 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecent Advances in Human-Robot Collaboration Towards Joint Action
Jan 02, 2020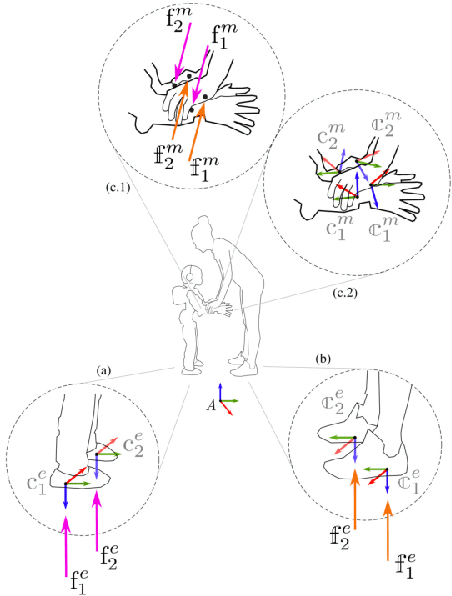

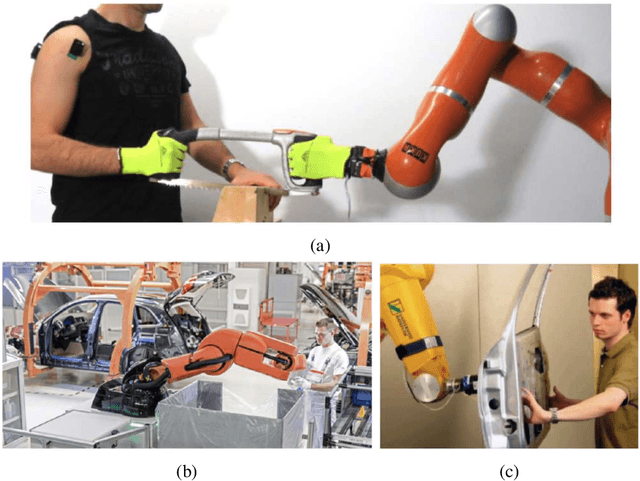
Robots existed as separate entities till now, but the horizons of a symbiotic human-robot partnership are impending. Despite all the recent technical advances in terms of hardware, robots are still not endowed with desirable relational skills that ensure a social component in their existence. This article draws from our experience as roboticists in Human-Robot Collaboration (HRC) with humanoid robots and presents some of the recent advances made towards realizing intuitive robot behaviors and partner-aware control involving physical interactions.
Human Whole-Body Dynamics Estimation for Enhancing Physical Human-Robot Interaction
Dec 03, 2019
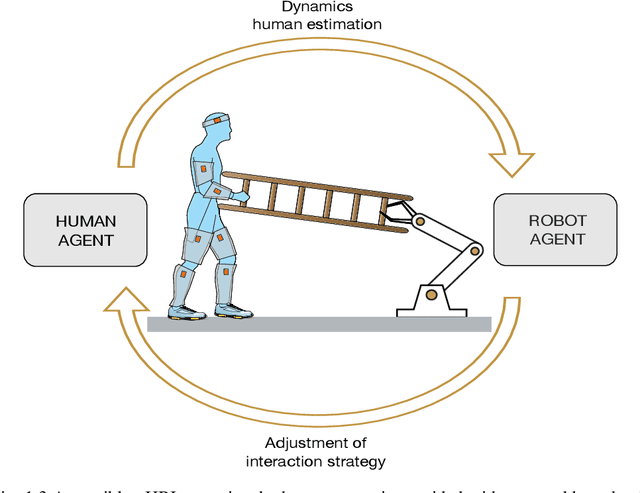
In the last two decades the scientific community has shown a great interest in understanding and shaping the interaction mechanisms between humans and robots. The interaction implies communication between two dyadic agents and, if the type of interaction is physical, the communication is represented by the set of forces exchanged during the interaction. Within this context, the role of quantifying these forces becomes of pivotal importance for understanding the interaction mechanisms. At the current scientific stage, classical robots are built to act for humans, but the scientific demand is going towards the direction of robots that will have to collaborate with humans. This will be possible by providing the robots with sufficient pieces of information of the agent they are interacting with (i.e., kinematic and dynamic model of the human). In a modern age where humans need the help of robots, apparently in an opposite trend, this thesis attempts to answer the following questions: Do robots need humans? Should robots know their human partners? A tentative answer is provided here in the form of a novel framework for the simultaneous human whole-body motion tracking and dynamics estimation, in a real-time scenario. The framework encompasses a set of body-mounted sensors and a probabilistic algorithm able of estimating physical quantities that in humans are not directly measurable (i.e., torques and internal forces). This thesis is mainly focussed on the paramount role in retrieving the human dynamics estimation but straightforwardly it leaves the door open to the next development step: passing the human dynamics feedback to the robot controllers. This step will enable the robot with the capability to observe and understand the human partner by generating an enhanced (intentional) interaction.
