 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Data Flywheel for Embodied Intelligence in Logistics
Jun 04, 2026Embodied intelligence is moving from laboratory demonstrations toward industrial deployment, with the logistics industry serving as a key application scenario. Learning-based policies offer a promising path beyond traditional perception-planning-control pipelines, but their scalability depends on how embodied data can be collected, organized, and reused. This research studies a data-centric framework for industrial embodied intelligence by constructing a logistics data flywheel. Our framework converts daily operations into reusable data assets, uses World Models to generate reliable supervision for long-tail parcel manipulation, and feeds deployment feedback back into policy improvement. As an initial result, \textit{WM-DAgger} introduces a World-Model-based data aggregation framework that synthesizes out-of-distribution recovery data for robust imitation learning. Building on this result, ongoing work explores how large-scale in-the-wild multimodal data, including labeled human demonstrations, unlabeled operational videos, and system-level robot logs, can be aligned for policy learning and transformed into feedback for continual system improvement.
AccLock: Unlocking Identity with Heartbeat Using In-Ear Accelerometers
May 12, 2026The widespread use of earphones has enabled various sensing applications, including activity recognition, health monitoring, and context-aware computing. Among these, earphone-based user authentication has become a key technique by leveraging unique biometric features. However, existing earphone-based authentication systems face key limitations: they either require explicit user interaction or active speaker output, or suffer from poor accessibility and vulnerability to environmental noise, which hinders large-scale deployment. In this paper, we propose a passive authentication system, called AccLock, which leverages distinctive features extracted from in-ear BCG signals to enable secure and unobtrusive user verification. Our system offers several advantages over previous systems, including zero-involvement for both the device and the user, ubiquitous, and resilient to environmental noise. To realize this, we first design a two-stage denoising scheme to suppress both inherent and sporadic interference. To extract user-specific features, we then propose a disentanglement-based deep learning model, HIDNet, which explicitly separates user-specific features from shared nuisance components. Lastly, we develop a scalable authentication framework based on a Siamese network that eliminates the need for per-user classifier training. We conduct extensive experiments with 33 participants, achieving an average FAR of 3.13% and FRR of 2.99%, which demonstrates the practical feasibility of AccLock.
WM-DAgger: Enabling Efficient Data Aggregation for Imitation Learning with World Models
Apr 13, 2026Imitation learning is a powerful paradigm for training robotic policies, yet its performance is limited by compounding errors: minor policy inaccuracies could drive robots into unseen out-of-distribution (OOD) states in the training set, where the policy could generate even bigger errors, leading to eventual failures. While the Data Aggregation (DAgger) framework tries to address this issue, its reliance on continuous human involvement severely limits scalability. In this paper, we propose WM-DAgger, an efficient data aggregation framework that leverages World Models to synthesize OOD recovery data without requiring human involvement. Specifically, we focus on manipulation tasks with an eye-in-hand robotic arm and only few-shot demonstrations. To avoid synthesizing misleading data and overcome the hallucination issues inherent to World Models, our framework introduces two key mechanisms: (1) a Corrective Action Synthesis Module that generates task-oriented recovery actions to prevent misleading supervision, and (2) a Consistency-Guided Filtering Module that discards physically implausible trajectories by anchoring terminal synthesized frames to corresponding real frames in expert demonstrations. We extensively validate WM-DAgger on multiple real-world robotic tasks. Results that our method significantly improves success rates, achieving a 93.3\% success rate in soft bag pushing with only five demonstrations. The source code is publicly available at https://github.com/czs12354-xxdbd/WM-Dagger.
