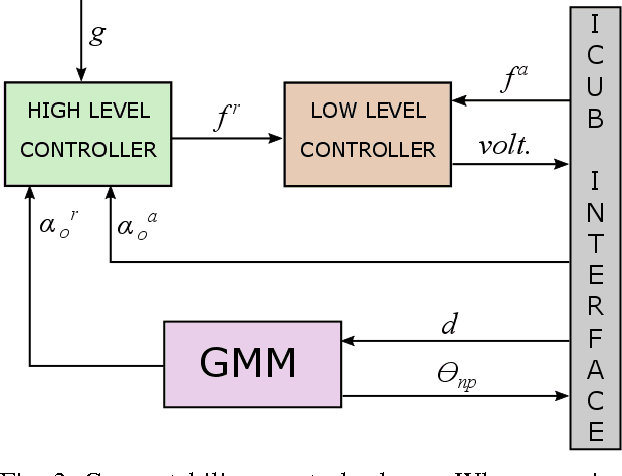
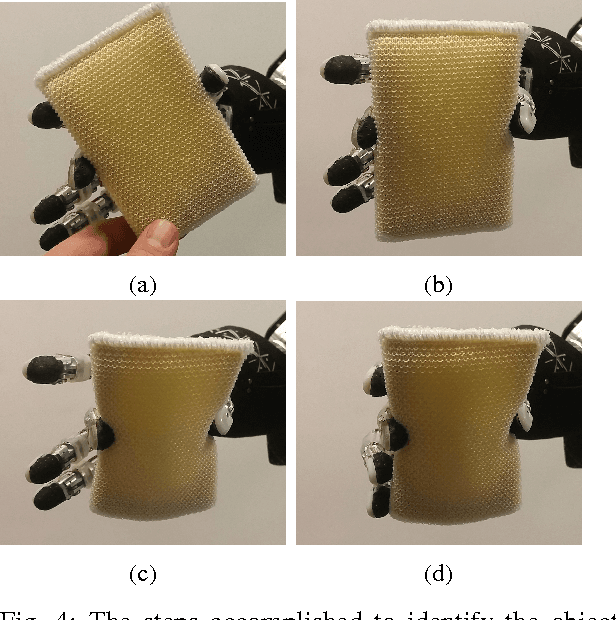
In this paper we propose a novel method for in-hand object recognition. The method is composed of a grasp stabilization controller and two exploratory behaviours to capture the shape and the softness of an object. Grasp stabilization plays an important role in recognizing objects. First, it prevents the object from slipping and facilitates the exploration of the object. Second, reaching a stable and repeatable position adds robustness to the learning algorithm and increases invariance with respect to the way in which the robot grasps the object. The stable poses are estimated using a Gaussian mixture model (GMM). We present experimental results showing that using our method the classifier can successfully distinguish 30 objects.We also compare our method with a benchmark experiment, in which the grasp stabilization is disabled. We show, with statistical significance, that our method outperforms the benchmark method.
Incremental Robot Learning of New Objects with Fixed Update Time
Feb 28, 2017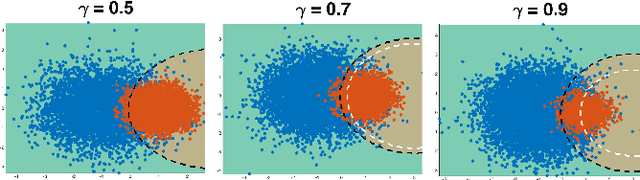
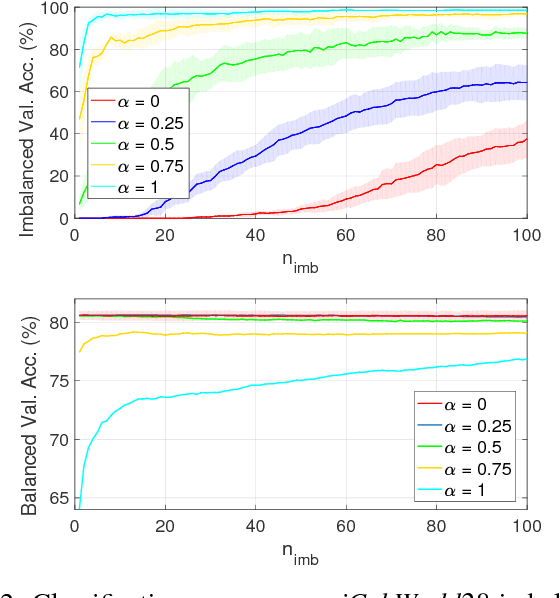
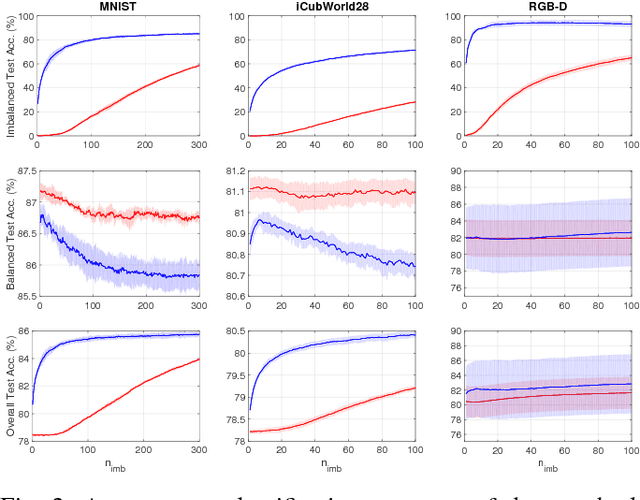
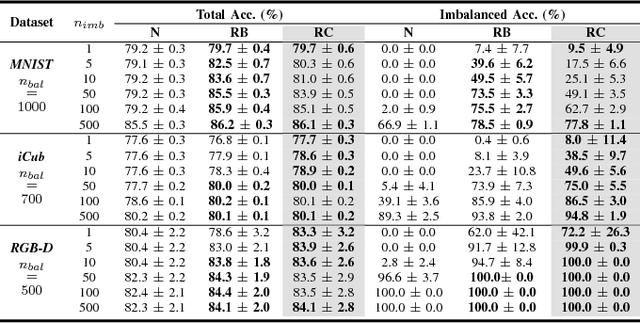
We consider object recognition in the context of lifelong learning, where a robotic agent learns to discriminate between a growing number of object classes as it accumulates experience about the environment. We propose an incremental variant of the Regularized Least Squares for Classification (RLSC) algorithm, and exploit its structure to seamlessly add new classes to the learned model. The presented algorithm addresses the problem of having an unbalanced proportion of training examples per class, which occurs when new objects are presented to the system for the first time. We evaluate our algorithm on both a machine learning benchmark dataset and two challenging object recognition tasks in a robotic setting. Empirical evidence shows that our approach achieves comparable or higher classification performance than its batch counterpart when classes are unbalanced, while being significantly faster.