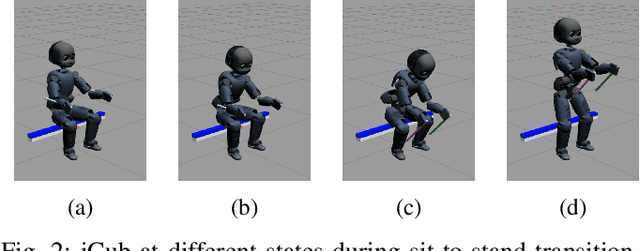
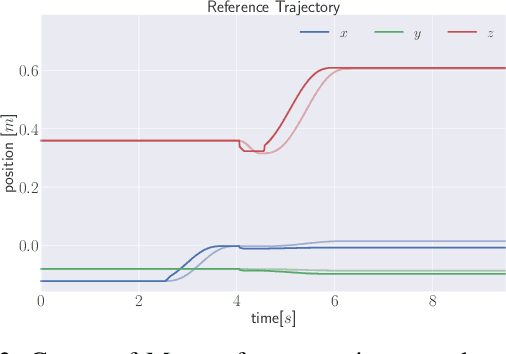
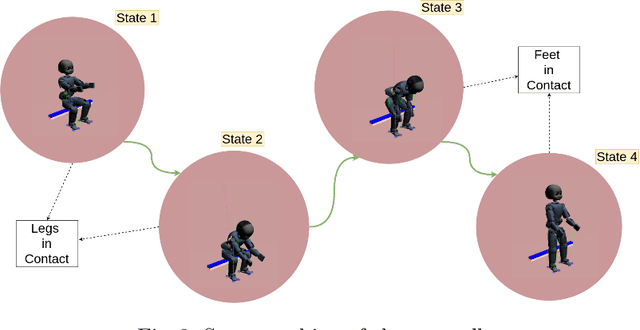
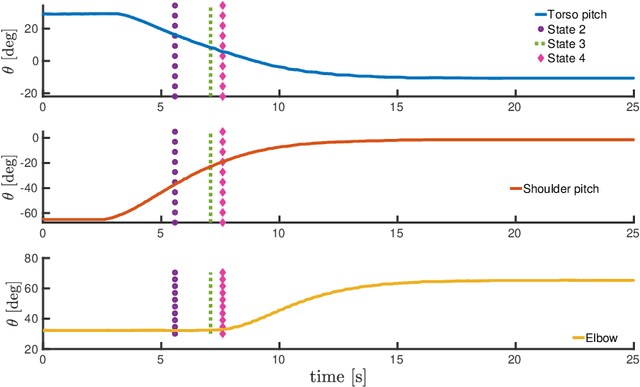
Trajectory Advancement for Robot Stand-up with Human Assistance
Oct 14, 2019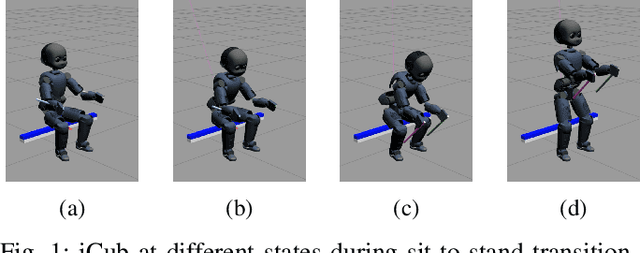
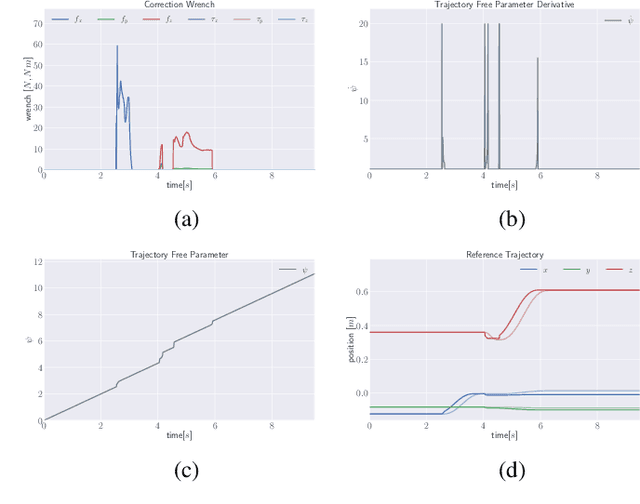
Physical interactions are inevitable part of human-robot collaboration tasks and rather than exhibiting simple reactive behaviors to human interactions, collaborative robots need to be endowed with intuitive behaviors. This paper proposes a trajectory advancement approach that facilitates advancement along a reference trajectory by leveraging assistance from helpful interaction wrench present during human-robot collaboration. We validate our approach through experiments in simulation with iCub.