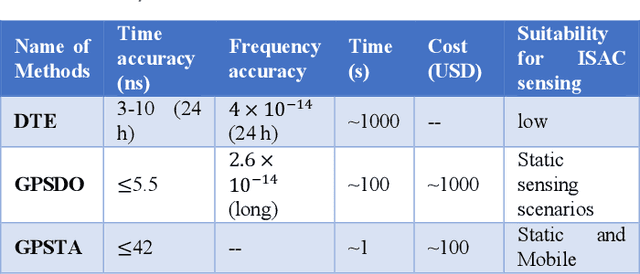
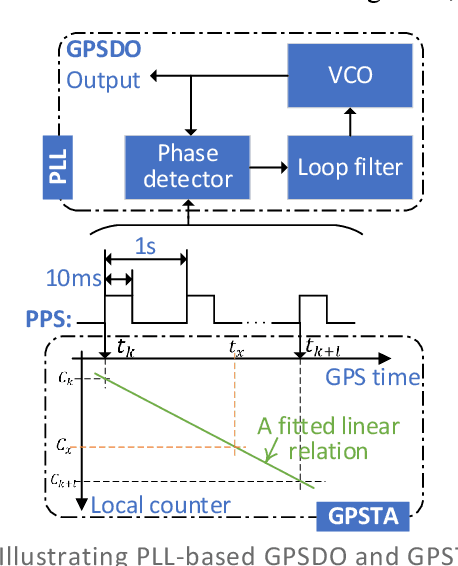
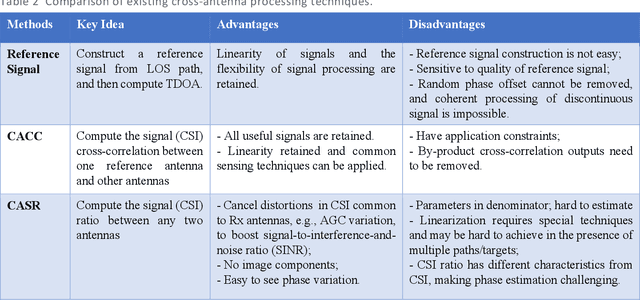
Sensing in Bi-Static ISAC Systems with Clock Asynchronism: A Signal Processing Perspective
Feb 14, 2024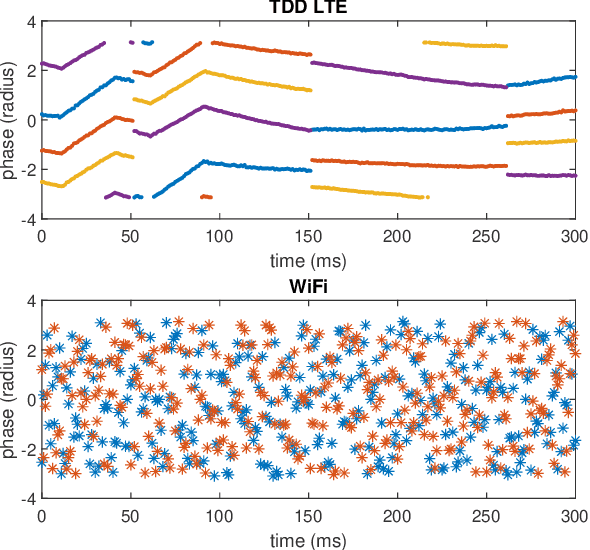
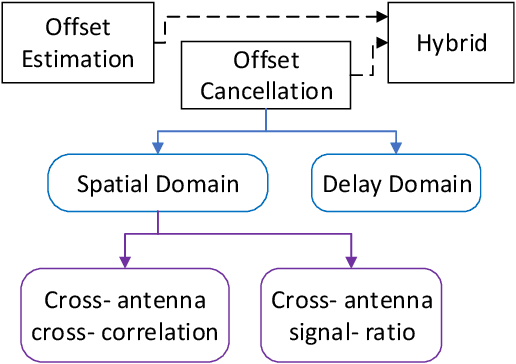
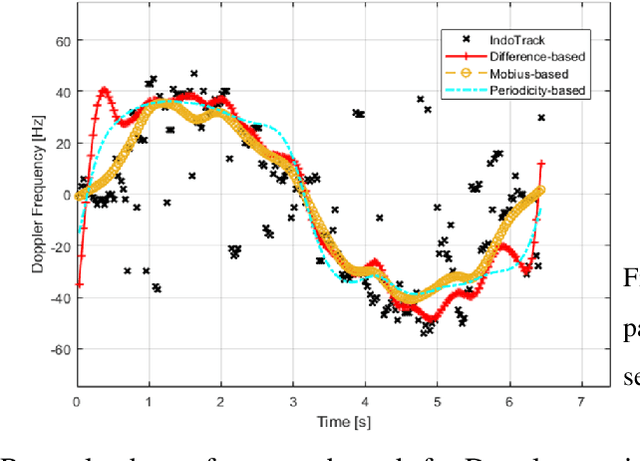
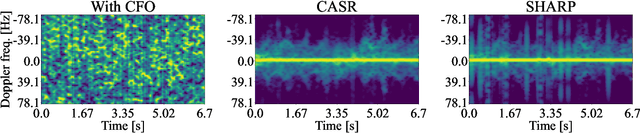
Integrated Sensing and Communications (ISAC) has been identified as a pillar usage scenario for the impending 6G era. Bi-static sensing, a major type of sensing in \ac{isac}, is promising to expedite ISAC in the near future, as it requires minimal changes to the existing network infrastructure. However, a critical challenge for bi-static sensing is clock asynchronism due to the use of different clocks at far separated transmitter and receiver. This causes the received signal to be affected by time-varying random phase offsets, severely degrading, or even failing, direct sensing. Considerable research attention has been directed toward addressing the clock asynchronism issue in bi-static sensing. In this white paper, we endeavor to fill the gap by providing an overview of the issue and existing techniques developed in an ISAC background. Based on the review and comparison, we also draw insights into the future research directions and open problems, aiming to nurture the maturation of bi-static sensing in ISAC.
Natural Language based Context Modeling and Reasoning with LLMs: A Tutorial
