 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Large Multimodal Models Understand Arbitrary Visual Prompts
Dec 01, 2023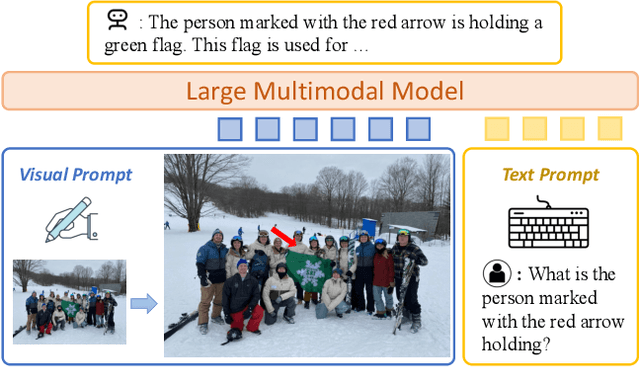
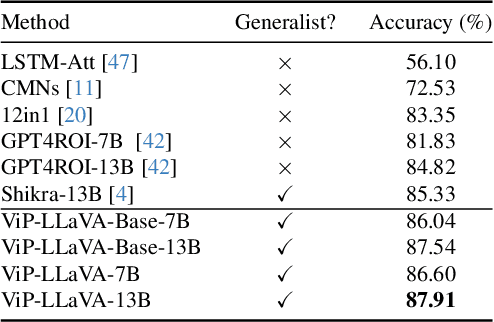
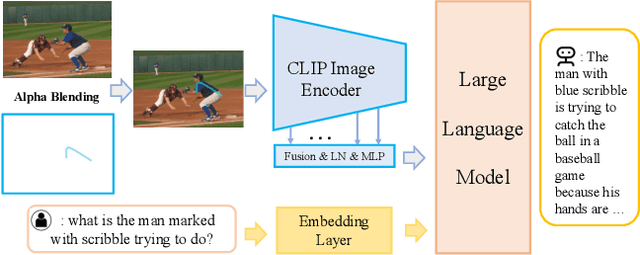

While existing large vision-language multimodal models focus on whole image understanding, there is a prominent gap in achieving region-specific comprehension. Current approaches that use textual coordinates or spatial encodings often fail to provide a user-friendly interface for visual prompting. To address this challenge, we introduce a novel multimodal model capable of decoding arbitrary visual prompts. This allows users to intuitively mark images and interact with the model using natural cues like a "red bounding box" or "pointed arrow". Our simple design directly overlays visual markers onto the RGB image, eliminating the need for complex region encodings, yet achieves state-of-the-art performance on region-understanding tasks like Visual7W, PointQA, and Visual Commonsense Reasoning benchmark. Furthermore, we present ViP-Bench, a comprehensive benchmark to assess the capability of models in understanding visual prompts across multiple dimensions, enabling future research in this domain. Code, data, and model are publicly available.
SHIFT3D: Synthesizing Hard Inputs For Tricking 3D Detectors
Sep 11, 2023



We present SHIFT3D, a differentiable pipeline for generating 3D shapes that are structurally plausible yet challenging to 3D object detectors. In safety-critical applications like autonomous driving, discovering such novel challenging objects can offer insight into unknown vulnerabilities of 3D detectors. By representing objects with a signed distanced function (SDF), we show that gradient error signals allow us to smoothly deform the shape or pose of a 3D object in order to confuse a downstream 3D detector. Importantly, the objects generated by SHIFT3D physically differ from the baseline object yet retain a semantically recognizable shape. Our approach provides interpretable failure modes for modern 3D object detectors, and can aid in preemptive discovery of potential safety risks within 3D perception systems before these risks become critical failures.
