 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive PD Gains for Energy-Conscious Control in Physical Human-Robot Interaction
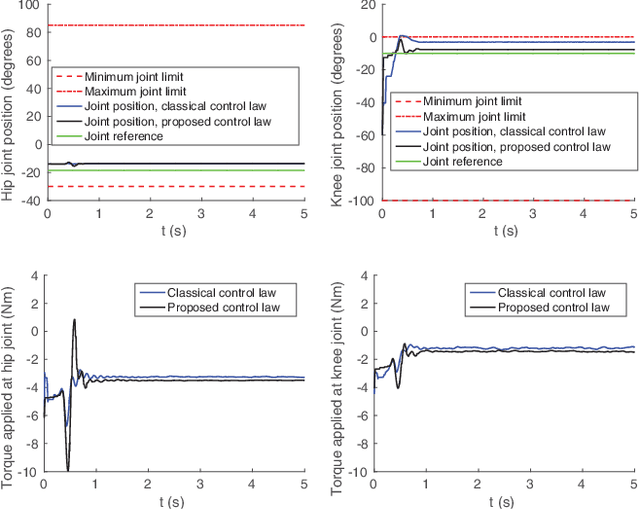
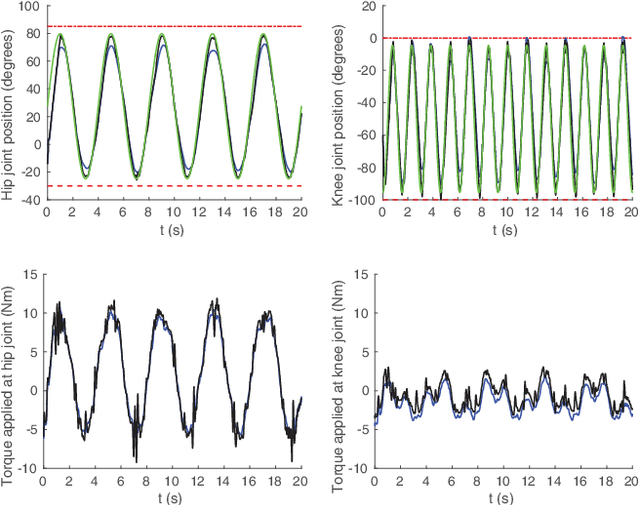
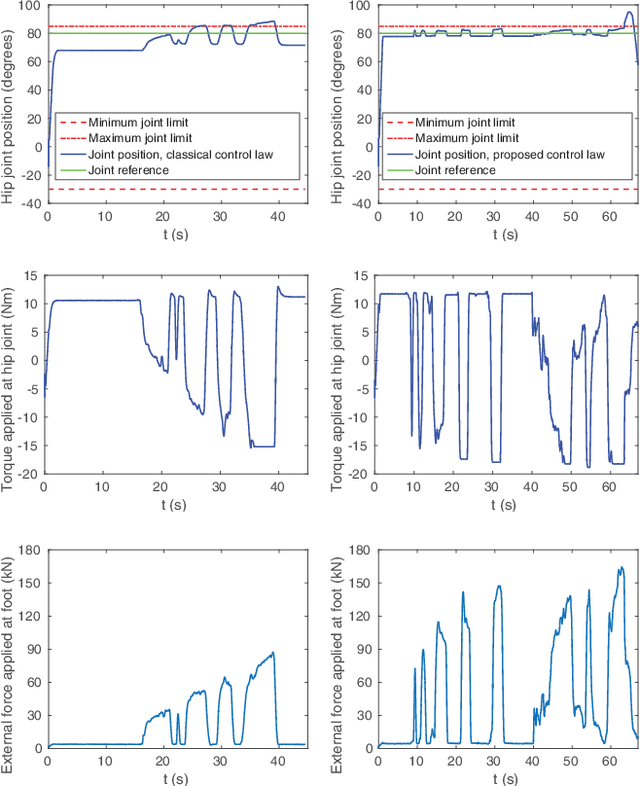
May 30, 2026Compliant force or torque control are approaches often investigated to achieve safe physical human-robot interaction (pHRI). However, these approaches have limitations. Force control requires a robot to be equipped with external force sensors to track the amplitude and direction of applied forces. Torque control requires torque sensing or estimation in each joint. As this is not available on every robot, energy-based approaches offer a promising alternative. Such approaches aim to achieve safe pHRI by limiting the mechanical energy of the robot. Current schemes leveraging an energy-based approach tend to have a complex implementation, and some may require further stability verification. We hence propose an adaptive proportional-derivative (PD) controller that can limit a robot's energy under any given limit to achieve safe pHRI. The proposed controller can limit both the kinetic and potential energy of a robot, and the behaviour of the controller gains can be shaped using various parameters, defining precisely the cutoff limit and sharpness. We construct a stability proof for the controller and define a condition to ensure the controller's stability. The proposed controller's behaviour and compliance are tested on the TALOS robot from PAL Robotics both in simulation and on hardware, verifying the expected compliant and energy-limiting behaviour of the controller.
