 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDependency Parsing with Backtracking using Deep Reinforcement Learning
Jun 28, 2022
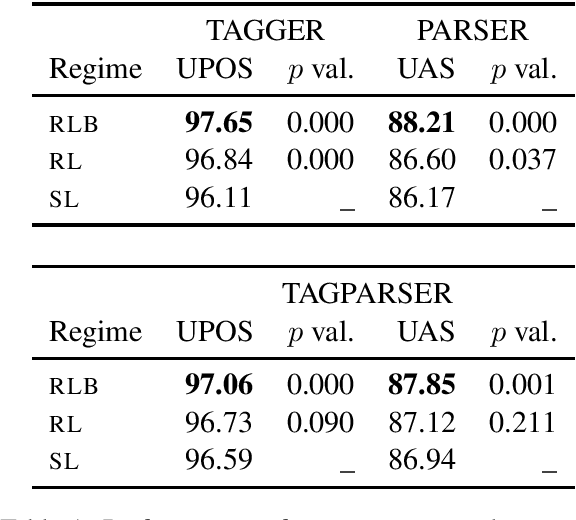
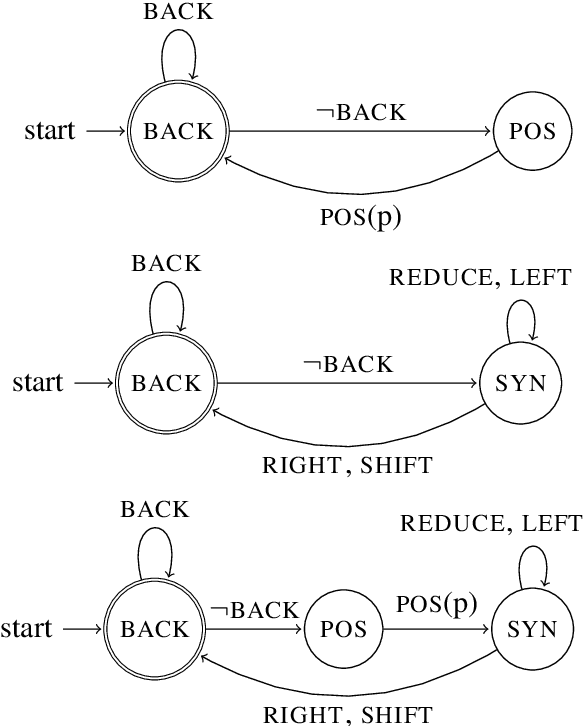
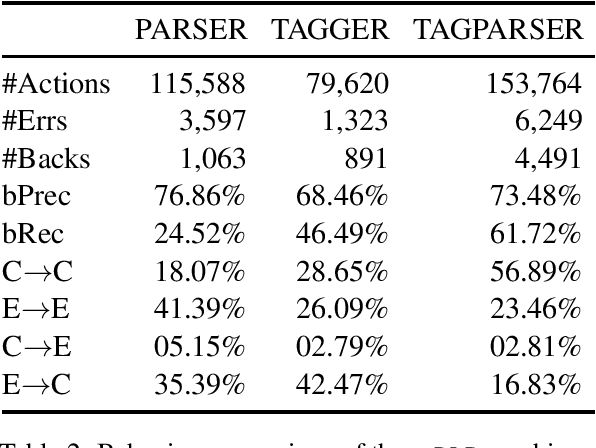
Greedy algorithms for NLP such as transition based parsing are prone to error propagation. One way to overcome this problem is to allow the algorithm to backtrack and explore an alternative solution in cases where new evidence contradicts the solution explored so far. In order to implement such a behavior, we use reinforcement learning and let the algorithm backtrack in cases where such an action gets a better reward than continuing to explore the current solution. We test this idea on both POS tagging and dependency parsing and show that backtracking is an effective means to fight against error propagation.
