Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Based In Situ Calibration with Temperature compensation of 6 axis Force Torque Sensors
Paper and Code
Dec 03, 2018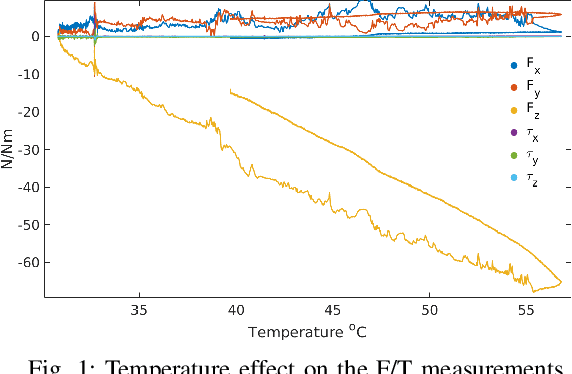
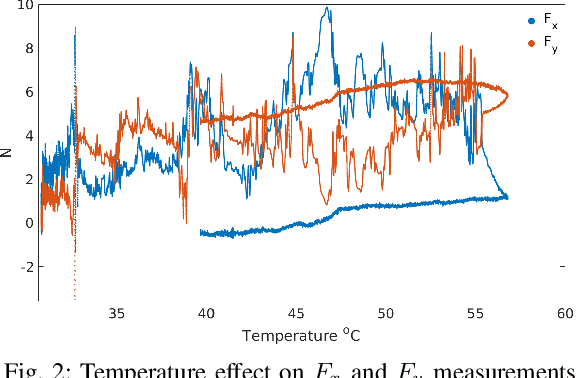
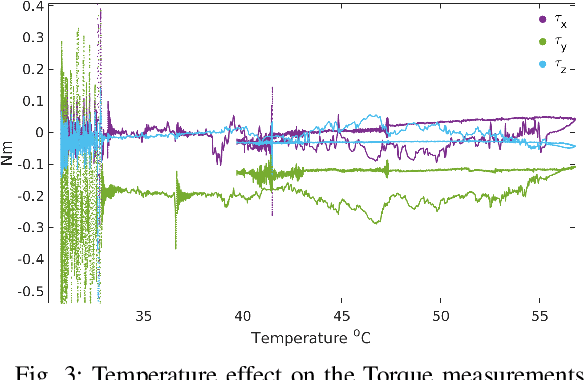
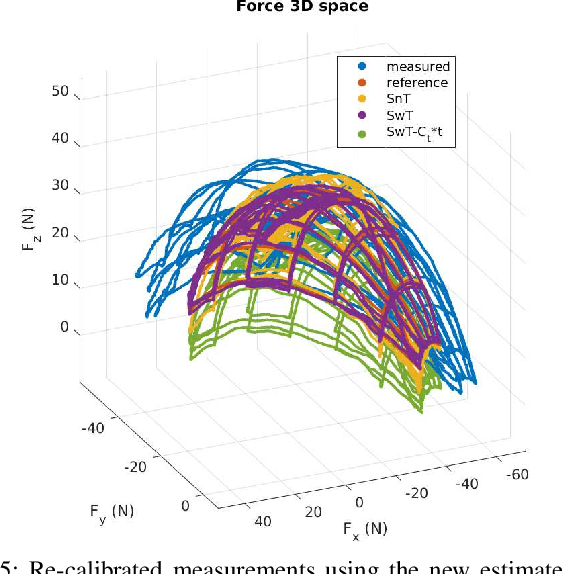
It is well known that sensors using strain gauges have a potential dependency on temperature. This creates temperature drift in the measurements of six axis force torque sensors (F/T). The temperature drift can be considerable if an experiment is long or the environmental conditions are different from when the calibration of the sensor was performed. Other \textit{in situ} methods disregard the effect of temperature on the sensor measurements. Experiments performed using the humanoid robot platform iCub show that the effect of temperature is relevant. The model based \textit{in situ} calibration of six axis force torque sensors method is extended to perform temperature compensation.
* Submitted to ICRA 2019
View paper on