 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoosting Neural Video Representation via Online Structural Reparameterization
Nov 14, 2025Neural Video Representation~(NVR) is a promising paradigm for video compression, showing great potential in improving video storage and transmission efficiency. While recent advances have made efforts in architectural refinements to improve representational capability, these methods typically involve complex designs, which may incur increased computational overhead and lack the flexibility to integrate into other frameworks. Moreover, the inherent limitation in model capacity restricts the expressiveness of NVR networks, resulting in a performance bottleneck. To overcome these limitations, we propose Online-RepNeRV, a NVR framework based on online structural reparameterization. Specifically, we propose a universal reparameterization block named ERB, which incorporates multiple parallel convolutional paths to enhance the model capacity. To mitigate the overhead, an online reparameterization strategy is adopted to dynamically fuse the parameters during training, and the multi-branch structure is equivalently converted into a single-branch structure after training. As a result, the additional computational and parameter complexity is confined to the encoding stage, without affecting the decoding efficiency. Extensive experiments on mainstream video datasets demonstrate that our method achieves an average PSNR gain of 0.37-2.7 dB over baseline methods, while maintaining comparable training time and decoding speed.
* 15 pages, 7 figures
Motion Matters: Compact Gaussian Streaming for Free-Viewpoint Video Reconstruction
May 22, 20253D Gaussian Splatting (3DGS) has emerged as a high-fidelity and efficient paradigm for online free-viewpoint video (FVV) reconstruction, offering viewers rapid responsiveness and immersive experiences. However, existing online methods face challenge in prohibitive storage requirements primarily due to point-wise modeling that fails to exploit the motion properties. To address this limitation, we propose a novel Compact Gaussian Streaming (ComGS) framework, leveraging the locality and consistency of motion in dynamic scene, that models object-consistent Gaussian point motion through keypoint-driven motion representation. By transmitting only the keypoint attributes, this framework provides a more storage-efficient solution. Specifically, we first identify a sparse set of motion-sensitive keypoints localized within motion regions using a viewspace gradient difference strategy. Equipped with these keypoints, we propose an adaptive motion-driven mechanism that predicts a spatial influence field for propagating keypoint motion to neighboring Gaussian points with similar motion. Moreover, ComGS adopts an error-aware correction strategy for key frame reconstruction that selectively refines erroneous regions and mitigates error accumulation without unnecessary overhead. Overall, ComGS achieves a remarkable storage reduction of over 159 X compared to 3DGStream and 14 X compared to the SOTA method QUEEN, while maintaining competitive visual fidelity and rendering speed. Our code will be released.
Content-Distortion High-Order Interaction for Blind Image Quality Assessment
Apr 07, 2025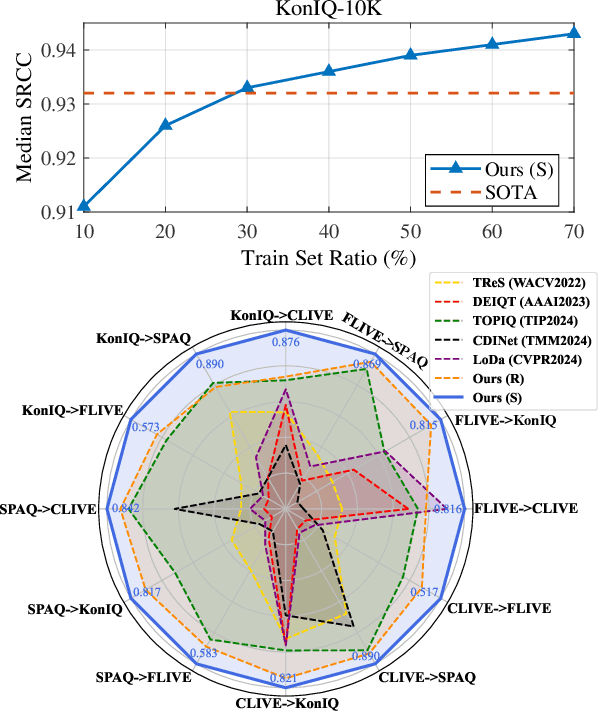
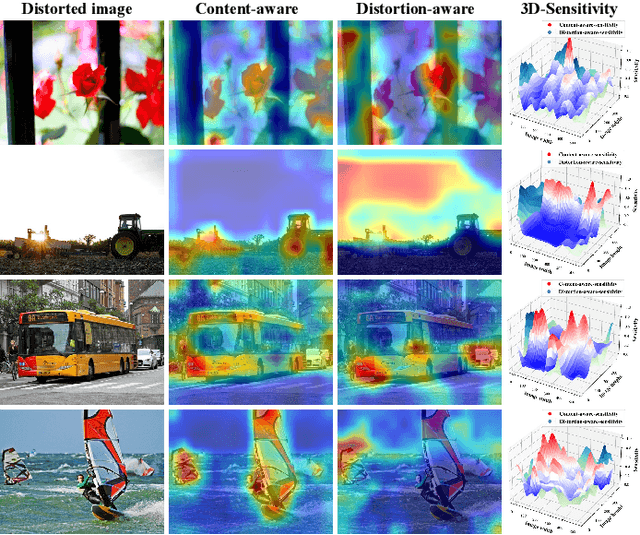
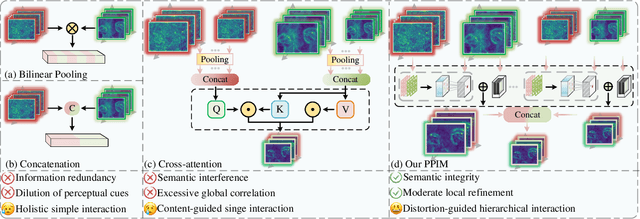
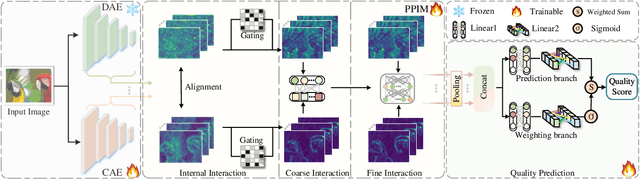
