 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlow waltzing with REEM-C: a physical-social human-robot interaction study of robot-to-human communication
Aug 09, 2024Humans often work closely together and relay a wealth of information through physical interaction. Robots, on the other hand, have not yet been developed to work similarly closely with humans, and to effectively convey information when engaging in physical human-robot interaction (pHRI). This currently limits the potential of physical human-robot collaboration to solve real-world problems. This paper investigates the question of how to establish clear and intuitive robot-to-human communication, while ensuring human comfort during pHRI. We approach this question from the perspective of a leader-follower scenario, in which a full-body humanoid robot leads a slow waltz dance by signaling the next steps to a human partner. This is achieved through the development of a whole-body control framework combining admittance and impedance control, which allows for different communication modalities including haptic, visual, and audio signals. Participant experiments allowed to validate the performance of the controller, and to understand what types of communication work better in terms of effectiveness and comfort during robot-led pHRI.
DILIGENT-KIO: A Proprioceptive Base Estimator for Humanoid Robots using Extended Kalman Filtering on Matrix Lie Groups
May 31, 2021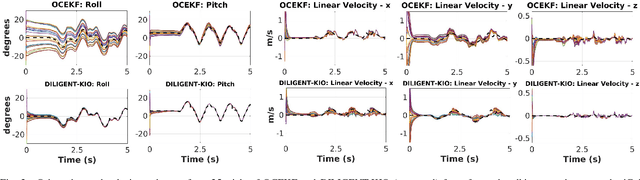
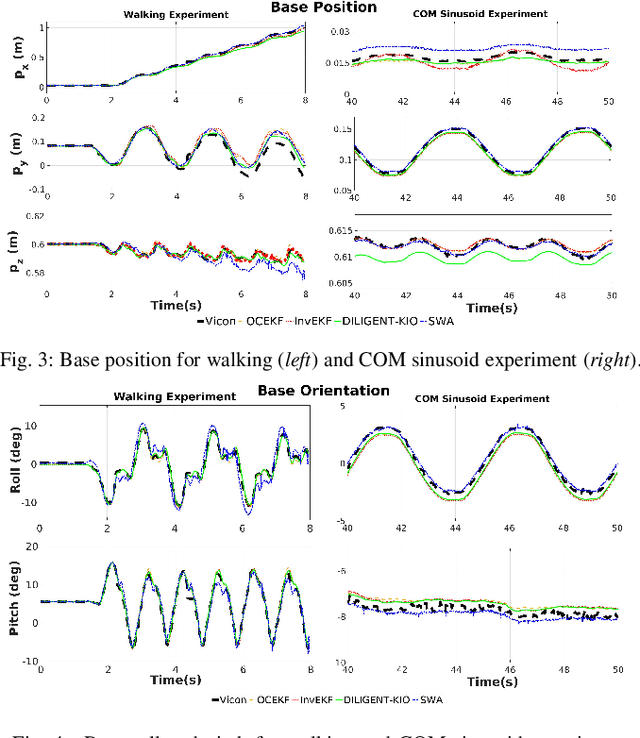
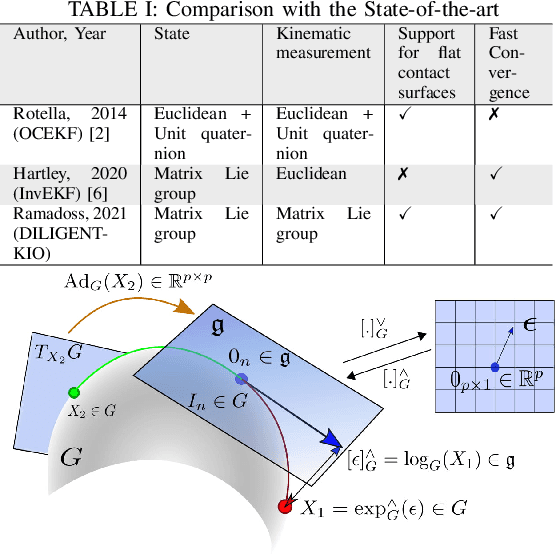

This paper presents a contact-aided inertial-kinematic floating base estimation for humanoid robots considering an evolution of the state and observations over matrix Lie groups. This is achieved through the application of a geometrically meaningful estimator which is characterized by concentrated Gaussian distributions. The configuration of a floating base system like a humanoid robot usually requires the knowledge of an additional six degrees of freedom which describes its base position-and-orientation. This quantity usually cannot be measured and needs to be estimated. A matrix Lie group, encapsulating the position-and-orientation and linear velocity of the base link, feet positions-and-orientations and Inertial Measurement Units' biases, is used to represent the state while relative positions-and-orientations of contact feet from forward kinematics are used as observations. The proposed estimator exhibits fast convergence for large initialization errors owing to choice of uncertainty parametrization. An experimental validation is done on the iCub humanoid platform.
