 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Emergence of Whole-body Strategies from Humanoid Robot Push-recovery Learning
Apr 29, 2021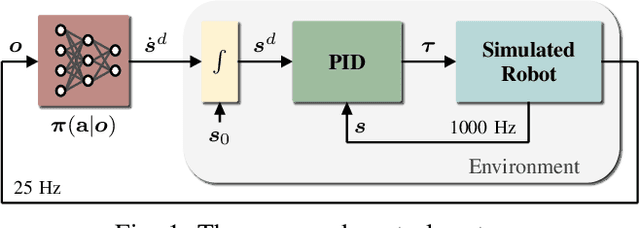
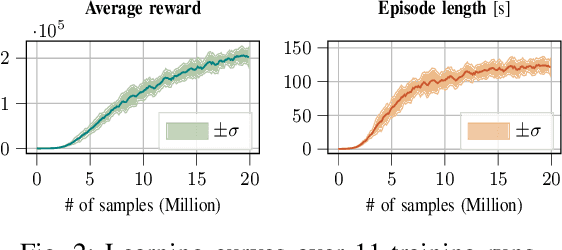
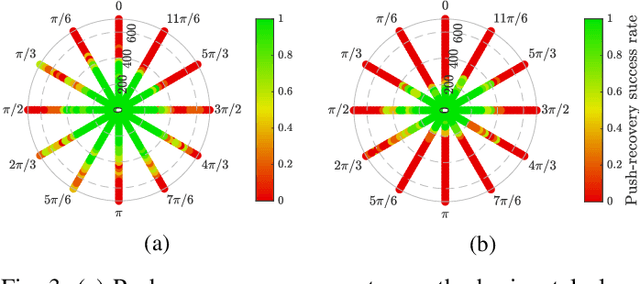
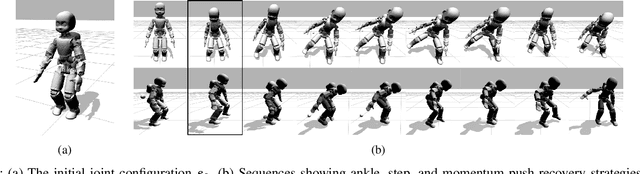
Balancing and push-recovery are essential capabilities enabling humanoid robots to solve complex locomotion tasks. In this context, classical control systems tend to be based on simplified physical models and hard-coded strategies. Although successful in specific scenarios, this approach requires demanding tuning of parameters and switching logic between specifically-designed controllers for handling more general perturbations. We apply model-free Deep Reinforcement Learning for training a general and robust humanoid push-recovery policy in a simulation environment. Our method targets high-dimensional whole-body humanoid control and is validated on the iCub humanoid. Reward components incorporating expert knowledge on humanoid control enable fast learning of several robust behaviors by the same policy, spanning the entire body. We validate our method with extensive quantitative analyses in simulation, including out-of-sample tasks which demonstrate policy robustness and generalization, both key requirements towards real-world robot deployment.
Gym-Ignition: Reproducible Robotic Simulations for Reinforcement Learning
Dec 02, 2019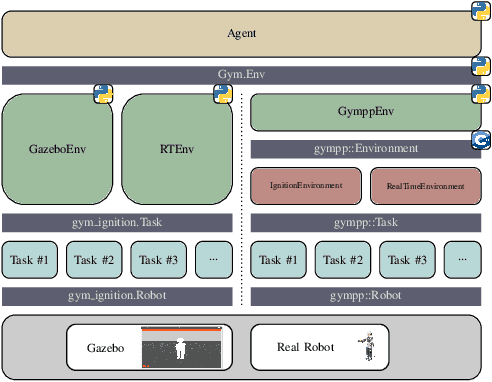
This paper presents Gym-Ignition, a new framework to create reproducible robotic environments for reinforcement learning research. It interfaces with the new generation of Gazebo, part of the Ignition Robotics suite, which provides three main improvements for reinforcement learning applications compared to the alternatives: 1) the modular architecture enables using the simulator as a C++ library, simplifying the interconnection with external software; 2) multiple physics and rendering engines are supported as plugins, simplifying their selection during the execution; 3) the new distributed simulation capability allows simulating complex scenarios while sharing the load on multiple workers and machines. The core of Gym-Ignition is a component that contains the Ignition Gazebo simulator and exposes a simple interface for its configuration and execution. We provide a Python package that allows developers to create robotic environments simulated in Ignition Gazebo. Environments expose the common OpenAI Gym interface, making them compatible out-of-the-box with third-party frameworks containing reinforcement learning algorithms. Simulations can be executed in both headless and GUI mode, the physics engine can run in accelerated mode, and instances can be parallelized. Furthermore, the Gym-Ignition software architecture provides abstraction of the Robot and the Task, making environments agnostic on the specific runtime. This abstraction allows their execution also in a real-time setting on actual robotic platforms, even if driven by different middlewares.
