Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Force and Joint Torque Estimation Using Skin
Paper and Code
Sep 20, 2017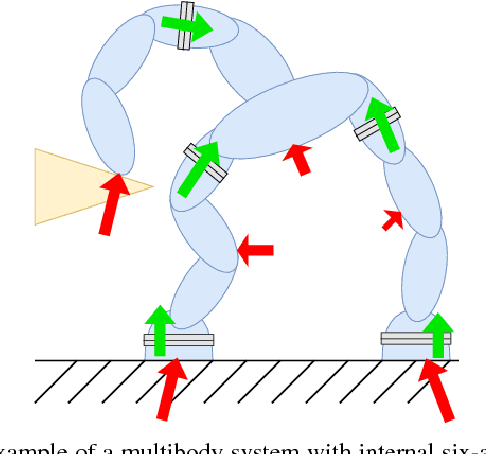
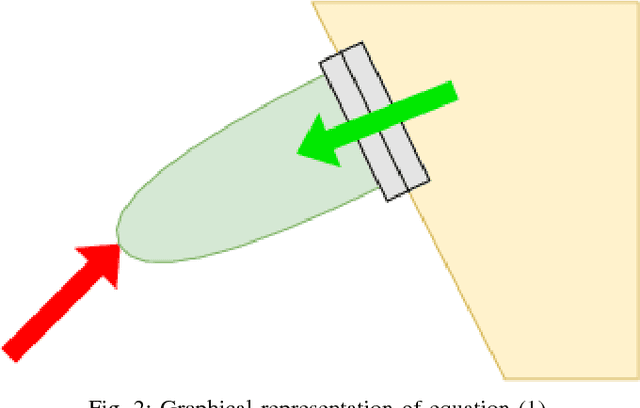
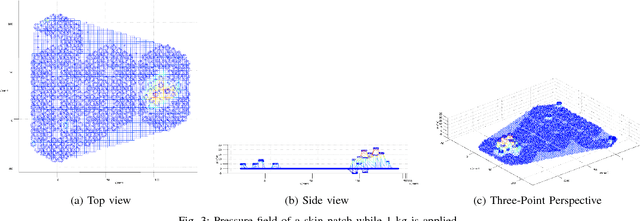
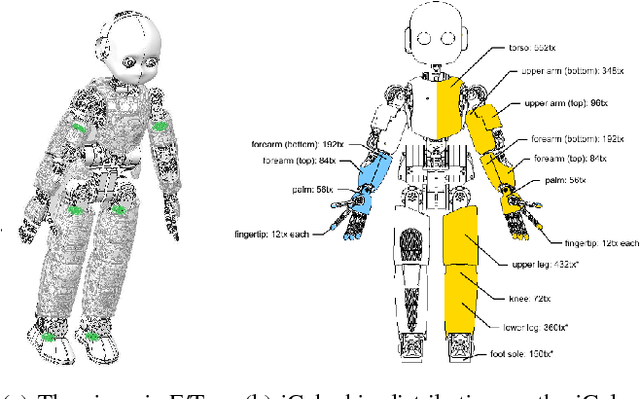
In this paper, we present algorithms to estimate external contact forces and joint torques using only skin, i.e. distributed tactile sensors. To deal with gaps between the tactile sensors (taxels), we use interpolation techniques. The application of these interpolation techniques allows us to estimate contact forces and joint torques without the need for expensive force-torque sensors. Validation was performed using the iCub humanoid robot.
* Submitted to ICRA2018
View paper on