Scene Synthesis from Human Motion
Jan 04, 2023Large-scale capture of human motion with diverse, complex scenes, while immensely useful, is often considered prohibitively costly. Meanwhile, human motion alone contains rich information about the scene they reside in and interact with. For example, a sitting human suggests the existence of a chair, and their leg position further implies the chair's pose. In this paper, we propose to synthesize diverse, semantically reasonable, and physically plausible scenes based on human motion. Our framework, Scene Synthesis from HUMan MotiON (SUMMON), includes two steps. It first uses ContactFormer, our newly introduced contact predictor, to obtain temporally consistent contact labels from human motion. Based on these predictions, SUMMON then chooses interacting objects and optimizes physical plausibility losses; it further populates the scene with objects that do not interact with humans. Experimental results demonstrate that SUMMON synthesizes feasible, plausible, and diverse scenes and has the potential to generate extensive human-scene interaction data for the community.
Depth Is All You Need for Monocular 3D Detection
Oct 05, 2022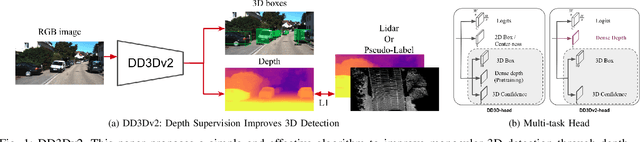
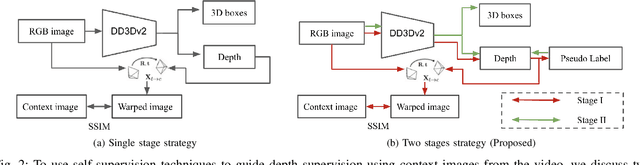

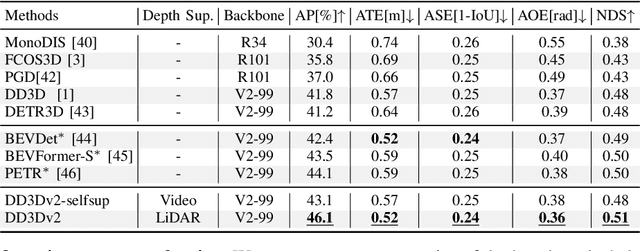
A key contributor to recent progress in 3D detection from single images is monocular depth estimation. Existing methods focus on how to leverage depth explicitly, by generating pseudo-pointclouds or providing attention cues for image features. More recent works leverage depth prediction as a pretraining task and fine-tune the depth representation while training it for 3D detection. However, the adaptation is insufficient and is limited in scale by manual labels. In this work, we propose to further align depth representation with the target domain in unsupervised fashions. Our methods leverage commonly available LiDAR or RGB videos during training time to fine-tune the depth representation, which leads to improved 3D detectors. Especially when using RGB videos, we show that our two-stage training by first generating pseudo-depth labels is critical because of the inconsistency in loss distribution between the two tasks. With either type of reference data, our multi-task learning approach improves over the state of the art on both KITTI and NuScenes, while matching the test-time complexity of its single task sub-network.
Shadows Shed Light on 3D Objects
Jun 17, 2022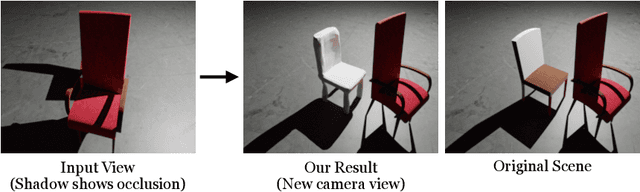
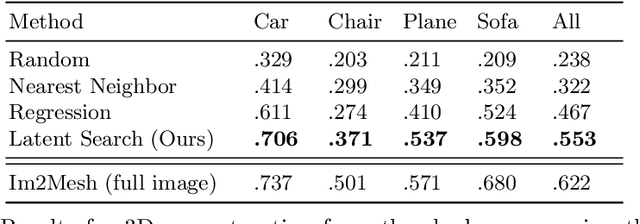
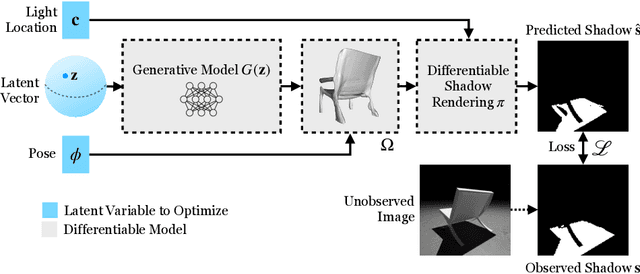
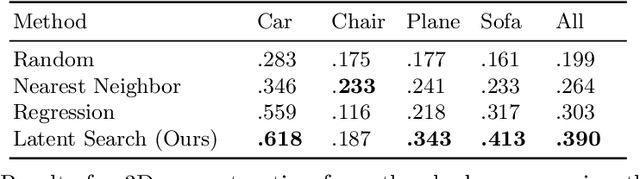
3D reconstruction is a fundamental problem in computer vision, and the task is especially challenging when the object to reconstruct is partially or fully occluded. We introduce a method that uses the shadows cast by an unobserved object in order to infer the possible 3D volumes behind the occlusion. We create a differentiable image formation model that allows us to jointly infer the 3D shape of an object, its pose, and the position of a light source. Since the approach is end-to-end differentiable, we are able to integrate learned priors of object geometry in order to generate realistic 3D shapes of different object categories. Experiments and visualizations show that the method is able to generate multiple possible solutions that are consistent with the observation of the shadow. Our approach works even when the position of the light source and object pose are both unknown. Our approach is also robust to real-world images where ground-truth shadow mask is unknown.
