 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Tracking-by-Detection of Human Motion in RGB-D Camera Networks
Jul 28, 2019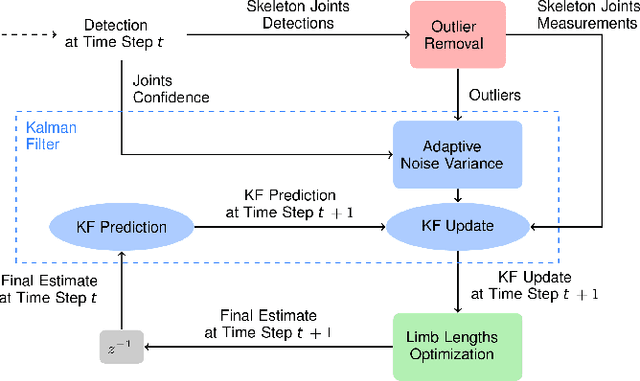
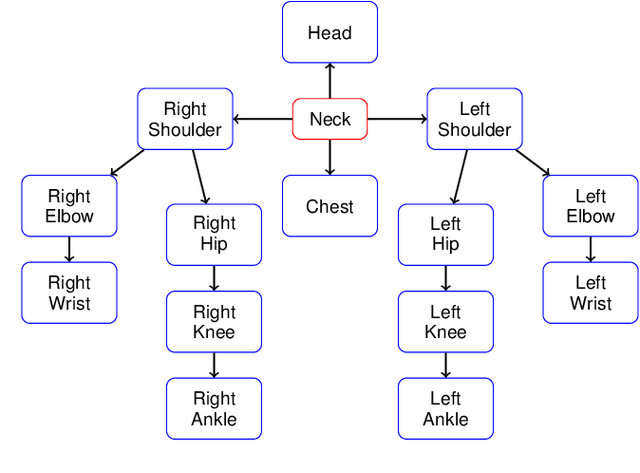
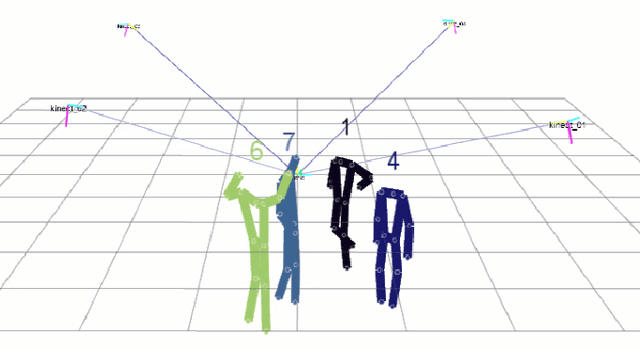
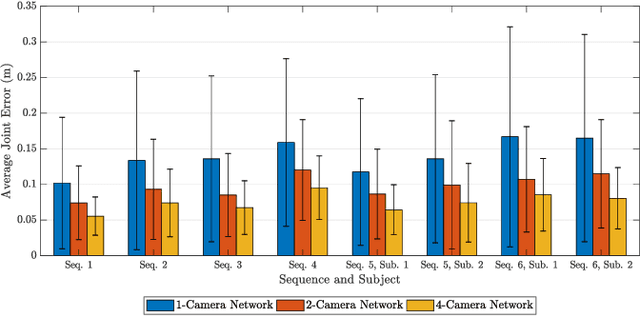
This paper presents a novel real-time tracking system capable of improving body pose estimation algorithms in distributed camera networks. The first stage of our approach introduces a linear Kalman filter operating at the body joints level, used to fuse single-view body poses coming from different detection nodes of the network and to ensure temporal consistency between them. The second stage, instead, refines the Kalman filter estimates by fitting a hierarchical model of the human body having constrained link sizes in order to ensure the physical consistency of the tracking. The effectiveness of the proposed approach is demonstrated through a broad experimental validation, performed on a set of sequences whose ground truth references are generated by a commercial marker-based motion capture system. The obtained results show how the proposed system outperforms the considered state-of-the-art approaches, granting accurate and reliable estimates. Moreover, the developed methodology constrains neither the number of persons to track, nor the number, position, synchronization, frame-rate, and manufacturer of the RGB-D cameras used. Finally, the real-time performances of the system are of paramount importance for a large number of real-world applications.