The content and distortion are widely recognized as the two primary factors affecting the visual quality of an image. While existing No-Reference Image Quality Assessment (NR-IQA) methods have modeled these factors, they fail to capture the complex interactions between content and distortions. This shortfall impairs their ability to accurately perceive quality. To confront this, we analyze the key properties required for interaction modeling and propose a robust NR-IQA approach termed CoDI-IQA (Content-Distortion high-order Interaction for NR-IQA), which aggregates local distortion and global content features within a hierarchical interaction framework. Specifically, a Progressive Perception Interaction Module (PPIM) is proposed to explicitly simulate how content and distortions independently and jointly influence image quality. By integrating internal interaction, coarse interaction, and fine interaction, it achieves high-order interaction modeling that allows the model to properly represent the underlying interaction patterns. To ensure sufficient interaction, multiple PPIMs are employed to hierarchically fuse multi-level content and distortion features at different granularities. We also tailor a training strategy suited for CoDI-IQA to maintain interaction stability. Extensive experiments demonstrate that the proposed method notably outperforms the state-of-the-art methods in terms of prediction accuracy, data efficiency, and generalization ability.
Enhancing Adversarial Training with Prior Knowledge Distillation for Robust Image Compression
Mar 16, 2024



Deep neural network-based image compression (NIC) has achieved excellent performance, but NIC method models have been shown to be susceptible to backdoor attacks. Adversarial training has been validated in image compression models as a common method to enhance model robustness. However, the improvement effect of adversarial training on model robustness is limited. In this paper, we propose a prior knowledge-guided adversarial training framework for image compression models. Specifically, first, we propose a gradient regularization constraint for training robust teacher models. Subsequently, we design a knowledge distillation based strategy to generate a priori knowledge from the teacher model to the student model for guiding adversarial training. Experimental results show that our method improves the reconstruction quality by about 9dB when the Kodak dataset is elected as the backdoor attack object for psnr attack. Compared with Ma2023, our method has a 5dB higher PSNR output at high bitrate points.
Learning Mutual Excitation for Hand-to-Hand and Human-to-Human Interaction Recognition
Feb 04, 2024



Recognizing interactive actions, including hand-to-hand interaction and human-to-human interaction, has attracted increasing attention for various applications in the field of video analysis and human-robot interaction. Considering the success of graph convolution in modeling topology-aware features from skeleton data, recent methods commonly operate graph convolution on separate entities and use late fusion for interactive action recognition, which can barely model the mutual semantic relationships between pairwise entities. To this end, we propose a mutual excitation graph convolutional network (me-GCN) by stacking mutual excitation graph convolution (me-GC) layers. Specifically, me-GC uses a mutual topology excitation module to firstly extract adjacency matrices from individual entities and then adaptively model the mutual constraints between them. Moreover, me-GC extends the above idea and further uses a mutual feature excitation module to extract and merge deep features from pairwise entities. Compared with graph convolution, our proposed me-GC gradually learns mutual information in each layer and each stage of graph convolution operations. Extensive experiments on a challenging hand-to-hand interaction dataset, i.e., the Assembely101 dataset, and two large-scale human-to-human interaction datasets, i.e., NTU60-Interaction and NTU120-Interaction consistently verify the superiority of our proposed method, which outperforms the state-of-the-art GCN-based and Transformer-based methods.