Whole-Body Geometric Retargeting for Humanoid Robots
Sep 22, 2019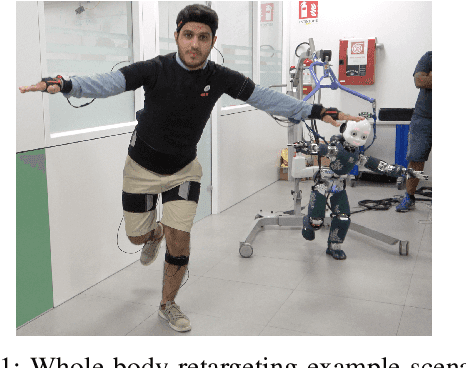
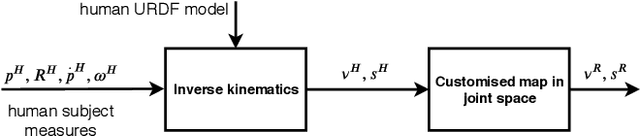

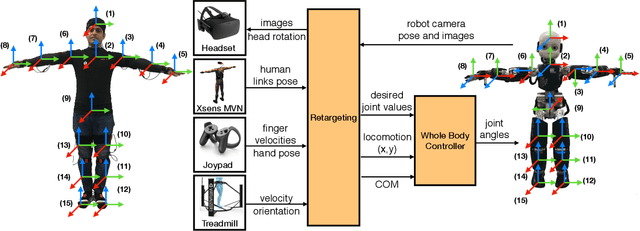
Humanoid robot teleoperation allows humans to integrate their cognitive capabilities with the apparatus to perform tasks that need high strength, manoeuvrability and dexterity. This paper presents a framework for teleoperation of humanoid robots using a novel approach for motion retargeting through inverse kinematics over the robot model. The proposed method enhances scalability for retargeting, i.e., it allows teleoperating different robots by different human users with minimal changes to the proposed system. Our framework enables an intuitive and natural interaction between the human operator and the humanoid robot at the configuration space level. We validate our approach by demonstrating whole-body retargeting with multiple robot models. Furthermore, we present experimental validation through teleoperation experiments using two state-of-the-art whole-body controllers for humanoid robots.