Sep 24, 2023Large language models (LLMs) have become phenomenally surging, since 2018--two decades after introducing context-awareness into computing systems. Through taking into account the situations of ubiquitous devices, users and the societies, context-aware computing has enabled a wide spectrum of innovative applications, such as assisted living, location-based social network services and so on. To recognize contexts and make decisions for actions accordingly, various artificial intelligence technologies, such as Ontology and OWL, have been adopted as representations for context modeling and reasoning. Recently, with the rise of LLMs and their improved natural language understanding and reasoning capabilities, it has become feasible to model contexts using natural language and perform context reasoning by interacting with LLMs such as ChatGPT and GPT-4. In this tutorial, we demonstrate the use of texts, prompts, and autonomous agents (AutoAgents) that enable LLMs to perform context modeling and reasoning without requiring fine-tuning of the model. We organize and introduce works in the related field, and name this computing paradigm as the LLM-driven Context-aware Computing (LCaC). In the LCaC paradigm, users' requests, sensors reading data, and the command to actuators are supposed to be represented as texts. Given the text of users' request and sensor data, the AutoAgent models the context by prompting and sends to the LLM for context reasoning. LLM generates a plan of actions and responds to the AutoAgent, which later follows the action plan to foster context-awareness. To prove the concepts, we use two showcases--(1) operating a mobile z-arm in an apartment for assisted living, and (2) planning a trip and scheduling the itinerary in a context-aware and personalized manner.
