 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Reconstruction of Multiple Objects by mmWave Radar on UAV
Nov 03, 2022



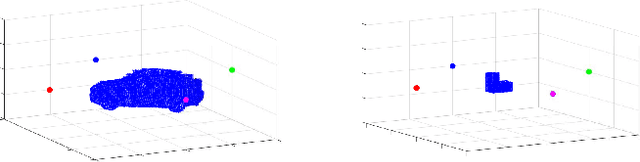
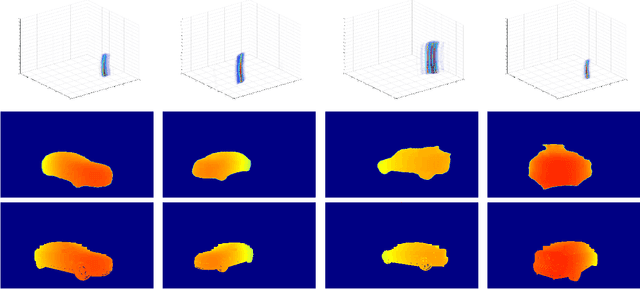
In this paper, we explore the feasibility of utilizing a mmWave radar sensor installed on a UAV to reconstruct the 3D shapes of multiple objects in a space. The UAV hovers at various locations in the space, and its onboard radar senor collects raw radar data via scanning the space with Synthetic Aperture Radar (SAR) operation. The radar data is sent to a deep neural network model, which outputs the point cloud reconstruction of the multiple objects in the space. We evaluate two different models. Model 1 is our recently proposed 3DRIMR/R2P model, and Model 2 is formed by adding a segmentation stage in the processing pipeline of Model 1. Our experiments have demonstrated that both models are promising in solving the multiple object reconstruction problem. We also show that Model 2, despite producing denser and smoother point clouds, can lead to higher reconstruction loss or even loss of objects. In addition, we find that both models are robust to the highly noisy radar data obtained by unstable SAR operation due to the instability or vibration of a small UAV hovering at its intended scanning point. Our exploratory study has shown a promising direction of applying mmWave radar sensing in 3D object reconstruction.
R2P: A Deep Learning Model from mmWave Radar to Point Cloud
Jul 21, 2022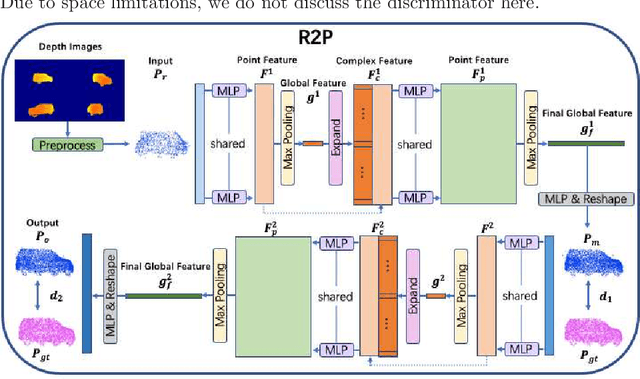
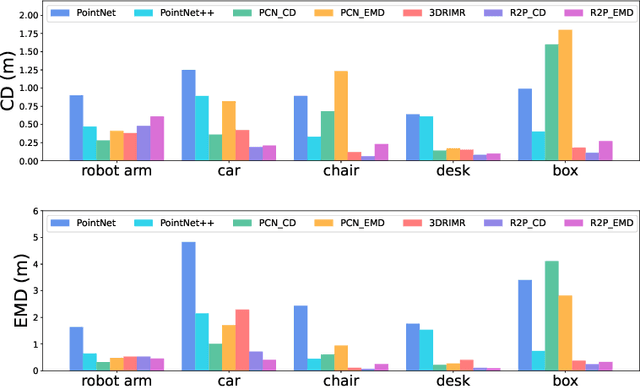
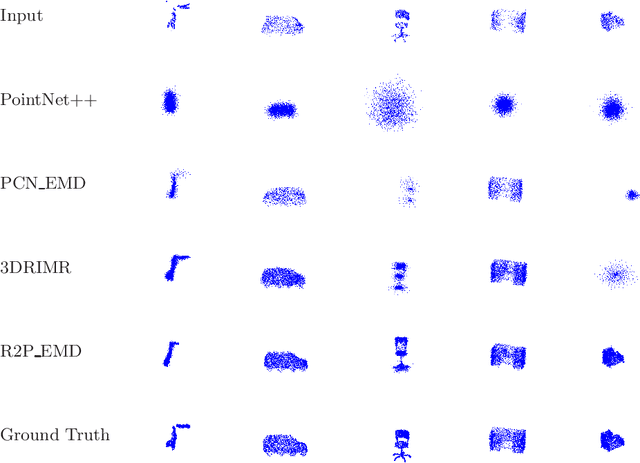
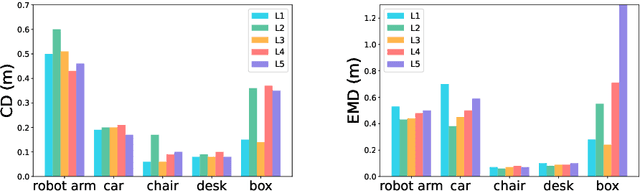
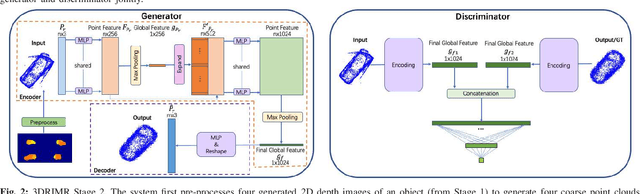
Recent research has shown the effectiveness of mmWave radar sensing for object detection in low visibility environments, which makes it an ideal technique in autonomous navigation systems. In this paper, we introduce Radar to Point Cloud (R2P), a deep learning model that generates smooth, dense, and highly accurate point cloud representation of a 3D object with fine geometry details, based on rough and sparse point clouds with incorrect points obtained from mmWave radar. These input point clouds are converted from the 2D depth images that are generated from raw mmWave radar sensor data, characterized by inconsistency, and orientation and shape errors. R2P utilizes an architecture of two sequential deep learning encoder-decoder blocks to extract the essential features of