Towards Partner-Aware Humanoid Robot Control Under Physical Interactions
Mar 20, 2019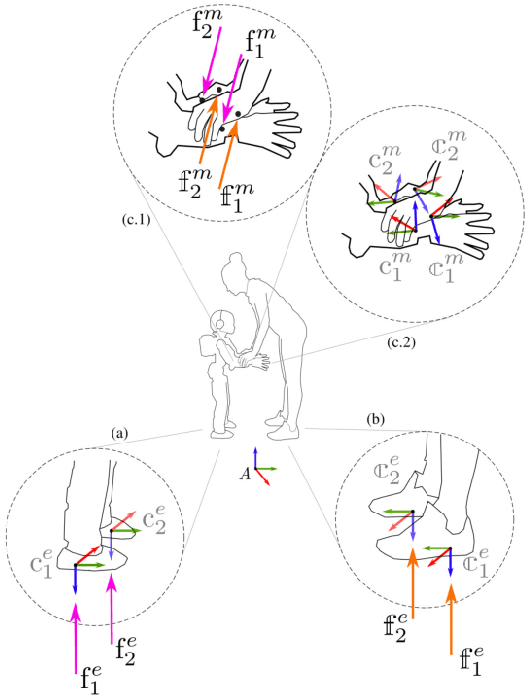
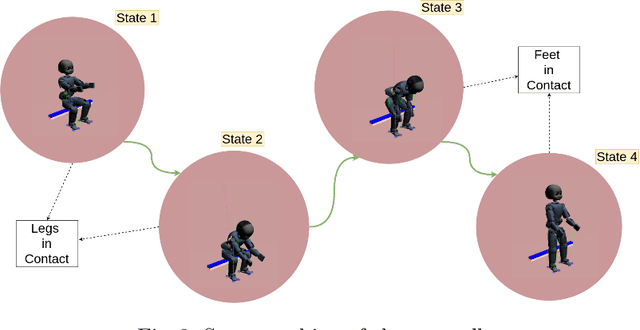
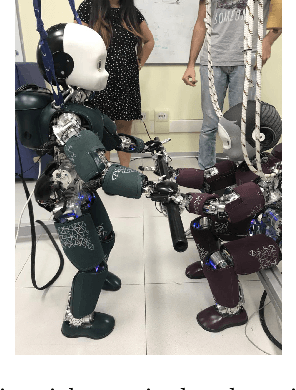
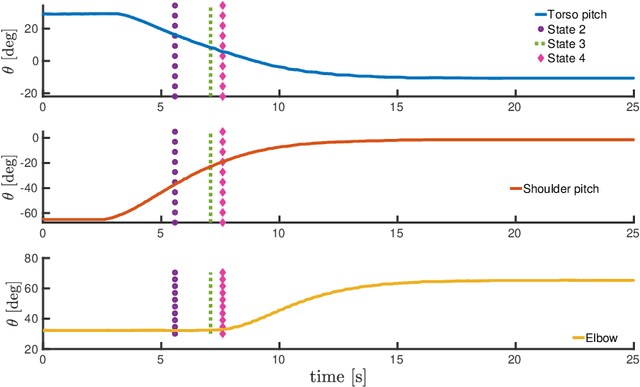
The topic of physical human-robot interaction received a lot of attention from the robotics community because of many promising application domains. However, studying physical interaction between a robot and an external agent, like a human or another robot, without considering the dynamics of both the systems may lead to many short-comings in fully exploiting the interaction. In this paper, we present a coupled-dynamics formalism followed by a sound approach in exploiting helpful interaction with a humanoid robot. In particular, we propose the first attempt to define and exploit the human help for the robot to accomplish a specific task. As a result, we present a task-based partner-aware robot control techniques. The theoretical results are validated by conducting experiments with two iCub humanoid robots involved in physical interaction.