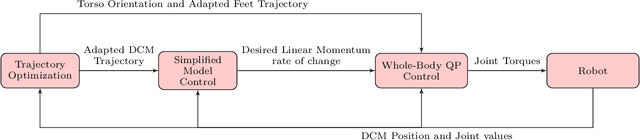
A Benchmarking of DCM Based Architectures for Position, Velocity and Torque Controlled Humanoid Robots
Nov 27, 2019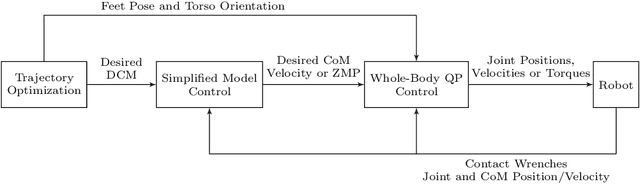

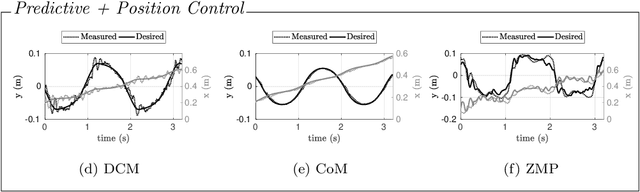

This paper contributes towards the benchmarking of control architectures for bipedal robot locomotion. It considers architectures that are based on the Divergent Component of Motion (DCM) and composed of three main layers: trajectory optimization, simplified model control, and whole-body QP control layer. While the first two layers use simplified robot models, the whole-body QP control layer uses a complete robot model to produce either desired positions, velocities, or torques inputs at the joint-level. This paper then compares two implementations of the simplified model control layer, which are tested with position, velocity, and torque control modes for the whole-body QP control layer. In particular, both an instantaneous and a Receding Horizon controller are presented for the simplified model control layer. We show also that one of the proposed architectures allows the humanoid robot iCub to achieve a forward walking velocity of 0.3372 meters per second, which is the highest walking velocity achieved by the iCub robot.