Revealing Occlusions with 4D Neural Fields
Apr 22, 2022

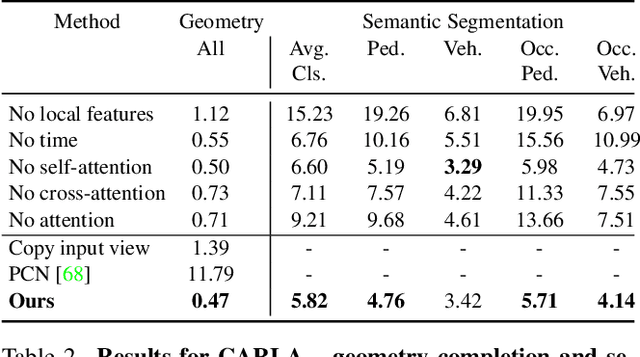
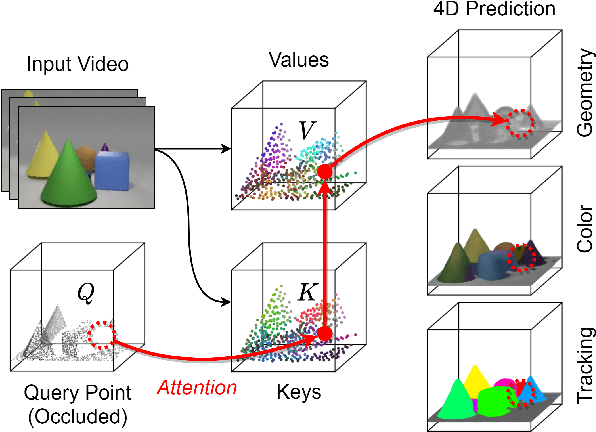
For computer vision systems to operate in dynamic situations, they need to be able to represent and reason about object permanence. We introduce a framework for learning to estimate 4D visual representations from monocular RGB-D, which is able to persist objects, even once they become obstructed by occlusions. Unlike traditional video representations, we encode point clouds into a continuous representation, which permits the model to attend across the spatiotemporal context to resolve occlusions. On two large video datasets that we release along with this paper, our experiments show that the representation is able to successfully reveal occlusions for several tasks, without any architectural changes. Visualizations show that the attention mechanism automatically learns to follow occluded objects. Since our approach can be trained end-to-end and is easily adaptable, we believe it will be useful for handling occlusions in many video understanding tasks. Data, code, and models are available at https://occlusions.cs.columbia.edu/.
