 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe path towards contact-based physical human-robot interaction
Jul 02, 2024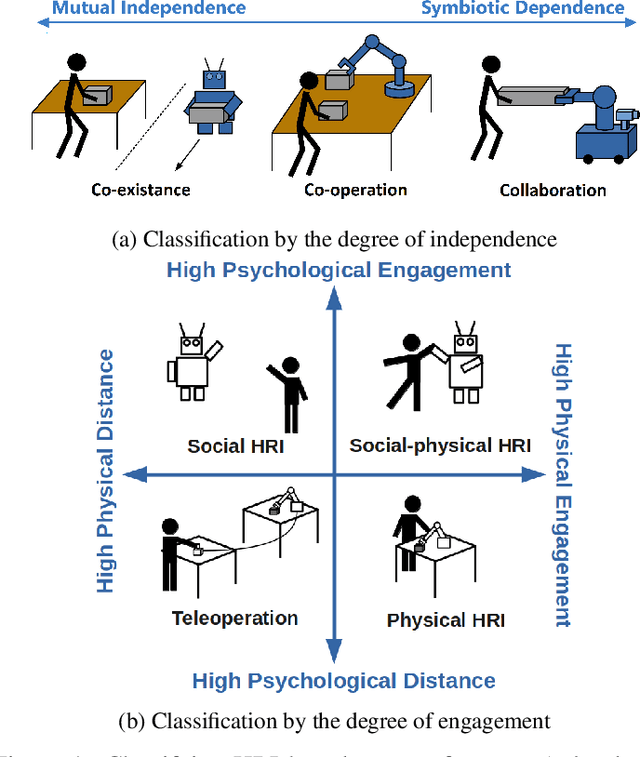
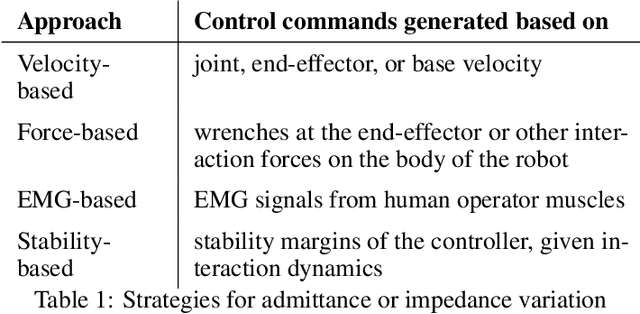

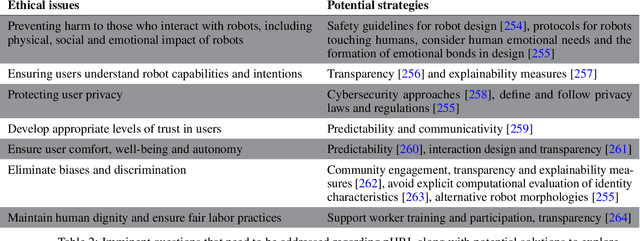
With the advancements in human-robot interaction (HRI), robots are now capable of operating in close proximity and engaging in physical interactions with humans (pHRI). Likewise, contact-based pHRI is becoming increasingly common as robots are equipped with a range of sensors to perceive human motions. Despite the presence of surveys exploring various aspects of HRI and pHRI, there is presently a gap in comprehensive studies that collect, organize and relate developments across all aspects of contact-based pHRI. It has become challenging to gain a comprehensive understanding of the current state of the field, thoroughly analyze the aspects that have been covered, and identify areas needing further attention. Hence, the present survey. While it includes key developments in pHRI, a particular focus is placed on contact-based interaction, which has numerous applications in industrial, rehabilitation and medical robotics. Across the literature, a common denominator is the importance to establish a safe, compliant and human intention-oriented interaction. This endeavour encompasses aspects of perception, planning and control, and how they work together to enhance safety and reliability. Notably, the survey highlights the application of data-driven techniques: backed by a growing body of literature demonstrating their effectiveness, approaches like reinforcement learning and learning from demonstration have become key to improving robot perception and decision-making within complex and uncertain pHRI scenarios. As the field is yet in its early stage, these observations may help guide future developments and steer research towards the responsible integration of physically interactive robots into workplaces, public spaces, and elements of private life.
Machine-Learning Identification of Hemodynamics in Coronary Arteries in the Presence of Stenosis
Nov 10, 2021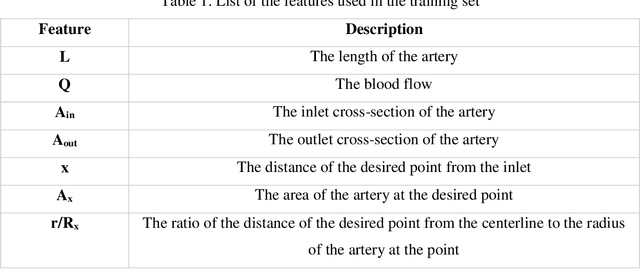
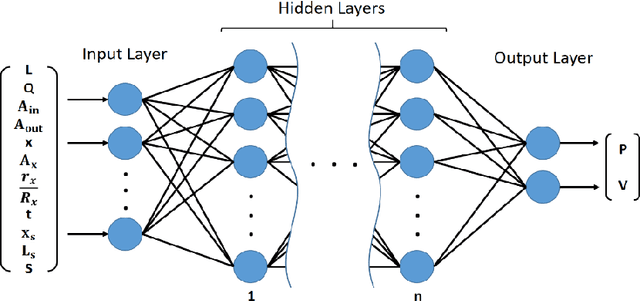
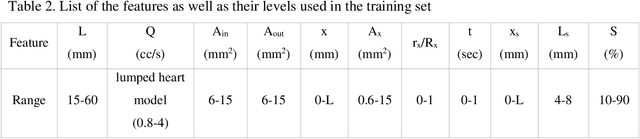
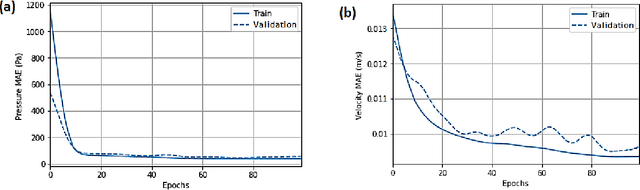
Prediction of the blood flow characteristics is of utmost importance for understanding the behavior of the blood arterial network, especially in the presence of vascular diseases such as stenosis. Computational fluid dynamics (CFD) has provided a powerful and efficient tool to determine these characteristics including the pressure and velocity fields within the network. Despite numerous studies in the field, the extremely high computational cost of CFD has led the researchers to develop new platforms including Machine Learning approaches that instead provide faster analyses at a much lower cost. In this study, we put forth a Deep Neural Network framework to predict flow behavior in a coronary arterial network with different properties in the presence of any abnormality like stenosis. To this end, an artificial neural network (ANN) model is trained using synthetic data so that it can predict the pressure and velocity within the arterial network. The data required to train the neural network were obtained from the CFD analysis of several geometries of arteries with specific features in ABAQUS software. Blood pressure drop caused by stenosis, which is one of the most important factors in the diagnosis of heart diseases, can be predicted using our proposed model knowing the geometrical and flow boundary conditions of any section of the coronary arteries. The efficiency of the model was verified using three real geometries of LAD's vessels. The proposed approach precisely predicts the hemodynamic behavior of the blood flow. The average accuracy of the pressure prediction was 98.7% and the average velocity magnitude accuracy was 93.2%. According to the results of testing the model on three patient-specific geometries, model can be considered as an alternative to finite element methods as well as other hard-to-implement and time-consuming numerical simulations.