Online DCM Trajectory Generation for Push Recovery of Torque-Controlled Humanoid Robots
Oct 14, 2019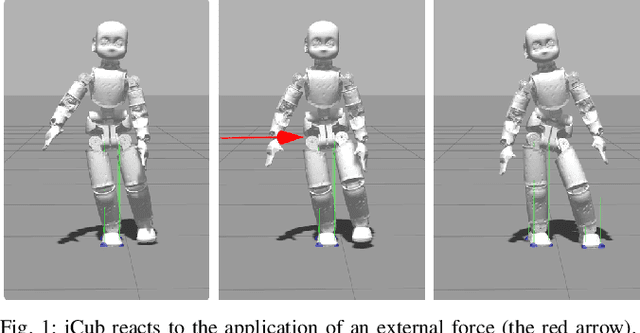
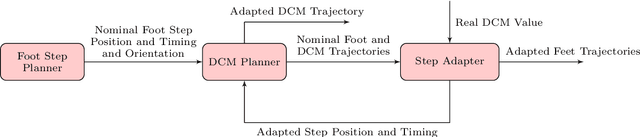
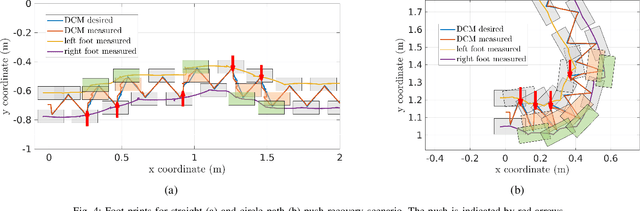
We present a computationally efficient method for online planning of bipedal walking trajectories with push recovery. In particular, the proposed methodology fits control architectures where the Divergent-Component-of-Motion (DCM) is planned beforehand, and adds a step adapter to adjust the planned trajectories and achieve push recovery. Assuming that the robot is in a single support state, the step adapter generates new positions and timings for the next step. The step adapter is active in single support phases only, but the proposed torque-control architecture considers double support phases too. The key idea for the design of the step adapter is to impose both initial and final DCM step values using an exponential interpolation of the time varying ZMP trajectory.This allows us to cast the push recovery problem as a Quadratic Programming (QP) one, and to solve it online with state-of-the-art optimisers. The overall approach is validated with simulations of the torque-controlled 33 kg humanoid robot iCub. Results show that the proposed strategy prevents the humanoid robot from falling while walking at 0.28 m/s and pushed with external forces up to 150 Newton for 0.05 seconds.
Whole-Body Geometric Retargeting for Humanoid Robots
Sep 22, 2019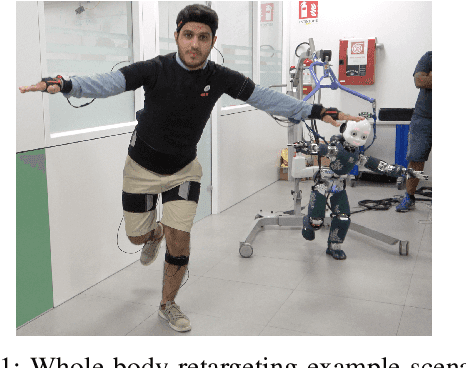
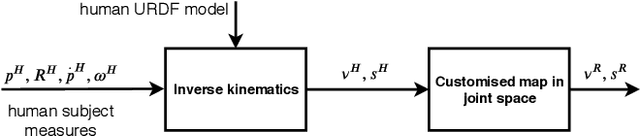

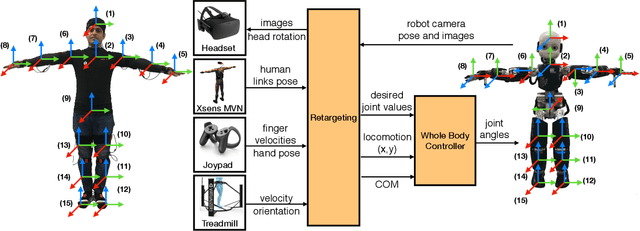
Humanoid robot teleoperation allows humans to integrate their cognitive capabilities with the apparatus to perform tasks that need high strength, manoeuvrability and dexterity. This paper presents a framework for teleoperation of humanoid robots using a novel approach for motion retargeting through inverse kinematics over the robot model. The proposed method enhances scalability for retargeting, i.e., it allows teleoperating different robots by different human users with minimal changes to the proposed system. Our framework enables an intuitive and natural interaction between the human operator and the humanoid robot at the configuration space level. We validate our approach by demonstrating whole-body retargeting with multiple robot models. Furthermore, we present experimental validation through teleoperation experiments using two state-of-the-art whole-body controllers for humanoid robots.
