 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompact Real-time avoidance on a Humanoid Robot for Human-robot Interaction
Jan 17, 2018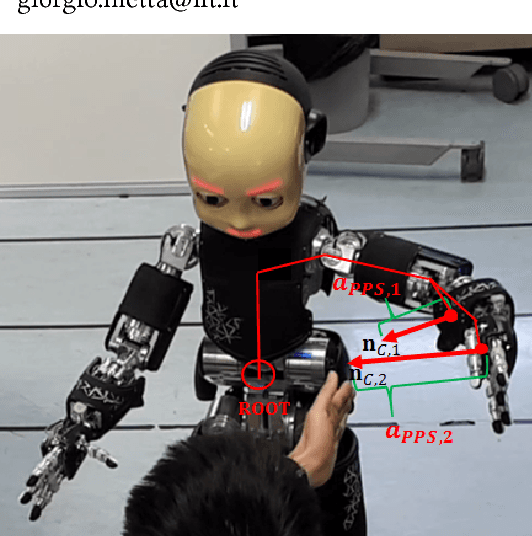
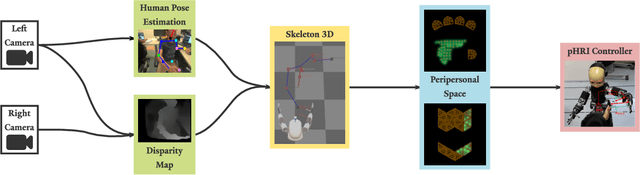
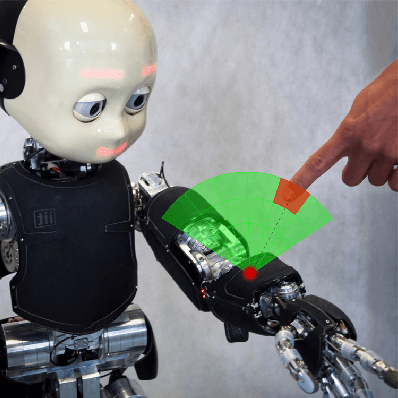
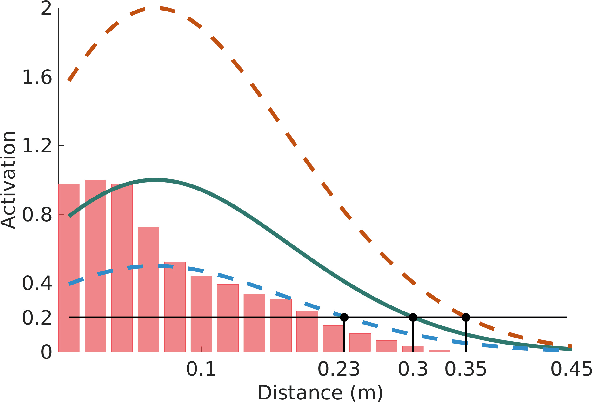
With robots leaving factories and entering less controlled domains, possibly sharing the space with humans, safety is paramount and multimodal awareness of the body surface and the surrounding environment is fundamental. Taking inspiration from peripersonal space representations in humans, we present a framework on a humanoid robot that dynamically maintains such a protective safety zone, composed of the following main components: (i) a human 2D keypoints estimation pipeline employing a deep learning based algorithm, extended here into 3D using disparity; (ii) a distributed peripersonal space representation around the robot's body parts; (iii) a reaching controller that incorporates all obstacles entering the robot's safety zone on the fly into the task. Pilot experiments demonstrate that an effective safety margin between the robot's and the human's body parts is kept. The proposed solution is flexible and versatile since the safety zone around individual robot and human body parts can be selectively modulated---here we demonstrate stronger avoidance of the human head compared to rest of the body. Our system works in real time and is self-contained, with no external sensory equipment and use of onboard cameras only.