Explore Human Parsing Modality for Action Recognition
Jan 04, 2024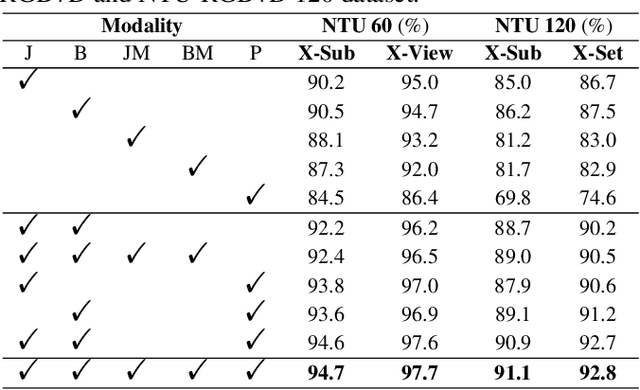
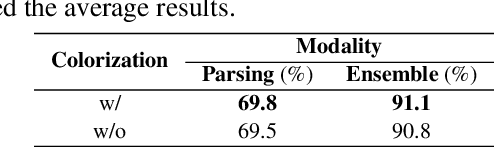
Multimodal-based action recognition methods have achieved high success using pose and RGB modality. However, skeletons sequences lack appearance depiction and RGB images suffer irrelevant noise due to modality limitations. To address this, we introduce human parsing feature map as a novel modality, since it can selectively retain effective semantic features of the body parts, while filtering out most irrelevant noise. We propose a new dual-branch framework called Ensemble Human Parsing and Pose Network (EPP-Net), which is the first to leverage both skeletons and human parsing modalities for action recognition. The first human pose branch feeds robust skeletons in graph convolutional network to model pose features, while the second human parsing branch also leverages depictive parsing feature maps to model parsing festures via convolutional backbones. The two high-level features will be effectively combined through a late fusion strategy for better action recognition. Extensive experiments on NTU RGB+D and NTU RGB+D 120 benchmarks consistently verify the effectiveness of our proposed EPP-Net, which outperforms the existing action recognition methods. Our code is available at: https://github.com/liujf69/EPP-Net-Action.
Dynamic Compositional Graph Convolutional Network for Efficient Composite Human Motion Prediction
Nov 23, 2023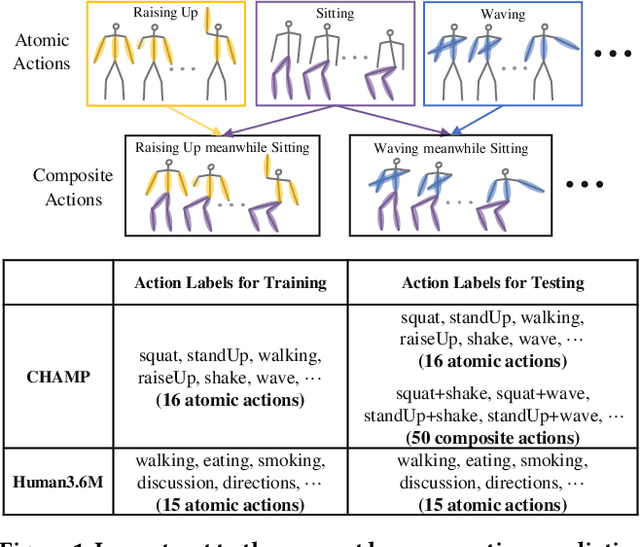
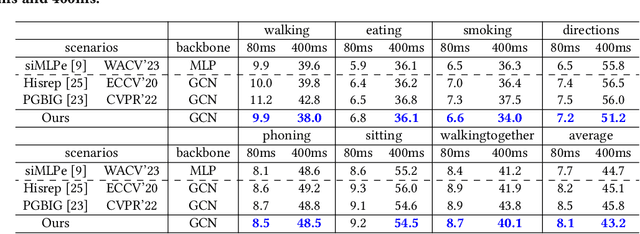
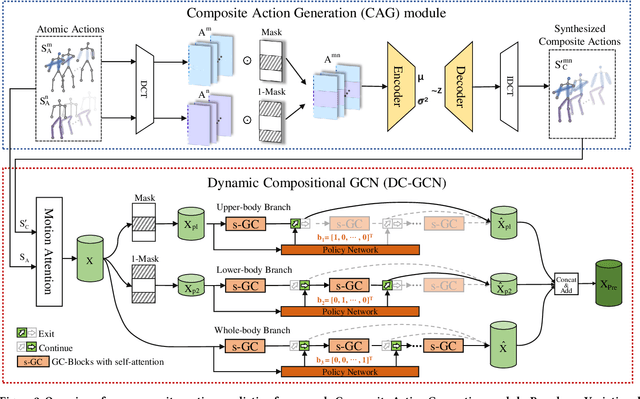
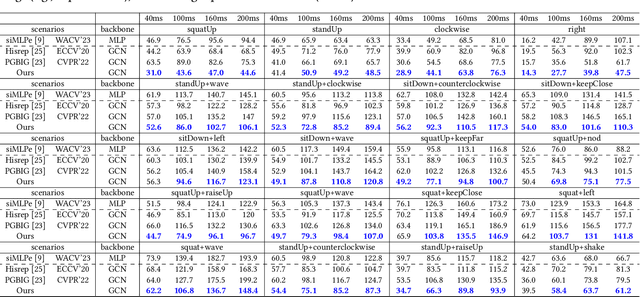
With potential applications in fields including intelligent surveillance and human-robot interaction, the human motion prediction task has become a hot research topic and also has achieved high success, especially using the recent Graph Convolutional Network (GCN). Current human motion prediction task usually focuses on predicting human motions for atomic actions. Observing that atomic actions can happen at the same time and thus formulating the composite actions, we propose