* Equal author contribution from Kourosh Darvish and Yeshasvi Tirupachuri
Jerk Control of Floating Base Systems with Contact-Stable Parametrised Force Feedback
Jul 27, 2019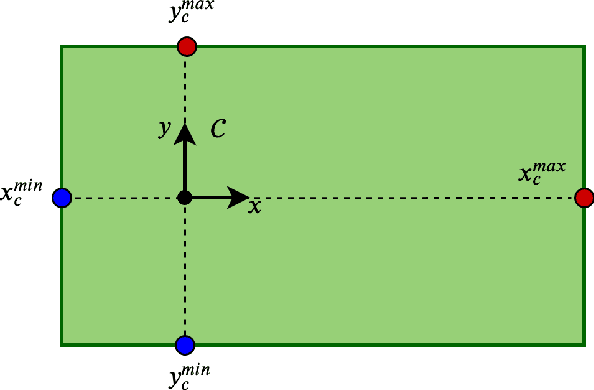

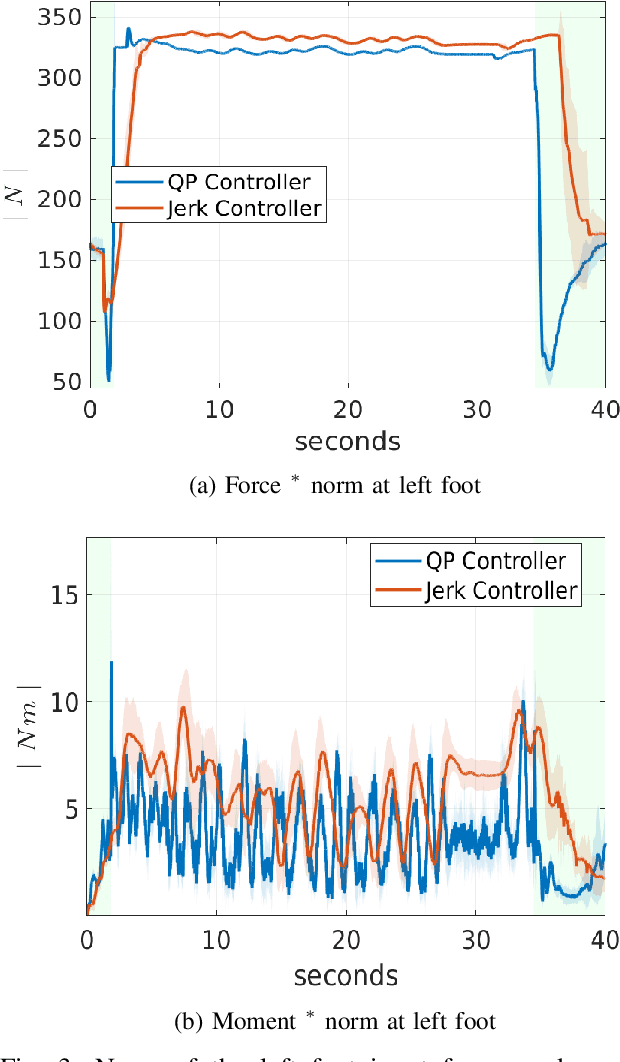
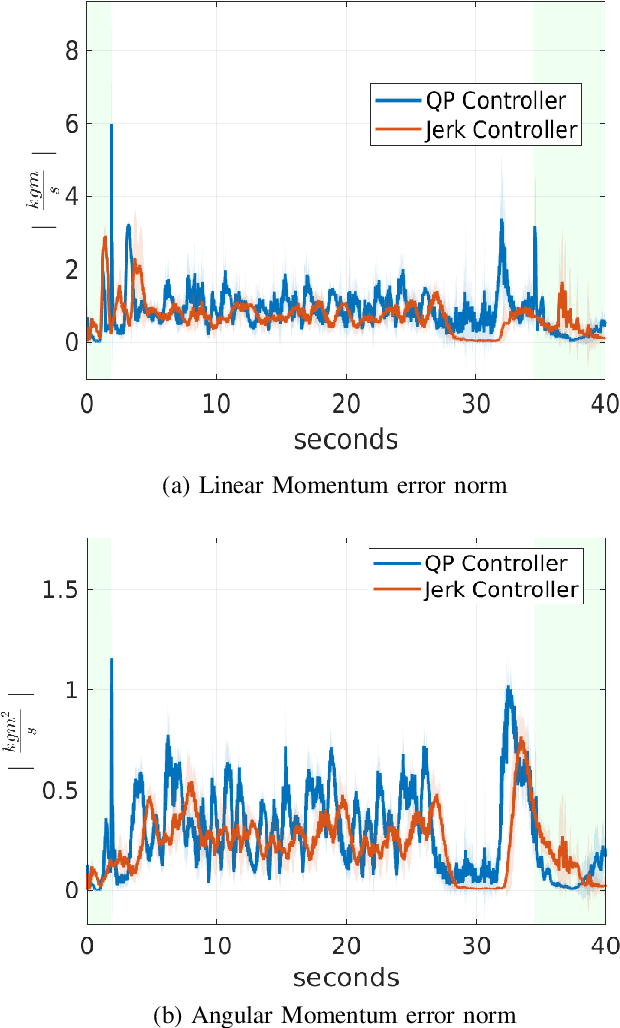
Nonlinear controllers for floating base systems in contact with the environment are often framed as quadratic programming (QP) optimization problems. Common drawbacks of such QP based controllers are: the friction cone constraints are approximated with a set of linear inequalities; the control input often experiences discontinuities; no force feedback from Force/Torque (FT) sensors installed on the robot is taken into account. This paper attempts at addressing these limitations through the design of jerk controllers. These controllers assume the rate-of-change of the joint torques as control input, and exploit the system position, velocity, accelerations, and contact wrenches as measurable quantities. The key ingredient of the presented approach is a one-to-one correspondence