Bayesian Optimization for Developmental Robotics with Meta-Learning by Parameters Bounds Reduction
Jul 30, 2020



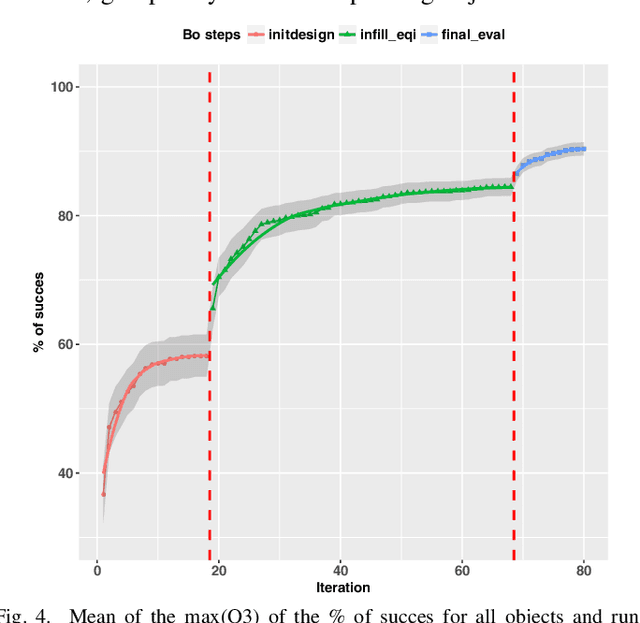
In robotics, methods and softwares usually require optimizations of hyperparameters in order to be efficient for specific tasks, for instance industrial bin-picking from homogeneous heaps of different objects. We present a developmental framework based on long-term memory and reasoning modules (Bayesian Optimisation, visual similarity and parameters bounds reduction) allowing a robot to use meta-learning mechanism increasing the efficiency of such continuous and constrained parameters optimizations. The new optimization, viewed as a learning for the robot, can take advantage of past experiences (stored in the episodic and procedural memories) to shrink the search space by using reduced parameters bounds computed from the best optimizations realized by the robot with similar tasks of the new one (e.g. bin-picking from an homogenous heap of a similar object, based on visual similarity of objects stored in the semantic memory). As example, we have confronted the system to the constrained optimizations of 9 continuous hyperparameters for a professional software (Kamido) in industrial robotic arm bin-picking tasks, a step that is needed each time to handle correctly new object. We used a simulator to create bin-picking tasks for 8 different objects (7 in simulation and one with real setup, without and with meta-learning with experiences coming from other similar objects) achieving goods results despite a very small optimization budget, with a better performance reached when meta-learning is used (84.3% vs 78.9% of success overall, with a small budget of 30 iterations for each optimization) for every object tested (p-value=0.036).
Toward a Procedural Fruit Tree Rendering Framework for Image Analysis
Jul 10, 2019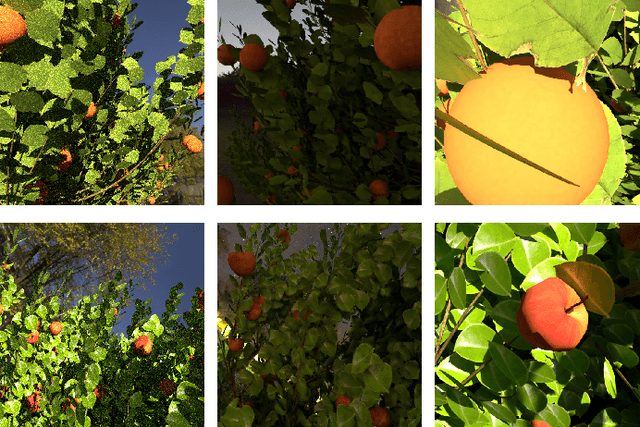
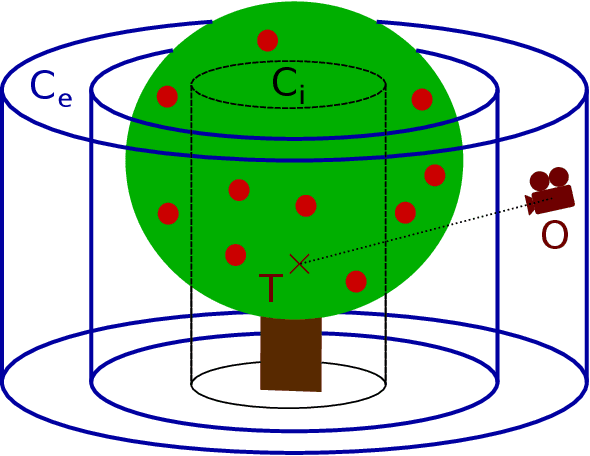
We propose a procedural fruit tree rendering framework, based on Blender and Python scripts allowing to generate quickly labeled dataset (i.e. including ground truth semantic segmentation). It is designed to train image analysis deep learning methods (e.g. in a robotic fruit harvesting context), where real labeled training datasets are usually scarce and existing synthetic ones are too specialized. Moreover, the framework includes the possibility to introduce parametrized variations in the model (e.g. lightning conditions, background), producing a dataset with embedded Domain Randomization aspect.