Model-Based Real-Time Motion Tracking using Dynamical Inverse Kinematics
Sep 17, 2019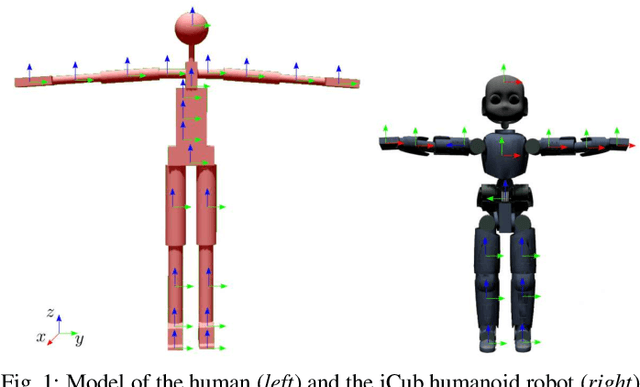
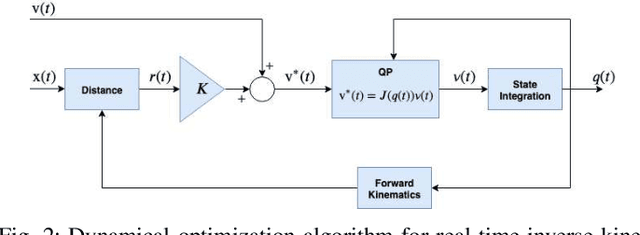
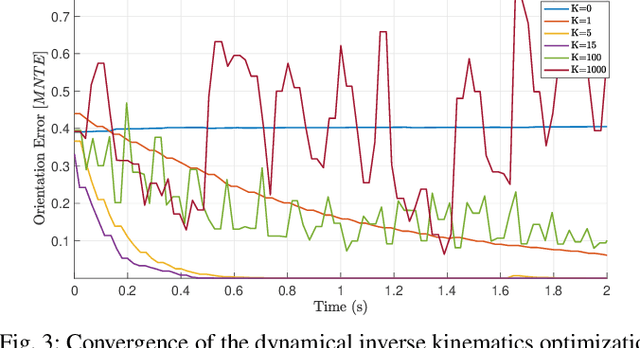
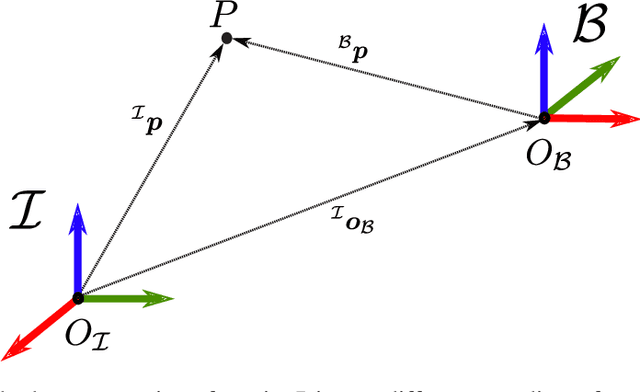
This paper contributes towards the development of motion tracking algorithms for time-critical applications, proposing an infrastructure for solving dynamically the inverse kinematics of human models. We present a method based on the integration of the differential kinematics, and for which the convergence is proved using Lyapunov analysis. The method is tested in an experimental scenario where the motion of a subject is tracked in static and dynamic configurations, and the inverse kinematics is solved both for human and humanoid models. The architecture is evaluated both terms of accuracy and computational load, and compared to iterative optimization algorithms.