Slow waltzing with REEM-C: a physical-social human-robot interaction study of robot-to-human communication
Aug 09, 2024Humans often work closely together and relay a wealth of information through physical interaction. Robots, on the other hand, have not yet been developed to work similarly closely with humans, and to effectively convey information when engaging in physical human-robot interaction (pHRI). This currently limits the potential of physical human-robot collaboration to solve real-world problems. This paper investigates the question of how to establish clear and intuitive robot-to-human communication, while ensuring human comfort during pHRI. We approach this question from the perspective of a leader-follower scenario, in which a full-body humanoid robot leads a slow waltz dance by signaling the next steps to a human partner. This is achieved through the development of a whole-body control framework combining admittance and impedance control, which allows for different communication modalities including haptic, visual, and audio signals. Participant experiments allowed to validate the performance of the controller, and to understand what types of communication work better in terms of effectiveness and comfort during robot-led pHRI.
The path towards contact-based physical human-robot interaction
Jul 02, 2024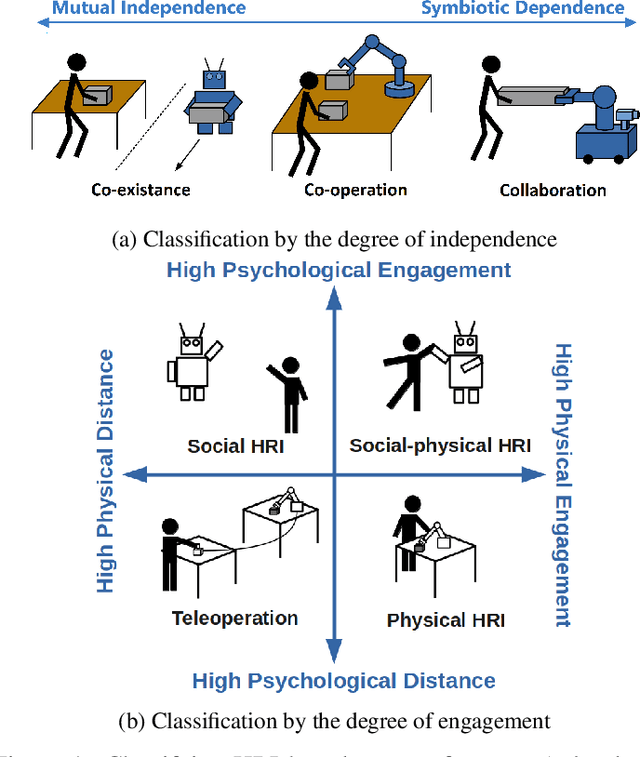

With the advancements in human-robot interaction (HRI), robots are now capable of operating in close proximity and engaging in physical interactions with humans (pHRI). Likewise, contact-based pHRI is becoming increasingly common as robots are equipped with a range of sensors to perceive human motions. Despite the presence of surveys exploring various aspects of HRI and pHRI, there is presently a gap in comprehensive studies that collect, organize and relate developments across all aspects of contact-based pHRI. It has become challenging to gain a comprehensive understanding of the current state of the field, thoroughly analyze the aspects that have been covered, and identify areas needing further attention. Hence, the present survey. While it includes key developments in pHRI, a particular focus is placed on contact-based interaction, which has numerous applications in industrial, rehabilitation and medical robotics. Across the literature, a common denominator is the importance to establish a safe, compliant and human intention-oriented interaction. This endeavour encompasses aspects of perception, planning and control, and how they work together to enhance safety and reliability. Notably, the survey highlights the application of data-driven techniques: backed by a growing body of literature demonstrating their effectiveness, approaches like reinforcement learning and learning from demonstration have become key to improving robot perception and decision-making within complex and uncertain pHRI scenarios. As the field is yet in its early stage, these observations may help guide future developments and steer research towards the responsible integration of physically interactive robots into workplaces, public spaces, and elements of private life.