the composite human motion prediction task. To handle this task, we first present a Composite Action Generation (CAG) module to generate synthetic composite actions for training, thus avoiding the laborious work of collecting composite action samples. Moreover, we alleviate the effect of composite actions on demand for a more complicated model by presenting a Dynamic Compositional Graph Convolutional Network (DC-GCN). Extensive experiments on the Human3.6M dataset and our newly collected CHAMP dataset consistently verify the efficiency of our DC-GCN method, which achieves state-of-the-art motion prediction accuracies and meanwhile needs few extra computational costs than traditional GCN-based human motion methods.
Integrating Human Parsing and Pose Network for Human Action Recognition
Jul 16, 2023



Human skeletons and RGB sequences are both widely-adopted input modalities for human action recognition. However, skeletons lack appearance features and color data suffer large amount of irrelevant depiction. To address this, we introduce human parsing feature map as a novel modality, since it can selectively retain spatiotemporal features of the body parts, while filtering out noises regarding outfits, backgrounds, etc. We propose an Integrating Human Parsing and Pose Network (IPP-Net) for action recognition, which is the first to leverage both skeletons and human parsing feature maps in dual-branch approach. The human pose branch feeds compact skeletal representations of different modalities in graph convolutional network to model pose features. In human parsing branch, multi-frame body-part parsing features are extracted with human detector and parser, which is later learnt using a convolutional backbone. A late ensemble of two branches is adopted to get final predictions, considering both robust keypoints and rich semantic body-part features. Extensive experiments on NTU RGB+D and NTU RGB+D 120 benchmarks consistently verify the effectiveness of the proposed IPP-Net, which outperforms the existing action recognition methods. Our code is publicly available at https://github.com/liujf69/IPP-Net-Parsing .
