 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Guided Reinforcement Learning for Multi-view Consistent 3D Scene Editing
Mar 03, 2026Leveraging the priors of 2D diffusion models for 3D editing has emerged as a promising paradigm. However, maintaining multi-view consistency in edited results remains challenging, and the extreme scarcity of 3D-consistent editing paired data renders supervised fine-tuning (SFT), the most effective training strategy for editing tasks, infeasible. In this paper, we observe that, while generating multi-view consistent 3D content is highly challenging, verifying 3D consistency is tractable, naturally positioning reinforcement learning (RL) as a feasible solution. Motivated by this, we propose \textbf{RL3DEdit}, a single-pass framework driven by RL optimization with novel rewards derived from the 3D foundation model, VGGT. Specifically, we leverage VGGT's robust priors learned from massive real-world data, feed the edited images, and utilize the output confidence maps and pose estimation errors as reward signals, effectively anchoring the 2D editing priors onto a 3D-consistent manifold via RL. Extensive experiments demonstrate that RL3DEdit achieves stable multi-view consistency and outperforms state-of-the-art methods in editing quality with high efficiency. To promote the development of 3D editing, we will release the code and model.
Mamba Meets Scheduling: Learning to Solve Flexible Job Shop Scheduling with Efficient Sequence Modeling
Feb 25, 2026The Flexible Job Shop Problem (FJSP) is a well-studied combinatorial optimization problem with extensive applications for manufacturing and production scheduling. It involves assigning jobs to various machines to optimize criteria, such as minimizing total completion time. Current learning-based methods in this domain often rely on localized feature extraction models, limiting their capacity to capture overarching dependencies spanning operations and machines. This paper introduces an innovative architecture that harnesses Mamba, a state-space model with linear computational complexity, to facilitate comprehensive sequence modeling tailored for FJSP. In contrast to prevalent graph-attention-based frameworks that are computationally intensive for FJSP, we show our model is more efficient. Specifically, the proposed model possesses an encoder and a decoder. The encoder incorporates a dual Mamba block to extract operation and machine features separately. Additionally, we introduce an efficient cross-attention decoder to learn interactive embeddings of operations and machines. Our experimental results demonstrate that our method achieves faster solving speed and surpasses the performance of state-of-the-art learning-based methods for FJSP across various benchmarks.
Generalizable Machine Learning Models for Predicting Data Center Server Power, Efficiency, and Throughput
Mar 09, 2025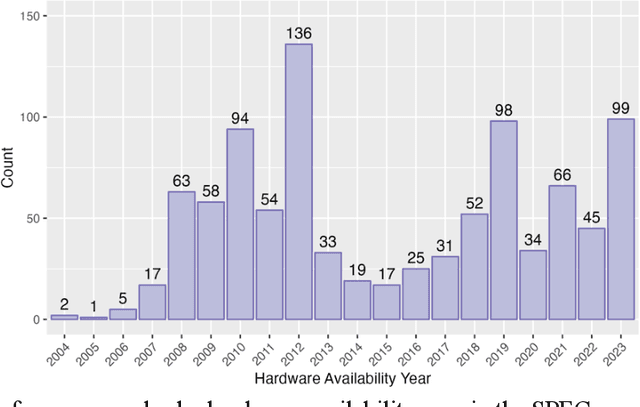
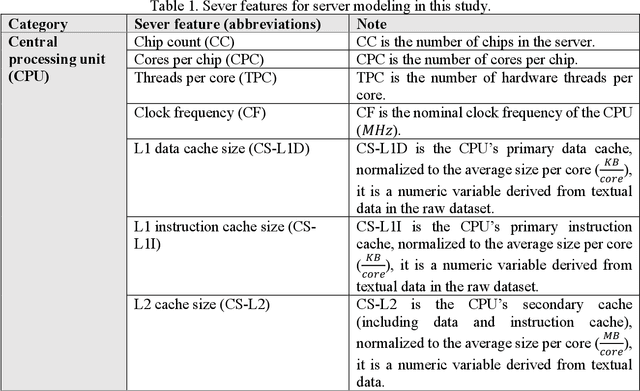
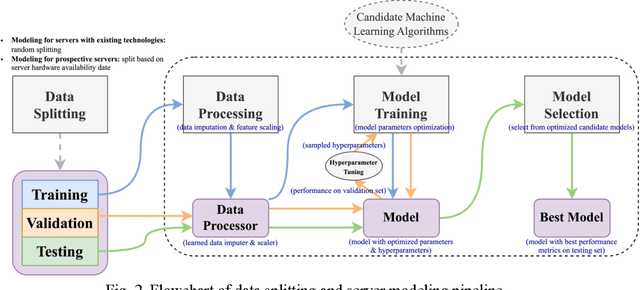

In the rapidly evolving digital era, comprehending the intricate dynamics influencing server power consumption, efficiency, and performance is crucial for sustainable data center operations. However, existing models lack the ability to provide a detailed and reliable understanding of these intricate relationships. This study employs a machine learning-based approach, using the SPECPower_ssj2008 database, to facilitate user-friendly and generalizable server modeling. The resulting models demonstrate high accuracy, with errors falling within approximately 10% on the testing dataset, showcasing their practical utility and generalizability. Through meticulous analysis, predictive features related to hardware availability date, server workload level, and specifications are identified, providing insights into optimizing energy conservation, efficiency, and performance in server deployment and operation. By systematically measuring biases and uncertainties, the study underscores the need for caution when employing historical data for prospective server modeling, considering the dynamic nature of technology landscapes. Collectively, this work offers valuable insights into the sustainable deployment and operation of servers in data centers, paving the way for enhanced resource use efficiency and more environmentally conscious practices.
