Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Advancement for Robot Stand-up with Human Assistance
Paper and Code
Oct 14, 2019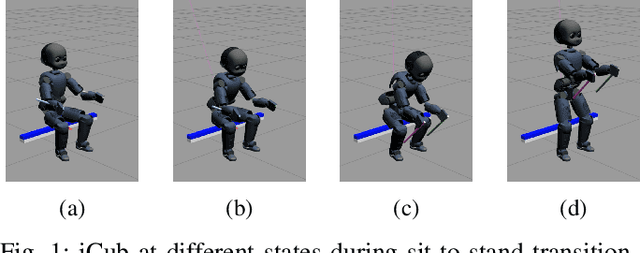
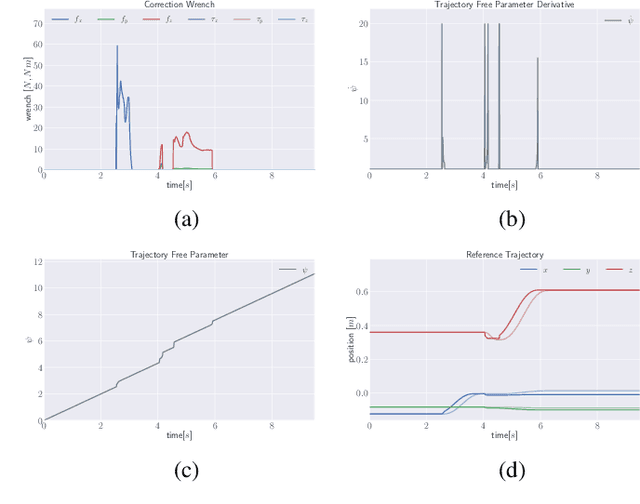
Physical interactions are inevitable part of human-robot collaboration tasks and rather than exhibiting simple reactive behaviors to human interactions, collaborative robots need to be endowed with intuitive behaviors. This paper proposes a trajectory advancement approach that facilitates advancement along a reference trajectory by leveraging assistance from helpful interaction wrench present during human-robot collaboration. We validate our approach through experiments in simulation with iCub.
* Accepted to The first Italian Robotics and Intelligent Machines
Conference (I-RIM 2019). arXiv admin note: substantial text overlap with
arXiv:1907.13445
View paper on