Trajectory Advancement during Human-Robot Collaboration
Jul 31, 2019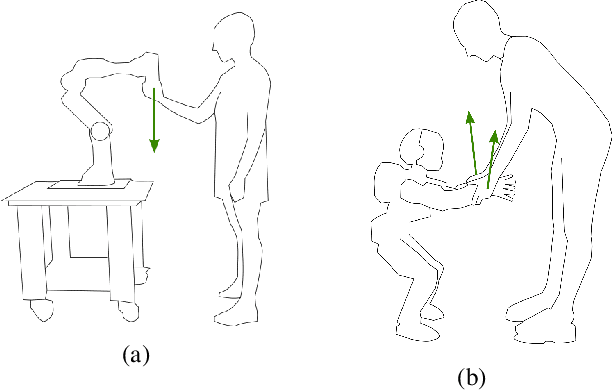
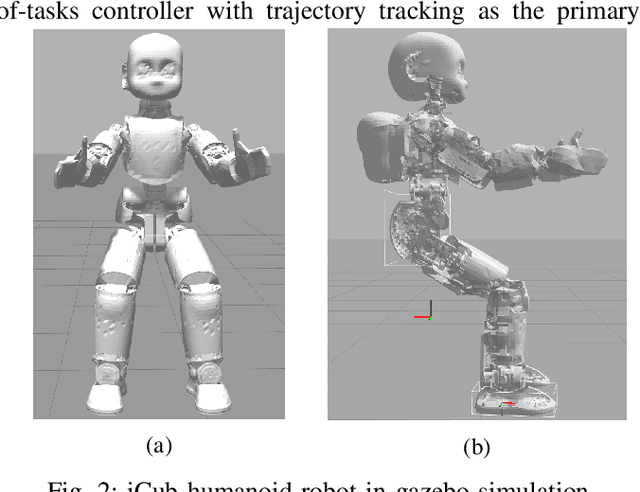
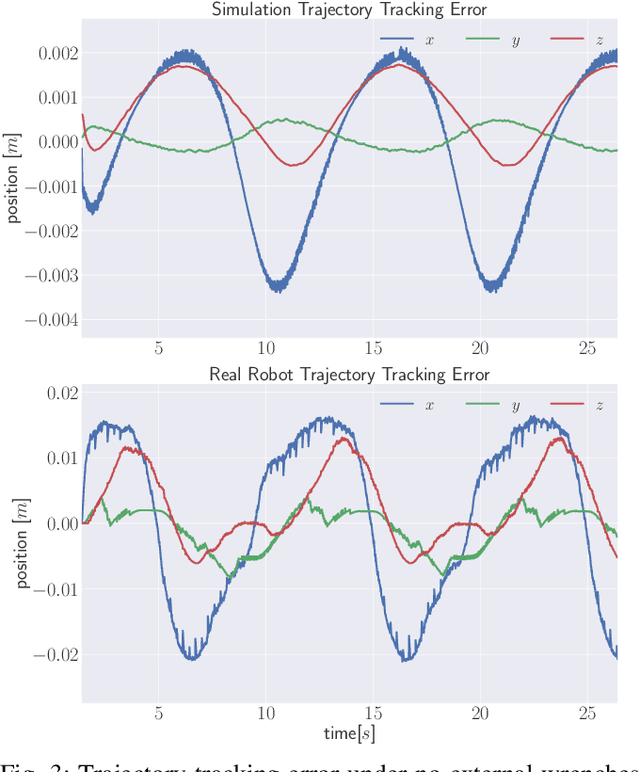
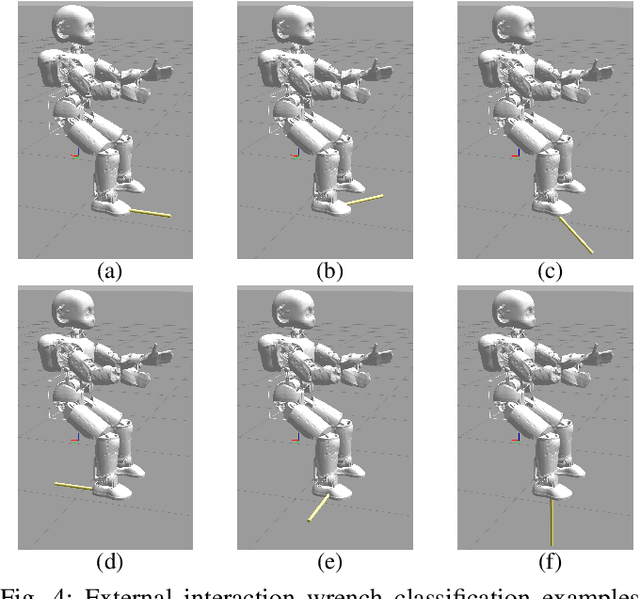
As technology advances, the barriers between the co-existence of humans and robots are slowly coming down. The prominence of physical interactions for collaboration and cooperation between humans and robots will be an undeniable fact. Rather than exhibiting simple reactive behaviors to human interactions, it is desirable to endow robots with augmented capabilities of exploiting human interactions for successful task completion. Towards that goal, in this paper, we propose a trajectory advancement approach in which we mathematically derive the conditions that facilitate advancing along a reference trajectory by leveraging assistance from helpful interaction wrench present during human-robot collaboration. We validate our approach through experiments conducted with the iCub humanoid robot both in simulation and on the real robot.