Integration of Radar Sensing into Communications with Asynchronous Transceivers
Mar 30, 2022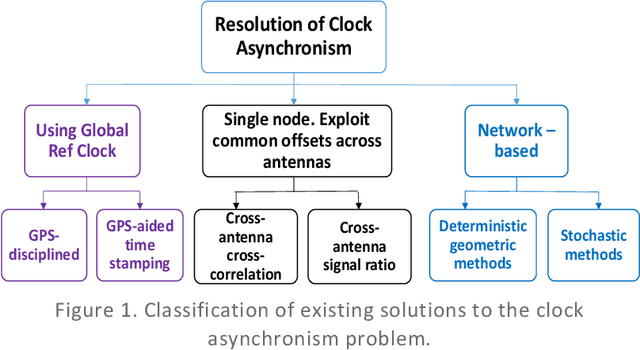
Clock asynchronism is a central problem in integrating radar sensing into communication networks. It can cause ranging ambiguity and prevent coherent processing of dis-continuous measurements in integration with asynchronous transceivers. Should it be resolved, sensing can be efficiently realized in communication networks, requiring little network infrastructure and hardware changes. This article provides a systematic overview of existing and potential new techniques for tackling this critical problem. We first review existing solutions, including using a fine-tuned global reference clock, and single-node-based and network-based techniques. We then examine open problems and research opportunities, offering insights into what may be better realized in each of the three solutions areas.
Practical Issues and Challenges in CSI-based Integrated Sensing and Communication
Mar 18, 2022Next-generation mobile communication network (i.e., 6G) has been envisioned to go beyond classical communication functionality and provide integrated sensing and communication (ISAC) capability to enable more emerging applications, such as smart cities, connected vehicles, AIoT and health care/elder care. Among all the ISAC proposals, the most practical and promising approach is to empower existing wireless network (e.g., WiFi, 4G/5G) with the augmented ability to sense the surrounding human and environment, and evolve wireless communication networks into intelligent communication and sensing network (e.g., 6G). In this paper, based on our experience on CSI-based wireless sensing with WiFi/4G/5G signals, we intend to identify ten major practical and theoretical problems that hinder real deployment of ISAC applications, and provide possible solutions to those critical challenges. Hopefully, this work will inspire further research to evolve existing WiFi/4G/5G networks into next-generation intelligent wireless network (i.e., 6G).
From Personalized Medicine to Population Health: A Survey of mHealth Sensing Techniques
Jul 02, 2021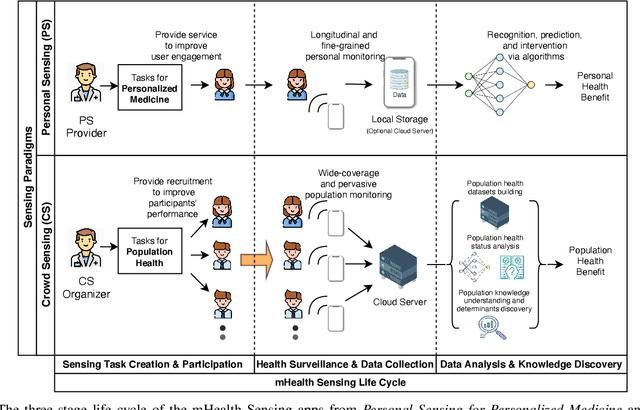
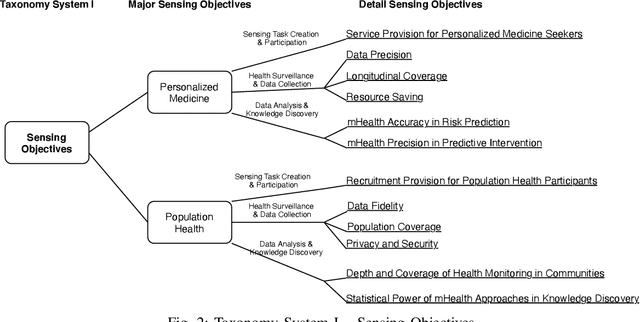
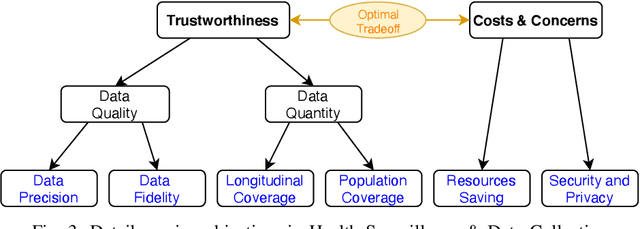
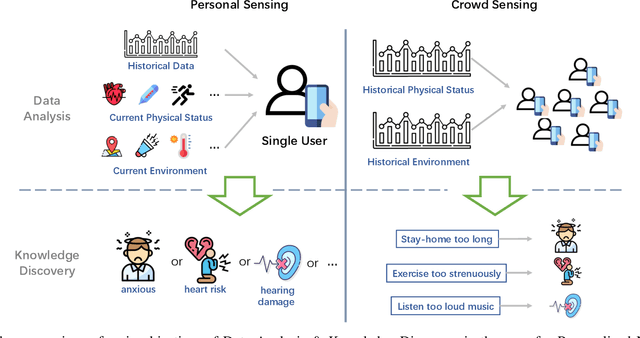
