Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward a Procedural Fruit Tree Rendering Framework for Image Analysis
Paper and Code
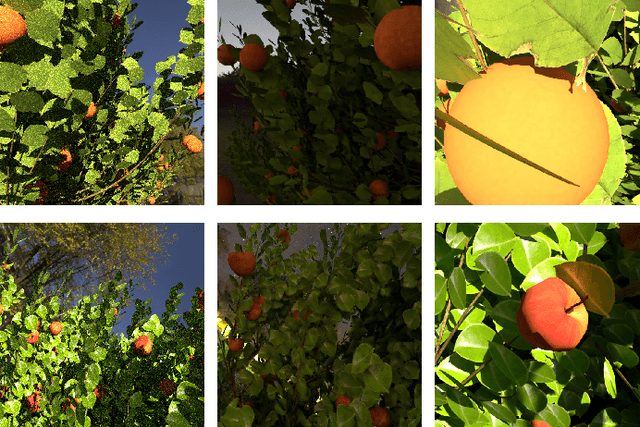
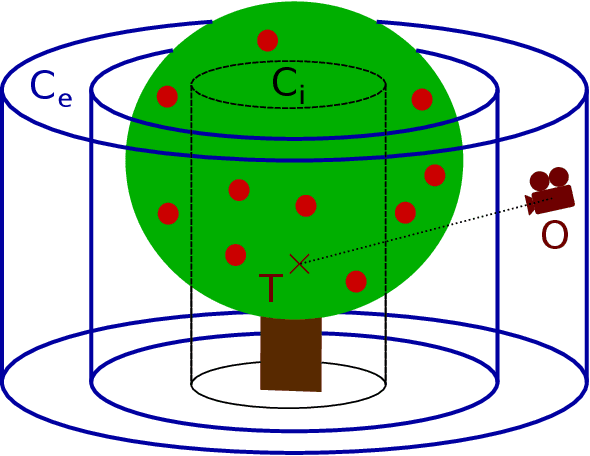
We propose a procedural fruit tree rendering framework, based on Blender and Python scripts allowing to generate quickly labeled dataset (i.e. including ground truth semantic segmentation). It is designed to train image analysis deep learning methods (e.g. in a robotic fruit harvesting context), where real labeled training datasets are usually scarce and existing synthetic ones are too specialized. Moreover, the framework includes the possibility to introduce parametrized variations in the model (e.g. lightning conditions, background), producing a dataset with embedded Domain Randomization aspect.
* 7th International Workshop on Image Analysis Methods in the Plant
Sciences, Jul 2019, Lyon, France. pp.4 - 5
View paper on