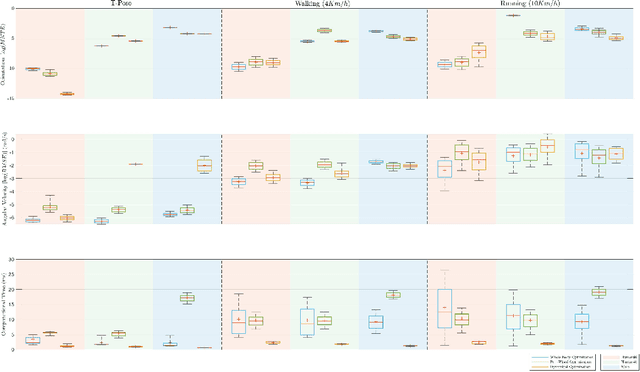
Towards Partner-Aware Humanoid Robot Control Under Physical Interactions
Mar 20, 2019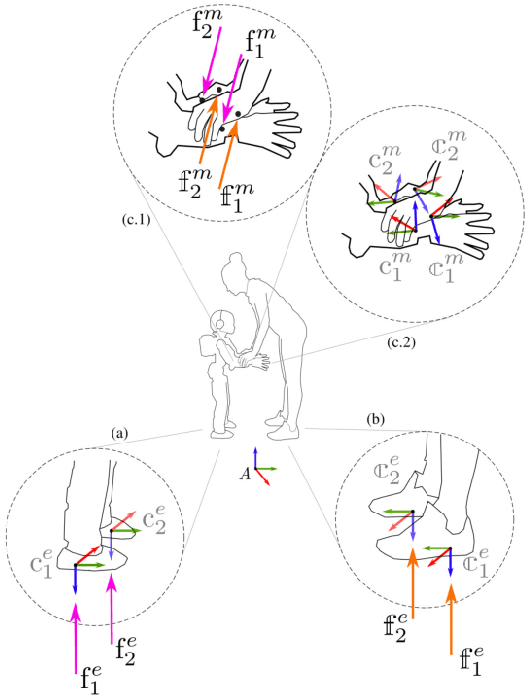
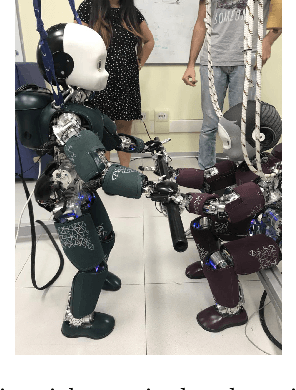
The topic of physical human-robot interaction received a lot of attention from the robotics community because of many promising application domains. However, studying physical interaction between a robot and an external agent, like a human or another robot, without considering the dynamics of both the systems may lead to many short-comings in fully exploiting the interaction. In this paper, we present a coupled-dynamics formalism followed by a sound approach in exploiting helpful interaction with a humanoid robot. In particular, we propose the first attempt to define and exploit the human help for the robot to accomplish a specific task. As a result, we present a task-based partner-aware robot control techniques. The theoretical results are validated by conducting experiments with two iCub humanoid robots involved in physical interaction.