Mobile Sensing Apps have been widely used as a practical approach to collect behavioral and health-related information from individuals and provide timely intervention to promote health and well-beings, such as mental health and chronic cares. As the objectives of mobile sensing could be either \emph{(a) personalized medicine for individuals} or \emph{(b) public health for populations}, in this work we review the design of these mobile sensing apps, and propose to categorize the design of these apps/systems in two paradigms -- \emph{(i) Personal Sensing} and \emph{(ii) Crowd Sensing} paradigms. While both sensing paradigms might incorporate with common ubiquitous sensing technologies, such as wearable sensors, mobility monitoring, mobile data offloading, and/or cloud-based data analytics to collect and process sensing data from individuals, we present a novel taxonomy system with two major components that can specify and classify apps/systems from aspects of the life-cycle of mHealth Sensing: \emph{(1) Sensing Task Creation \& Participation}, \emph{(2) Health Surveillance \& Data Collection}, and \emph{(3) Data Analysis \& Knowledge Discovery}. With respect to different goals of the two paradigms, this work systematically reviews this field, and summarizes the design of typical apps/systems in the view of the configurations and interactions between these two components. In addition to summarization, the proposed taxonomy system also helps figure out the potential directions of mobile sensing for health from both personalized medicines and population health perspectives.
Inverse Reinforcement Learning with Multiple Ranked Experts
Jul 31, 2019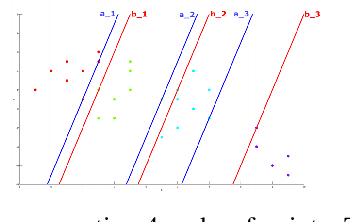
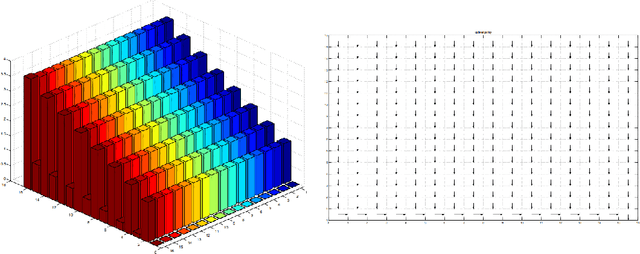
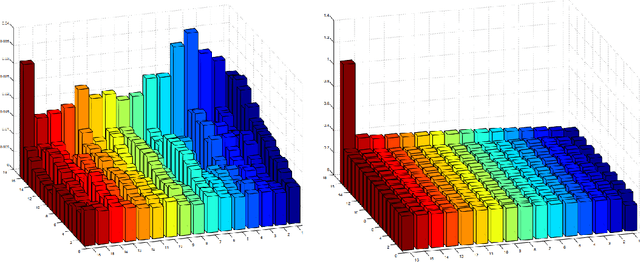
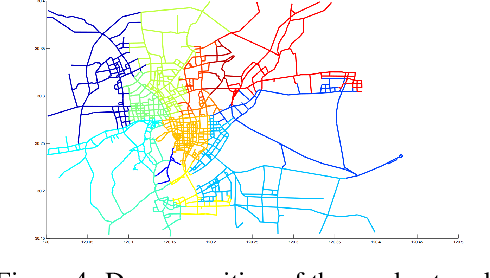
We consider the problem of learning to behave optimally in a Markov Decision Process when a reward function is not specified, but instead we have access to a set of demonstrators of varying performance. We assume the demonstrators are classified into one of k ranks, and use ideas from ordinal regression to find a reward function that maximizes the margin between the different ranks. This approach is based on the idea that agents should not only learn how to behave from experts, but also how not to behave from non-experts. We show there are MDPs where important differences in the reward function would be hidden from existing algorithms by the behaviour of the expert. Our method is particularly useful for problems where we have access to a large set of agent behaviours with varying degrees of expertise (such as through GPS or cellphones). We highlight the differences between our approach and existing methods using a simple grid domain and demonstrate its efficacy on determining passenger-finding strategies for taxi drivers, using a large dataset of GPS trajectories.