Universal Learned Image Compression With Low Computational Cost
Jun 23, 2022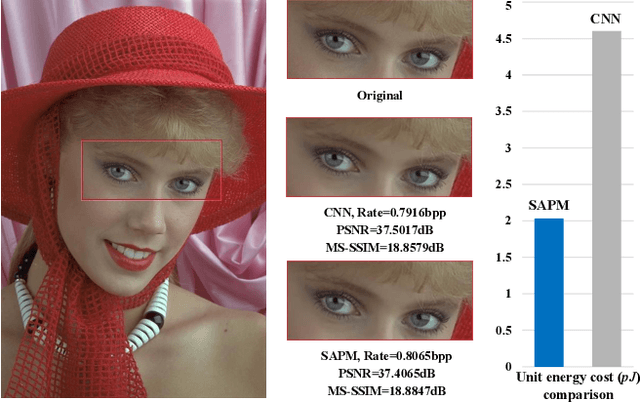

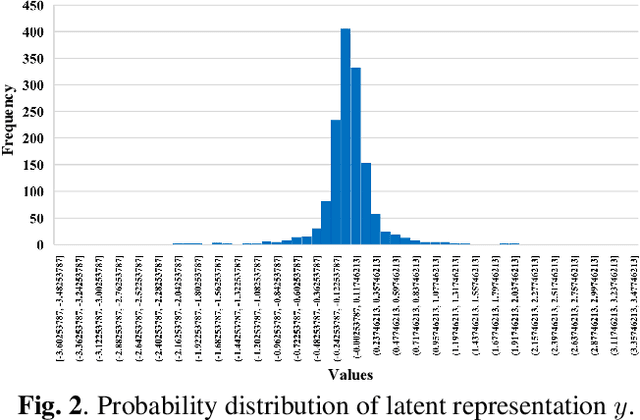

Recently, learned image compression methods have developed rapidly and exhibited excellent rate-distortion performance when compared to traditional standards, such as JPEG, JPEG2000 and BPG. However, the learning-based methods suffer from high computational costs, which is not beneficial for deployment on devices with limited resources. To this end, we propose shift-addition parallel modules (SAPMs), including SAPM-E for the encoder and SAPM-D for the decoder, to largely reduce the energy consumption. To be specific, they can be taken as plug-and-play components to upgrade existing CNN-based architectures, where the shift branch is used to extract large-grained features as compared to small-grained features learned by the addition branch. Furthermore, we thoroughly analyze the probability distribution of latent representations and propose to use Laplace Mixture Likelihoods for more accurate entropy estimation. Experimental results demonstrate that the proposed methods can achieve comparable or even better performance on both PSNR and MS-SSIM metrics to that of the convolutional counterpart with an about 2x energy reduction.
Context-aware Visual Tracking with Joint Meta-updating
Apr 04, 2022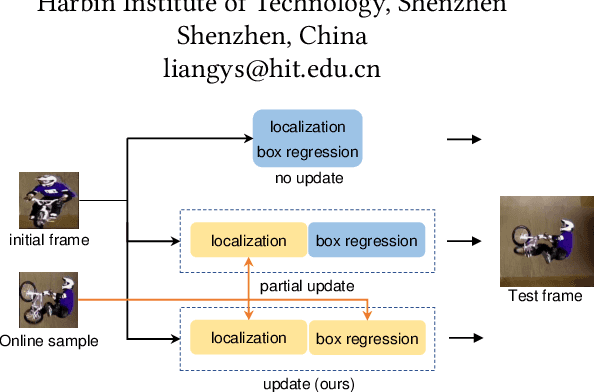
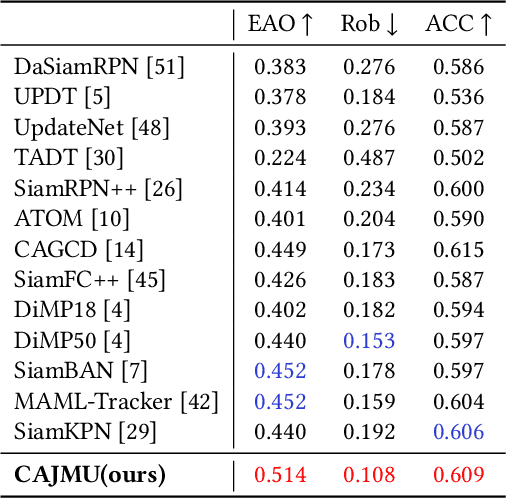


Visual object tracking acts as a pivotal component in various emerging video applications. Despite the numerous developments in visual tracking, existing deep trackers are still likely to fail when tracking against objects with dramatic variation. These deep trackers usually do not perform online update or update single sub-branch of the tracking model, for which they cannot adapt to the appearance variation of objects. Efficient updating methods are therefore crucial for tracking while previous meta-updater optimizes trackers directly over parameter space, which is prone to over-fit even collapse on longer sequences. To address these issues, we propose a context-aware tracking model to optimize the tracker over the representation space, which jointly meta-update both branches by exploiting information along the whole sequence, such that it can avoid the over-fitting problem. First, we note that the embedded features of the localization branch and the box-estimation branch, focusing on the local and global information of the target, are effective complements to each other. Based on this insight, we devise a context-aggregation module to fuse information in historical frames, followed by a context-aware module to learn affinity vectors for both branches of the tracker. Besides, we develop a dedicated meta-learning scheme, on account of fast and stable updating with limited training samples. The proposed tracking method achieves an EAO score of 0.514 on VOT2018 with the speed of 40FPS, demonstrating its capability of improving the accuracy and robustness of the underlying tracker with little speed drop.