* Equal author contribution from Kourosh Darvish and Yeshasvi Tirupachuri
A Generic Synchronous Dataflow Architecture to Rapidly Prototype and Deploy Robot Controllers
Jun 05, 2019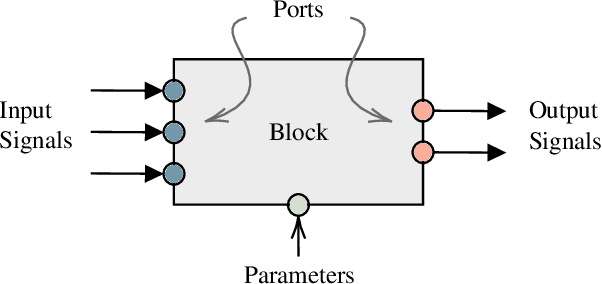
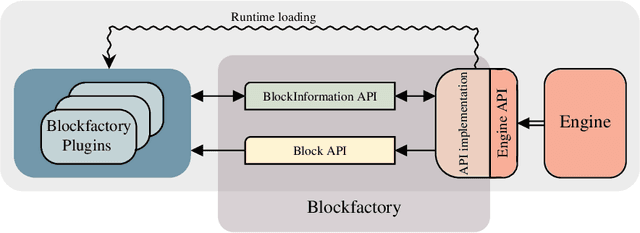
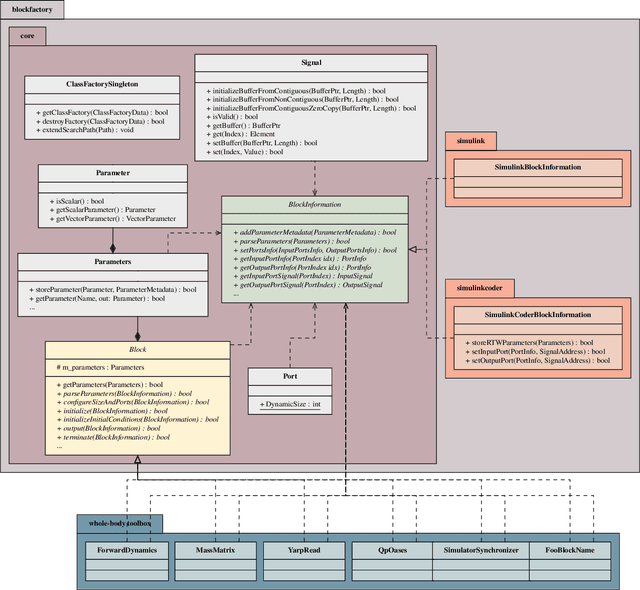
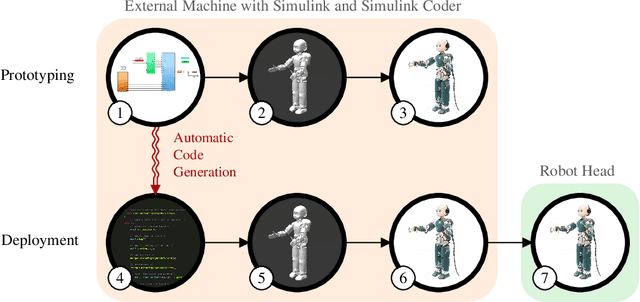
The paper presents a software architecture to optimize the process of prototyping and deploying robot controllers that are synthesized using model-based design methodologies. The architecture is composed of a framework and a pipeline. Therefore, the contribution of the paper is twofold. First, we introduce an open-source actor-oriented framework that abstracts the common robotic uses of middlewares, optimizers, and simulators. Using this framework, we then present a pipeline that implements the model-based design methodology. The components of the proposed framework are generic, and they can be interfaced with any tool supporting model-based design. We demonstrate the effectiveness of the approach describing the application of the resulting synchronous dataflow architecture to the design of a balancing controller for the YARP-based humanoid robot iCub. This example exploits the interfacing with Simulink and Simulink Coder.
Towards Partner-Aware Humanoid Robot Control Under Physical Interactions
Mar 20, 2019
The topic of physical human-robot interaction received a lot of attention from the robotics community because of many promising application domains. However, studying physical interaction between a robot and an external agent, like a human or another robot, without considering the dynamics of both the systems may lead to many short-comings in fully exploiting the interaction. In this paper, we present a coupled-dynamics formalism followed by a sound approach in exploiting helpful interaction with a humanoid robot. In particular, we propose the first attempt to define and exploit the human help for the robot to accomplish a specific task. As a result, we present a task-based partner-aware robot control techniques. The theoretical results are validated by conducting experiments with two iCub humanoid robots involved in physical interaction.
Exploiting Friction in Torque Controlled Humanoid Robots
Aug 03, 2018

A common architecture for torque controlled humanoid robots consists in two nested loops. The outer loop generates desired joint/motor torques, and the inner loop stabilises these desired values. In doing so, the inner loop usually compensates for joint friction phenomena, thus removing their inherent stabilising property that may be also beneficial for high level control objectives. This paper shows how to exploit friction for joint and task space control of humanoid robots. Experiments are carried out using the humanoid robot iCub.