Active Sampling for Node Attribute Completion on Graphs
Jan 14, 2025
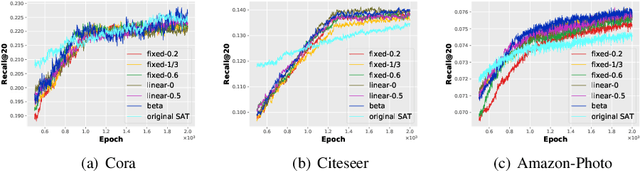


Node attribute, a type of crucial information for graph analysis, may be partially or completely missing for certain nodes in real world applications. Restoring the missing attributes is expected to benefit downstream graph learning. Few attempts have been made on node attribute completion, but a novel framework called Structure-attribute Transformer (SAT) was recently proposed by using a decoupled scheme to leverage structures and attributes. SAT ignores the differences in contributing to the learning schedule and finding a practical way to model the different importance of nodes with observed attributes is challenging. This paper proposes a novel AcTive Sampling algorithm (ATS) to restore missing node attributes. The representativeness and uncertainty of each node's information are first measured based on graph structure, representation similarity and learning bias. To select nodes as train samples in the next optimization step, a weighting scheme controlled by Beta distribution is then introduced to linearly combine the two properties. Extensive experiments on four public benchmark datasets and two downstream tasks have shown the superiority of ATS in node attribute completion.
Instructional Video Generation
Dec 05, 2024



Despite the recent strides in video generation, state-of-the-art methods still struggle with elements of visual detail. One particularly challenging case is the class of egocentric instructional videos in which the intricate motion of the hand coupled with a mostly stable and non-distracting environment is necessary to convey the appropriate visual action instruction. To address these challenges, we introduce a new method for instructional video generation. Our diffusion-based method incorporates two distinct innovations. First, we propose an automatic method to generate the expected region of motion, guided by both the visual context and the action text. Second, we introduce a critical hand structure loss to guide the diffusion model to focus on smooth and consistent hand poses. We evaluate our method on augmented instructional datasets based on EpicKitchens and Ego4D, demonstrating significant improvements over state-of-the-art methods in terms of instructional clarity, especially of the hand motion in the target region, across diverse environments and actions.Video results can be found on the project webpage: https://excitedbutter.github.io/Instructional-Video-Generation/
Enhancing Adversarial Training with Prior Knowledge Distillation for Robust Image Compression
Mar 16, 2024



Deep neural network-based image compression (NIC) has achieved excellent performance, but NIC method models have been shown to be susceptible to backdoor attacks. Adversarial training has been validated in image compression models as a common method to enhance model robustness. However, the improvement effect of adversarial training on model robustness is limited. In this paper, we propose a prior knowledge-guided adversarial training framework for image compression models. Specifically, first, we propose a gradient regularization constraint for training robust teacher models. Subsequently, we design a knowledge distillation based strategy to generate a priori knowledge from the teacher model to the student model for guiding adversarial training. Experimental results show that our method improves the reconstruction quality by about 9dB when the Kodak dataset is elected as the backdoor attack object for psnr attack. Compared with Ma2023, our method has a 5dB higher PSNR output at high bitrate points.