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018
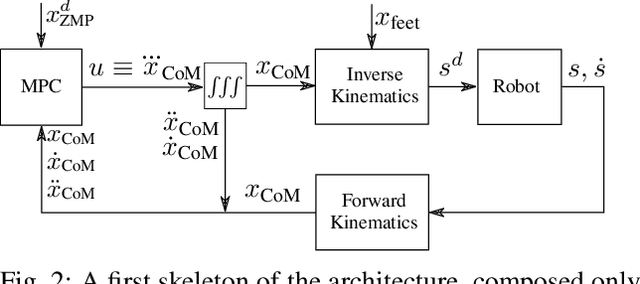
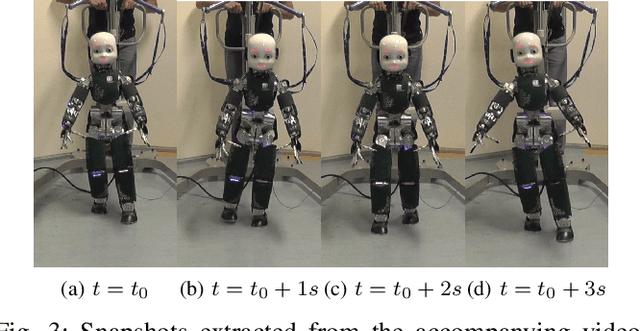
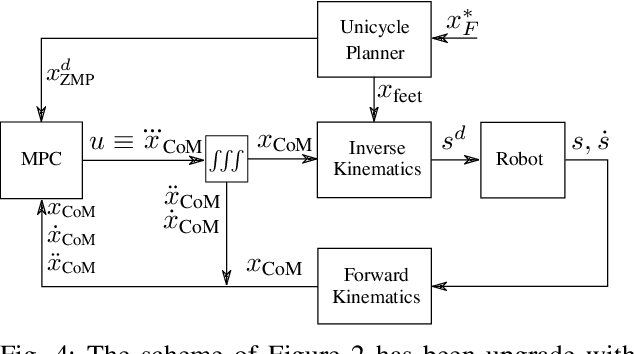
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.
On-line Joint Limit Avoidance for Torque Controlled Robots by Joint Space Parametrization
Jul 26, 2017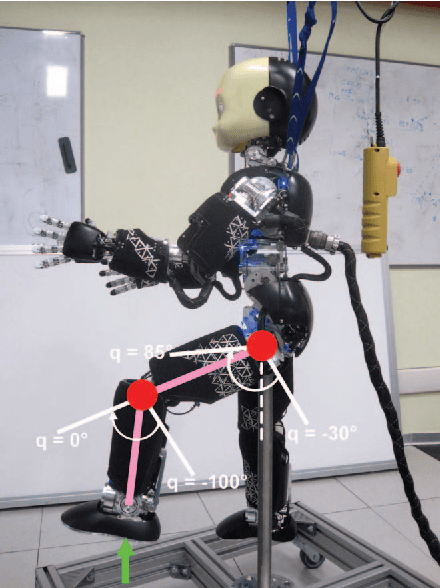
This paper proposes control laws ensuring the stabilization of a time-varying desired joint trajectory, as well as joint limit avoidance, in the case of fully-actuated manipulators. The key idea is to perform a parametrization of the feasible joint space in terms of exogenous states. It follows that the control of these states allows for joint limit avoidance. One of the main outcomes of this paper is that position terms in control laws are replaced by parametrized terms, where joint limits must be avoided. Stability and convergence of time-varying reference trajectories obtained with the proposed method are demonstrated to be in the sense of Lyapunov. The introduced control laws are verified by carrying out experiments on two degrees-of-freedom of the humanoid robot iCub.