between free variables and the manifold defined by the contact stability constraints. This parametrisation allows us to transform the underlying constrained optimisation problems into one that is unconstrained. Then, we propose a jerk control framework that exploits the proposed parametrisation and uses FT measurements in the control loop. Furthermore, we present Lyapunov stable controllers for the system momentum in the jerk control framework. The approach is validated with simulations and experiments using the iCub humanoid robot.
Model Based In Situ Calibration with Temperature compensation of 6 axis Force Torque Sensors
Dec 03, 2018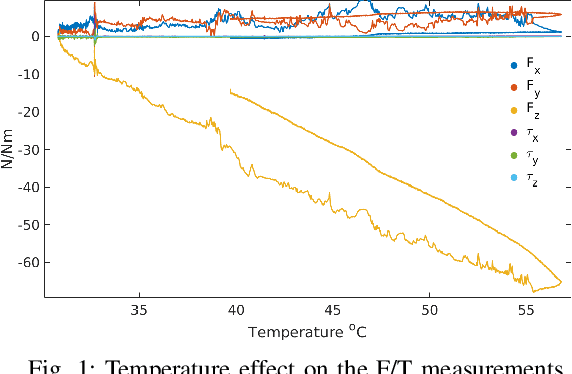
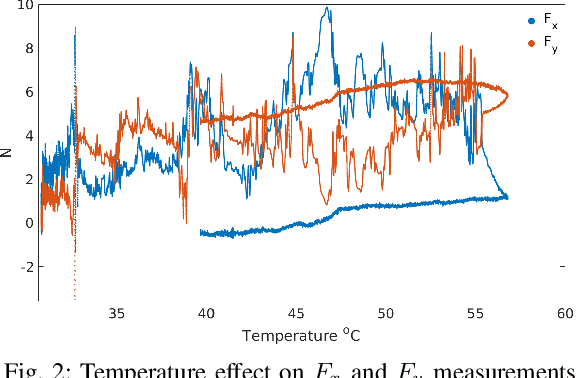
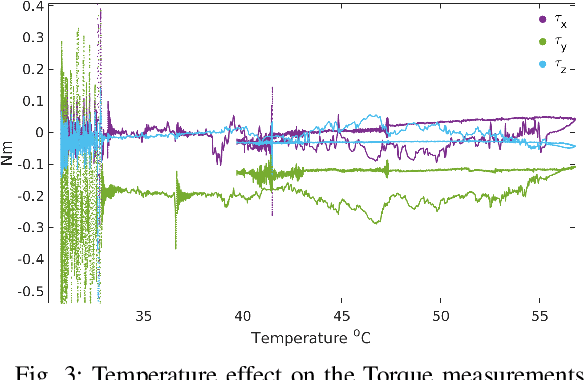
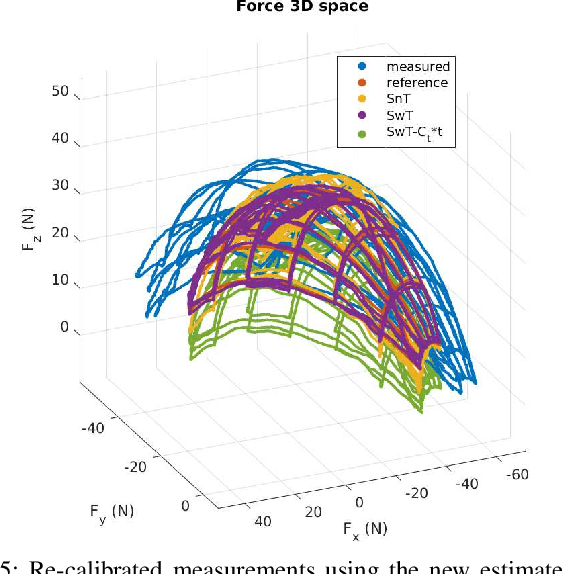
It is well known that sensors using strain gauges have a potential dependency on temperature. This creates temperature drift in the measurements of six axis force torque sensors (F/T). The temperature drift can be considerable if an experiment is long or the environmental conditions