those radar-based input point clouds of an object when observed from multiple viewpoints, and to ensure the internal consistency of a generated output point cloud and its accurate and detailed shape reconstruction of the original object. We implement R2P to replace Stage 2 of our recently proposed 3DRIMR (3D Reconstruction and Imaging via mmWave Radar) system. Our experiments demonstrate the significant performance improvement of R2P over the popular existing methods such as PointNet, PCN, and the original 3DRIMR design.
DeepPoint: A Deep Learning Model for 3D Reconstruction in Point Clouds via mmWave Radar
Sep 19, 2021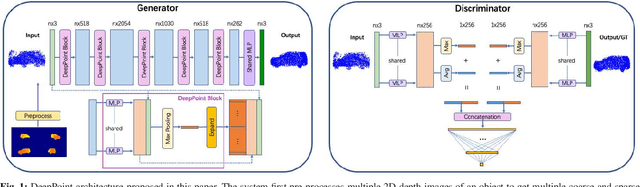
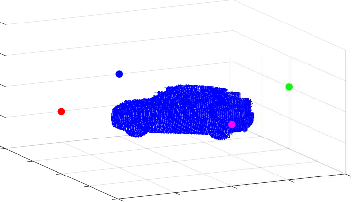
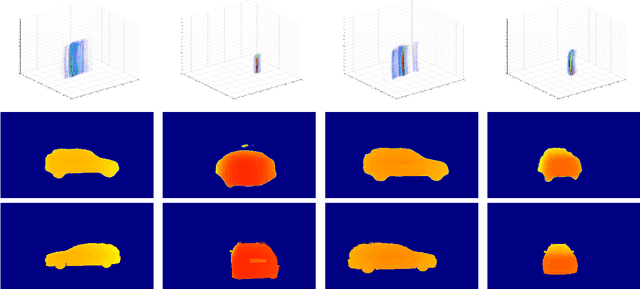
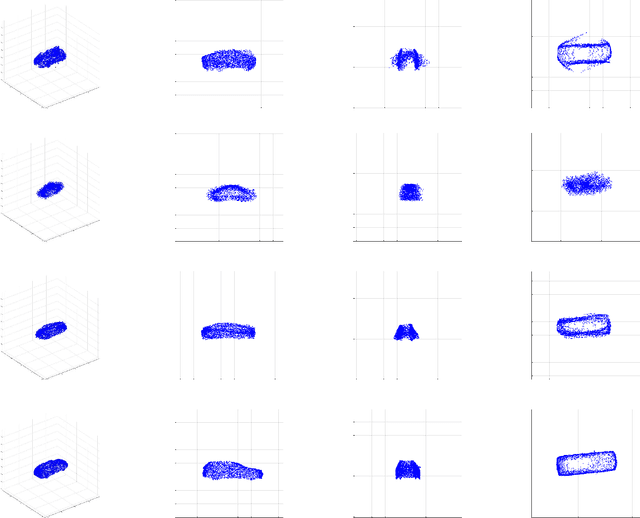
Recent research has shown that mmWave radar sensing is effective for object detection in low visibility environments, which makes it an ideal technique in autonomous navigation systems such as autonomous vehicles. However, due to the characteristics of radar signals such as sparsity, low resolution, specularity, and high noise, it is still quite challenging to reconstruct 3D object shapes via mmWave radar sensing. Built on our recent proposed 3DRIMR (3D Reconstruction and Imaging via mmWave Radar), we introduce in this paper DeepPoint, a deep learning model that generates 3D objects in point cloud format that significantly outperforms the original 3DRIMR design. The model adopts a conditional Generative Adversarial Network (GAN) based deep neural network architecture. It takes as input the 2D depth images of an object generated by 3DRIMR's Stage 1, and outputs smooth and dense 3D point clouds of the object. The model consists of a novel generator network that utilizes a sequence of DeepPoint blocks or layers to extract essential features of the union of multiple rough and sparse input point clouds of an object when observed from various viewpoints, given that those input point clouds may contain many incorrect points due to the imperfect generation process of 3DRIMR's Stage 1. The design of DeepPoint adopts a deep structure to capture the global features of input point clouds, and it relies on an optimally chosen number of DeepPoint blocks and skip connections to achieve performance improvement over the original 3DRIMR design. Our experiments have demonstrated that this model significantly outperforms the original 3DRIMR and other standard techniques in reconstructing 3D objects.