3DRIMR: 3D Reconstruction and Imaging via mmWave Radar based on Deep Learning
Aug 05, 2021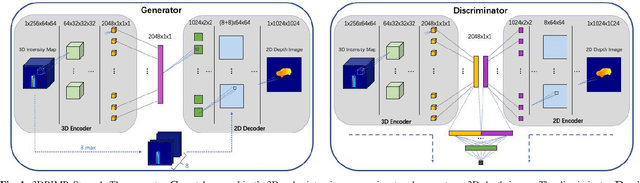
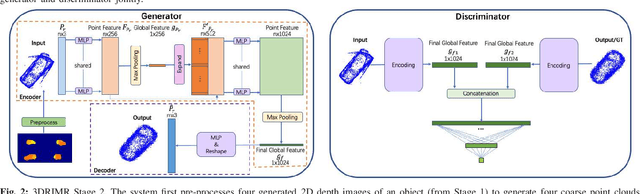
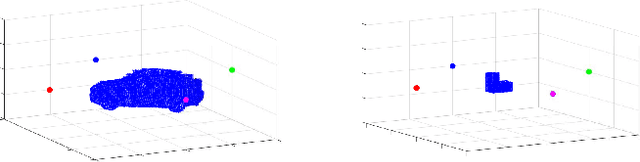
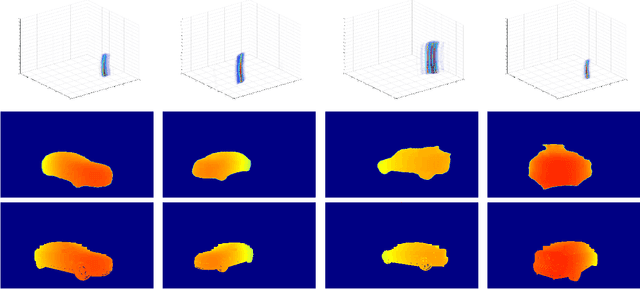
mmWave radar has been shown as an effective sensing technique in low visibility, smoke, dusty, and dense fog environment. However tapping the potential of radar sensing to reconstruct 3D object shapes remains a great challenge, due to the characteristics of radar data such as sparsity, low resolution, specularity, high noise, and multi-path induced shadow reflections and artifacts. In this paper we propose 3D Reconstruction and Imaging via mmWave Radar (3DRIMR), a deep learning based architecture that reconstructs 3D shape of an object in dense detailed point cloud format, based on sparse raw mmWave radar intensity data. The architecture consists of two back-to-back conditional GAN deep neural networks: the first generator network generates 2D depth images based on raw radar intensity data, and the second generator network outputs 3D point clouds based on the results of the first generator. The architecture exploits both convolutional neural network's convolutional operation (that extracts local structure neighborhood information) and the efficiency and detailed geometry capture capability of point clouds (other than costly voxelization of 3D space or distance fields). Our experiments have demonstrated 3DRIMR's effectiveness in reconstructing 3D objects, and its performance improvement over standard techniques.
