 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-Body Geometric Retargeting for Humanoid Robots
Paper and Code
Sep 22, 2019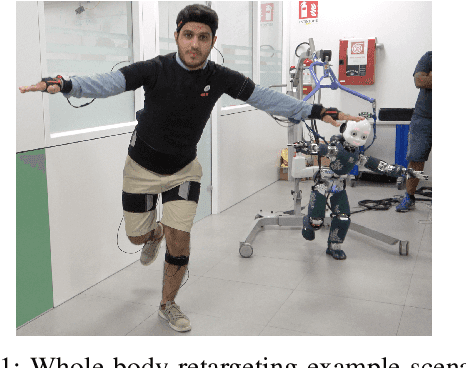
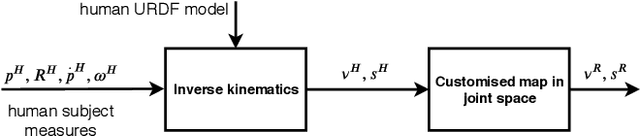

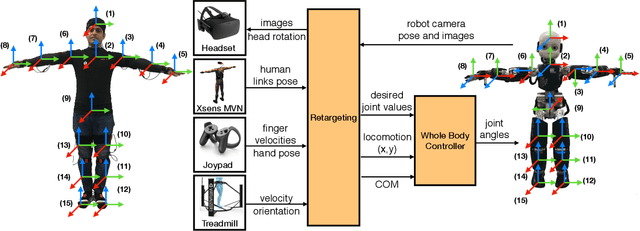
Humanoid robot teleoperation allows humans to integrate their cognitive capabilities with the apparatus to perform tasks that need high strength, manoeuvrability and dexterity. This paper presents a framework for teleoperation of humanoid robots using a novel approach for motion retargeting through inverse kinematics over the robot model. The proposed method enhances scalability for retargeting, i.e., it allows teleoperating different robots by different human users with minimal changes to the proposed system. Our framework enables an intuitive and natural interaction between the human operator and the humanoid robot at the configuration space level. We validate our approach by demonstrating whole-body retargeting with multiple robot models. Furthermore, we present experimental validation through teleoperation experiments using two state-of-the-art whole-body controllers for humanoid robots.