3DRIMR: 3D Reconstruction and Imaging via mmWave Radar based on Deep Learning
Aug 05, 2021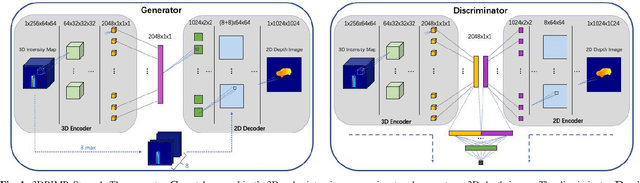
mmWave radar has been shown as an effective sensing technique in low visibility, smoke, dusty, and dense fog environment. However tapping the potential of radar sensing to reconstruct 3D object shapes remains a great challenge, due to the characteristics of radar data such as sparsity, low resolution, specularity, high noise, and multi-path induced shadow reflections and artifacts. In this paper we propose 3D Reconstruction and Imaging via mmWave Radar (3DRIMR), a deep learning based architecture that reconstructs 3D shape of an object in dense detailed point cloud format, based on sparse raw mmWave radar intensity data. The architecture consists of two back-to-back conditional GAN deep neural networks: the first generator network generates 2D depth images based on raw radar intensity data, and the second generator network outputs 3D point clouds based on the results of the first generator. The architecture exploits both convolutional neural network's convolutional operation (that extracts local structure neighborhood information) and the efficiency and detailed geometry capture capability of point clouds (other than costly voxelization of 3D space or distance fields). Our experiments have demonstrated 3DRIMR's effectiveness in reconstructing 3D objects, and its performance improvement over standard techniques.
LIDAUS: Localization of IoT Device via Anchor UAV SLAM
Aug 05, 2021
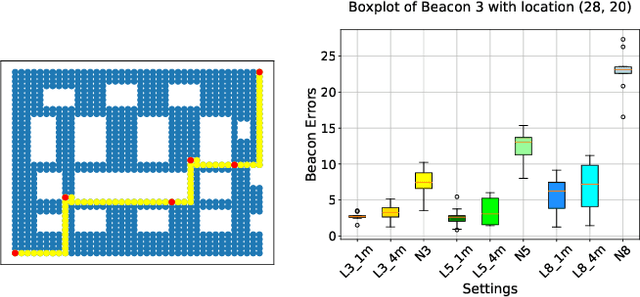
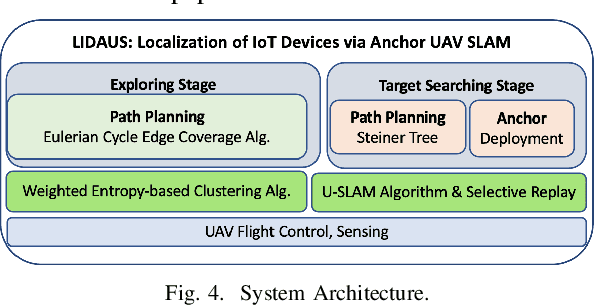
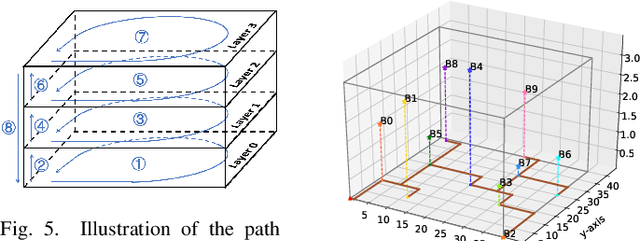
We introduce LIDAUS Localization of IoT Device via Anchor UAV SLAM), an infrastructure-free, multi-stage SLAM system that utilizes an Unmanned Aerial Vehicle (UAV) to accurately localize IoT devices in a 3D indoor space where GPS signals are unavailable or weak, e.g., manufacturing factories, disaster sites, or smart buildings. The lack of GPS signals and infrastructure support makes most of the existing indoor localization systems not practical when localizing a large number of wireless IoT devices. In addition, safety concerns, access restriction, and simply the huge amount of IoT devices make it not practical for humans to manually localize and track IoT devices. To address these challenges, the UAV in our LIDAUS system conducts multi-stage 3D SLAM trips to localize devices based only on RSSIs, the most widely available measurement of the signals of almost all commodity IoT devices. The main novelties of the system include a weighted entropy-based clustering algorithm to select high quality RSSI observation locations, a 3D U-SLAM algorithm that is enhanced by deploying anchor beacons along the UAV's path, and the path planning based on Eulerian cycles on multi-layer grid graphs that model the space in exploring stage and Steiner tree paths in searching stages. Our simulations and experiments of Bluetooth IoT devices have demonstrated that the system can achieve high localization accuracy based only on RSSIs of commodity IoT devices.