Developmental Bayesian Optimization of Black-Box with Visual Similarity-Based Transfer Learning
Oct 19, 2018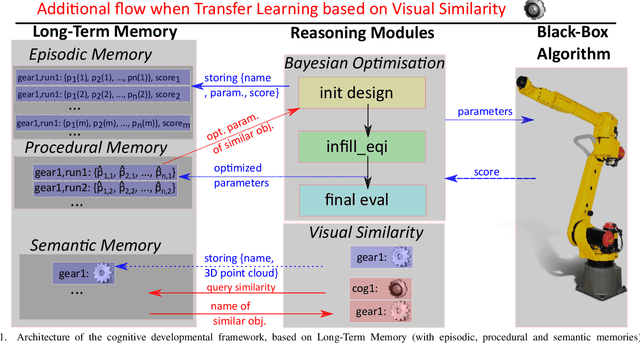
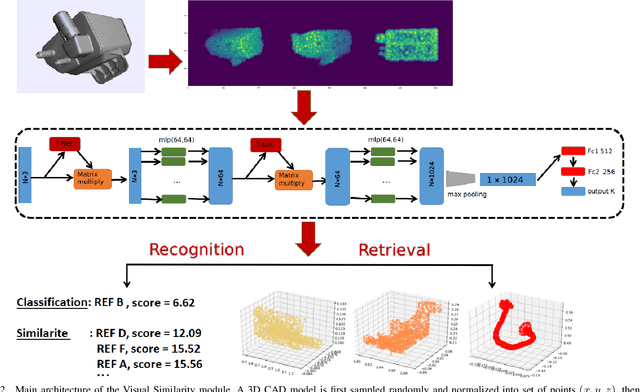
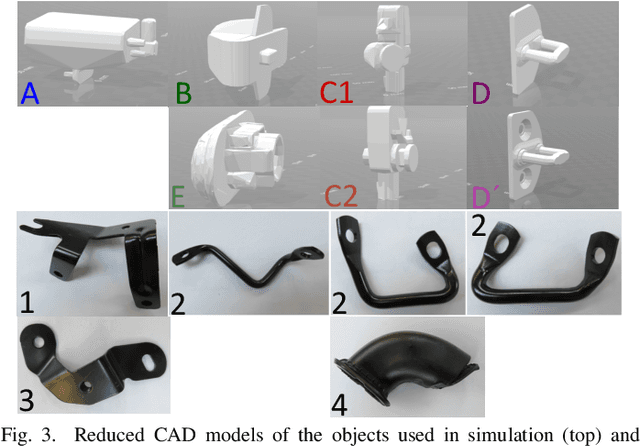
We present a developmental framework based on a long-term memory and reasoning mechanisms (Vision Similarity and Bayesian Optimisation). This architecture allows a robot to optimize autonomously hyper-parameters that need to be tuned from any action and/or vision module, treated as a black-box. The learning can take advantage of past experiences (stored in the episodic and procedural memories) in order to warm-start the exploration using a set of hyper-parameters previously optimized from objects similar to the new unknown one (stored in a semantic memory). As example, the system has been used to optimized 9 continuous hyper-parameters of a professional software (Kamido) both in simulation and with a real robot (industrial robotic arm Fanuc) with a total of 13 different objects. The robot is able to find a good object-specific optimization in 68 (simulation) or 40 (real) trials. In simulation, we demonstrate the benefit of the transfer learning based on visual similarity, as opposed to an amnesic learning (i.e. learning from scratch all the time). Moreover, with the real robot, we show that the method consistently outperforms the manual optimization from an expert with less than 2 hours of training time to achieve more than 88% of success.