Warp-Refine Propagation: Semi-Supervised Auto-labeling via Cycle-consistency
Sep 28, 2021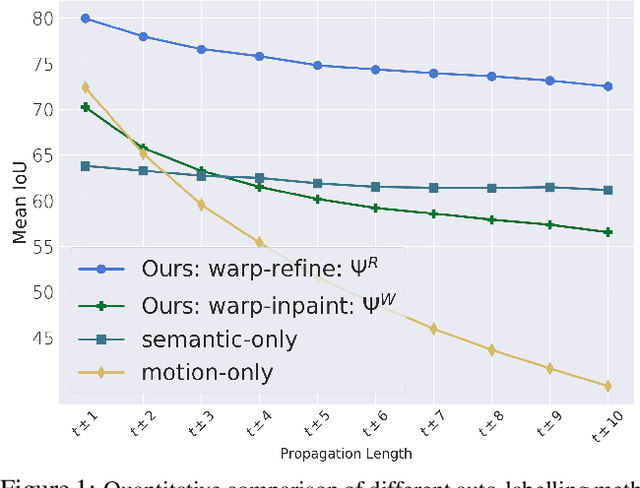
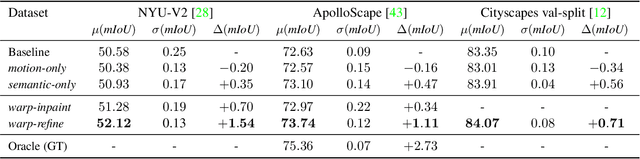
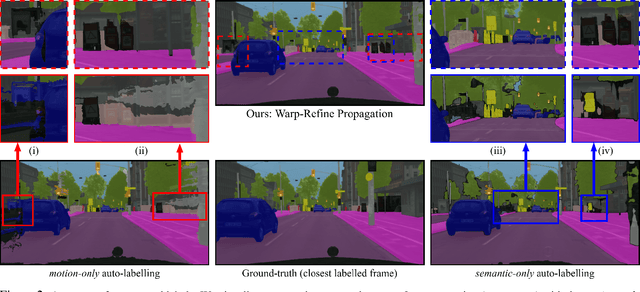

Deep learning models for semantic segmentation rely on expensive, large-scale, manually annotated datasets. Labelling is a tedious process that can take hours per image. Automatically annotating video sequences by propagating sparsely labeled frames through time is a more scalable alternative. In this work, we propose a novel label propagation method, termed Warp-Refine Propagation, that combines semantic cues with geometric cues to efficiently auto-label videos. Our method learns to refine geometrically-warped labels and infuse them with learned semantic priors in a semi-supervised setting by leveraging cycle consistency across time. We quantitatively show that our method improves label-propagation by a noteworthy margin of 13.1 mIoU on the ApolloScape dataset. Furthermore, by training with the auto-labelled frames, we achieve competitive results on three semantic-segmentation benchmarks, improving the state-of-the-art by a large margin of 1.8 and 3.61 mIoU on NYU-V2 and KITTI, while matching the current best results on Cityscapes.
Is Pseudo-Lidar needed for Monocular 3D Object detection?
Aug 13, 2021

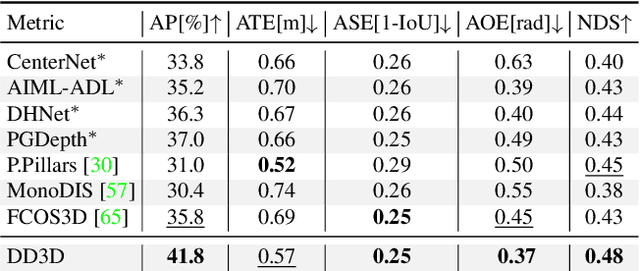
Recent progress in 3D object detection from single images leverages monocular depth estimation as a way to produce 3D pointclouds, turning cameras into pseudo-lidar sensors. These two-stage detectors improve with the accuracy of the intermediate depth estimation network, which can itself be improved without manual labels via large-scale self-supervised learning. However, they tend to suffer from overfitting more than end-to-end methods, are more complex, and the gap with similar lidar-based detectors remains significant. In this work, we propose an end-to-end, single stage, monocular 3D object detector, DD3D, that can benefit from depth pre-training like pseudo-lidar methods, but without their limitations. Our architecture is designed for effective information transfer between depth estimation and 3D detection, allowing us to scale with the amount of unlabeled pre-training data. Our method achieves state-of-the-art results on two challenging benchmarks, with 16.34% and 9.28% AP for Cars and Pedestrians (respectively) on the KITTI-3D benchmark, and 41.5% mAP on NuScenes.