are different from when the calibration of the sensor was performed. Other \textit{in situ} methods disregard the effect of temperature on the sensor measurements. Experiments performed using the humanoid robot platform iCub show that the effect of temperature is relevant. The model based \textit{in situ} calibration of six axis force torque sensors method is extended to perform temperature compensation.
Contact Force and Joint Torque Estimation Using Skin
Sep 20, 2017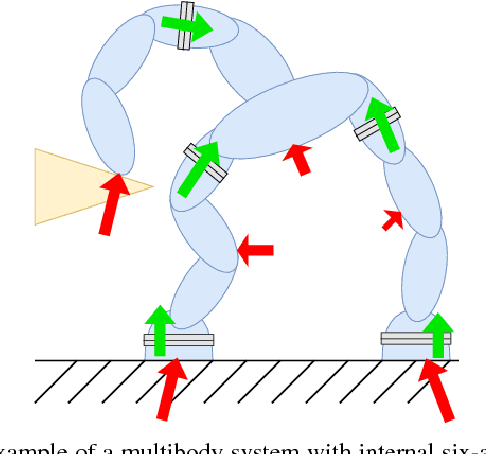
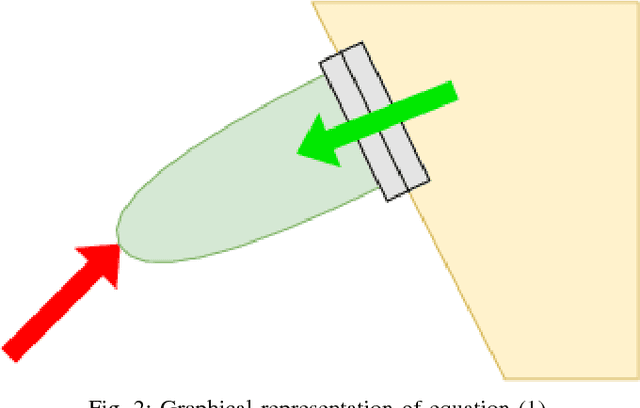
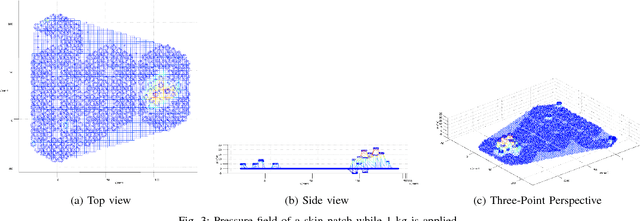
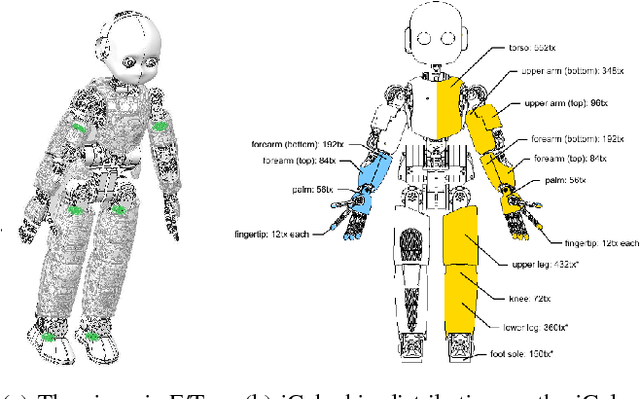
In this paper, we present algorithms to estimate external contact forces and joint torques using only skin, i.e. distributed tactile sensors. To deal with gaps between the tactile sensors (taxels), we use interpolation techniques. The application of these interpolation techniques allows us to estimate contact forces and joint torques without the need for expensive force-torque sensors. Validation was performed using the iCub humanoid robot.
