Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiCub
Paper and Code
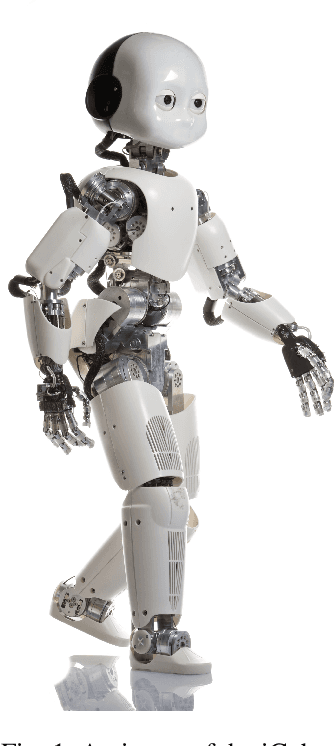
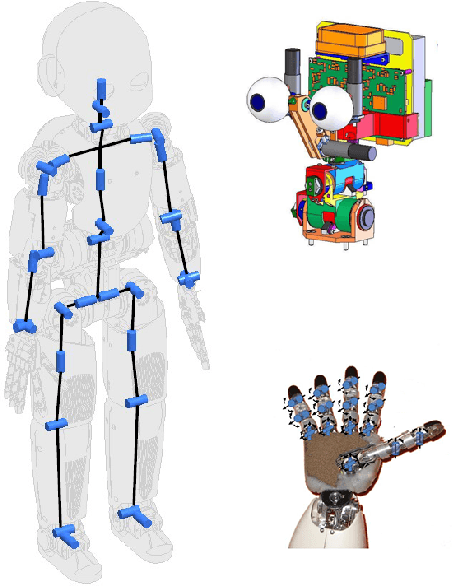
In this chapter we describe the history and evolution of the iCub humanoid platform. We start by describing the first version as it was designed during the RobotCub EU project and illustrate how it evolved to become the platform that is adopted by more than 30 laboratories world wide. We complete the chapter by illustrating some of the research activities that are currently carried out on the iCub robot, i.e. visual perception, event driven sensing and dynamic control. We conclude the Chapter with a discussion of the lessons we learned and a preview of the upcoming next release of the robot, iCub 3.0.
* Humanoid Robotics: A Reference, Springer, 2017
View paper on