CrowdExpress: A Probabilistic Framework for On-Time Crowdsourced Package Deliveries
Sep 08, 2018
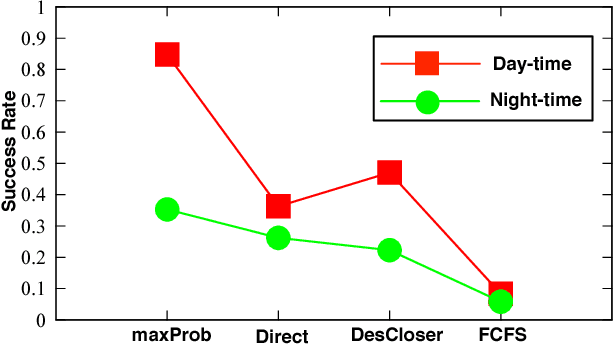
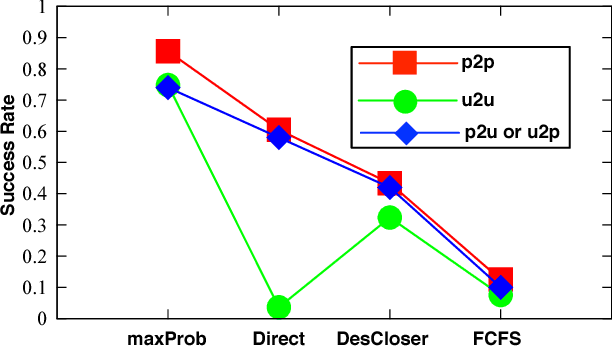
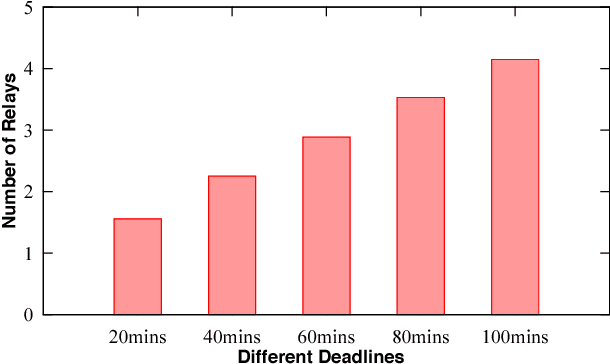
Speed and cost of logistics are two major concerns to on-line shoppers, but they generally conflict with each other in nature. To alleviate the contradiction, we propose to exploit existing taxis that are transporting passengers on the street to relay packages collaboratively, which can simultaneously lower the cost and accelerate the speed. Specifically, we propose a probabilistic framework containing two phases called CrowdExpress for the on-time package express deliveries. In the first phase, we mine the historical taxi GPS trajectory data offline to build the package transport network. In the second phase, we develop an online adaptive taxi scheduling algorithm to find the path with the maximum arriving-on-time probability "on-the-fly" upon real- time requests, and direct the package routing accordingly. Finally, we evaluate the system using the real-world taxi data generated by over 19,000 taxis in a month in the city of New York, US. Results show that around 9,500 packages can be delivered successfully on time per day with the success rate over 94%, moreover, the average computation time is within 25 milliseconds.