Model Based In Situ Calibration of Six Axis Force Torque Sensors
Oct 27, 2016
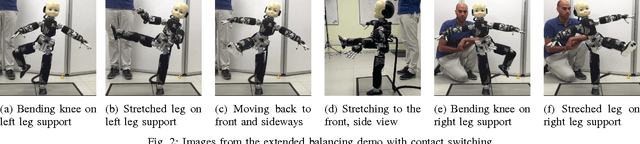
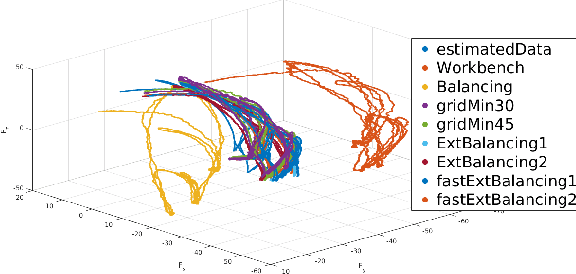
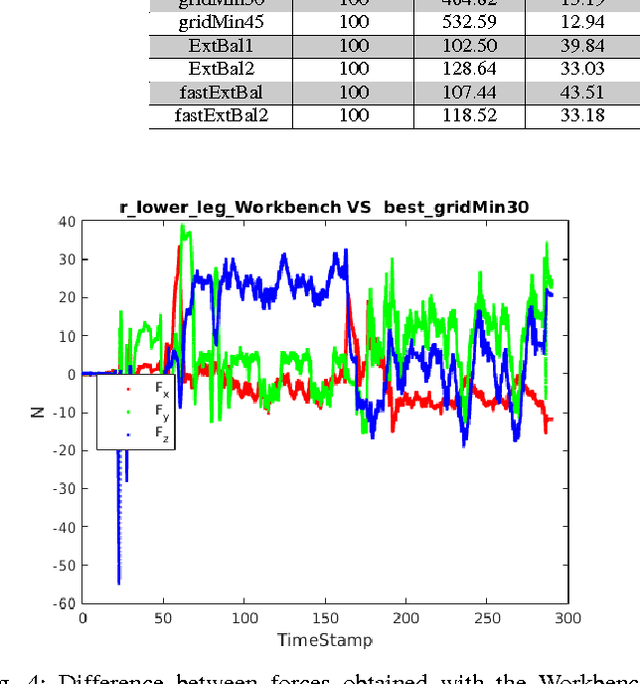
This paper proposes and validates an in situ calibration method to calibrate six axis force torque (F/T) sensors once they are mounted on the system. This procedure takes advantage of the knowledge of the model of the robot to generate the expected wrenches of the sensors during some arbitrary motions. It then uses this information to train and validate new calibration matrices, taking into account the calibration matrix obtained with a classical Workbench calibration. The proposed calibration algorithm is validated on the F/T sensors mounted on the iCub humanoid robot legs.