DAC-h3: A Proactive Robot Cognitive Architecture to Acquire and Express Knowledge About the World and the Self
Sep 18, 2017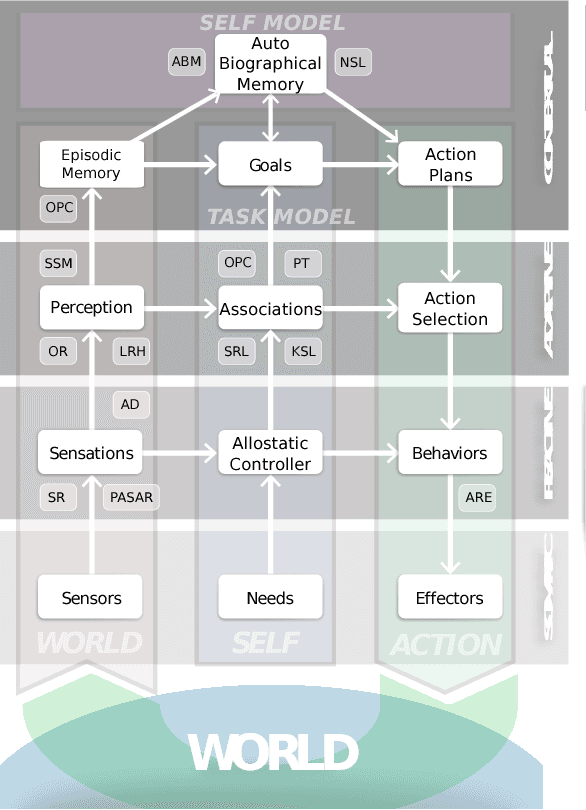
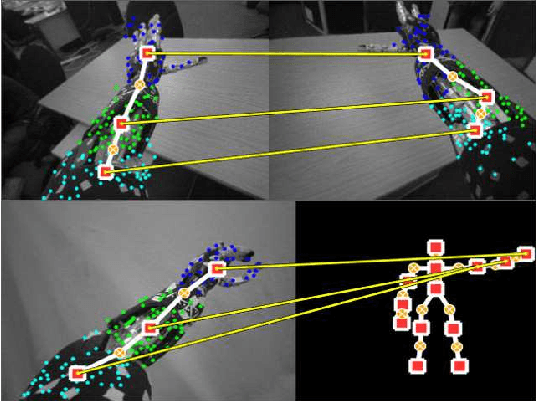
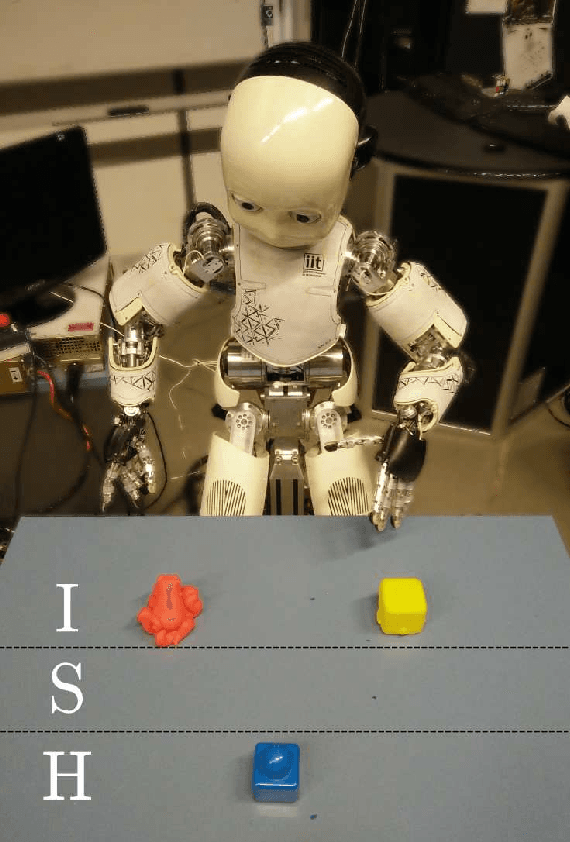

This paper introduces a cognitive architecture for a humanoid robot to engage in a proactive, mixed-initiative exploration and manipulation of its environment, where the initiative can originate from both the human and the robot. The framework, based on a biologically-grounded theory of the brain and mind, integrates a reactive interaction engine, a number of state-of-the-art perceptual and motor learning algorithms, as well as planning abilities and an autobiographical memory. The architecture as a whole drives the robot behavior to solve the symbol grounding problem, acquire language capabilities, execute goal-oriented behavior, and express a verbal narrative of its own experience in the world. We validate our approach in human-robot interaction experiments with the iCub humanoid robot, showing that the proposed cognitive architecture can be applied in real time within a realistic scenario and that it can be used with naive users.
* Preprint version; final version available at http://ieeexplore.ieee.org/ IEEE Transactions on Cognitive and Developmental Systems (Accepted) DOI: 10.1109/TCDS.2017.2754143