A Deep Reinforcement Learning Approach to Multi-component Job Scheduling in Edge Computing
Sep 01, 2019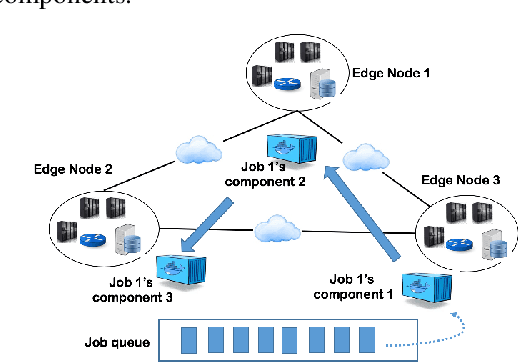
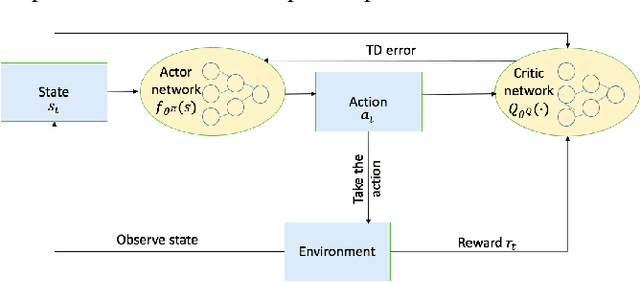
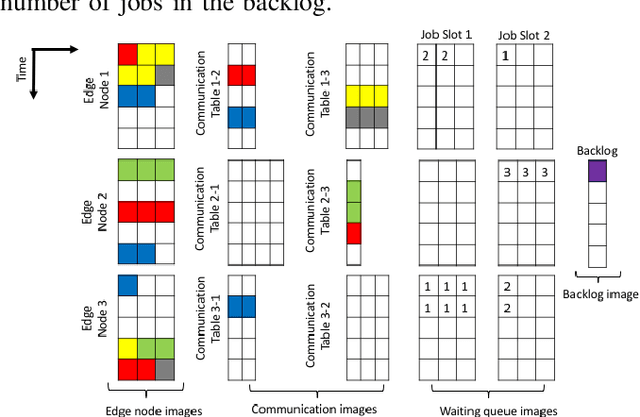
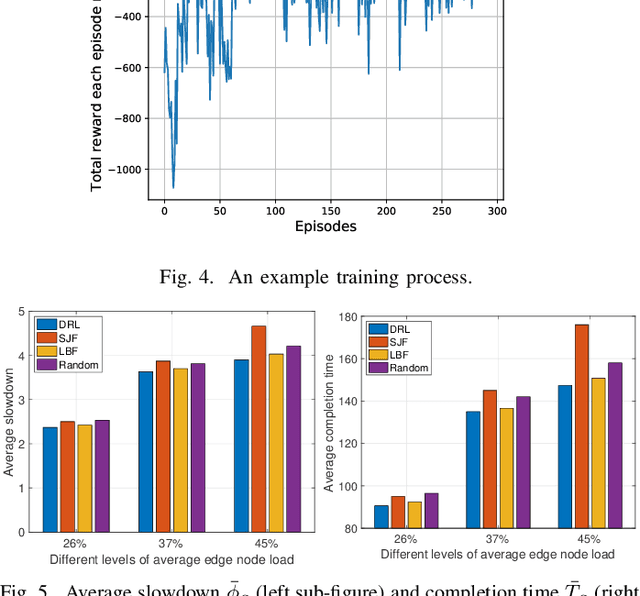
We are interested in the optimal scheduling of a collection of multi-component application jobs in an edge computing system that consists of geo-distributed edge computing nodes connected through a wide area network. The scheduling and placement of application jobs in an edge system is challenging due to the interdependence of multiple components of each job, and the communication delays between the geographically distributed data sources and edge nodes and their dynamic availability. In this paper we explore the feasibility of applying Deep Reinforcement Learning (DRL) based design to address these challenges. We introduce a DRL actor-critic algorithm that aims to find an optimal scheduling policy to minimize average job slowdown in the edge system. We have demonstrated through simulations that our design outperforms a few existing algorithms, based on both synthetic data and a Google cloud data trace.