* 8 pages, 4 figures. Submitted to the 2016 IEEE-RAS International Conference on Humanoid Robots
An Optimization Based Control Framework for Balancing and Walking: Implementation on the iCub Robot
Jul 26, 2017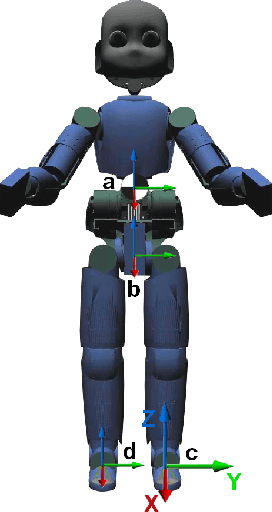
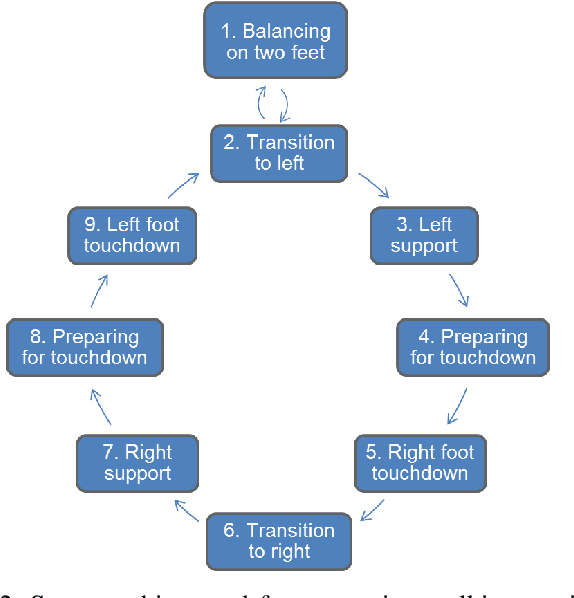
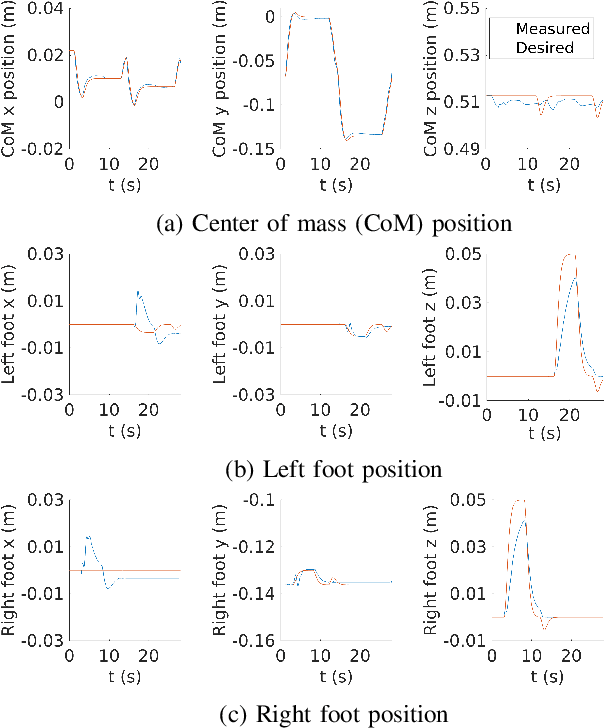
A whole-body torque control framework adapted for balancing and walking tasks is presented in this paper. In the proposed approach, centroidal momentum terms are excluded in favor of a hierarchy of high-priority position and orientation tasks and a low-priority postural task. More specifically, the controller stabilizes the position of the center of mass, the orientation of the pelvis frame, as well as the position and orientation of the feet frames. The low-priority postural task provides reference positions for each joint of the robot. Joint torques and contact forces to stabilize tasks are obtained through quadratic programming optimization. Besides the exclusion of centroidal momentum terms, part of the novelty of the approach lies in the definition of control laws in SE(3) which do not require the use of Euler parameterization. Validation of the framework was achieved in a scenario where the robot kept balance while walking in place. Experiments have been conducted with the iCub robot, in simulation and in real-world experiments.