 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteering Code LLMs with Activation Directions for Language and Library Control
Mar 24, 2026Code LLMs often default to particular programming languages and libraries under neutral prompts. We investigate whether these preferences are encoded as approximately linear directions in activation space that can be manipulated at inference time. Using a difference-in-means method, we estimate layer-wise steering vectors for five language/library pairs and add them to model hidden states during generation. Across three open-weight code LLMs, these interventions substantially increase generation toward the target ecosystem under neutral prompts and often remain effective even when prompts explicitly request the opposite choice. Steering strength varies by model and target, with common ecosystems easier to induce than rarer alternatives, and overly strong interventions can reduce output quality. Overall, our results suggest that code-style preferences in LLMs are partly represented by compact, steerable structure in activation space.
Agnostics: Learning to Code in Any Programming Language via Reinforcement with a Universal Learning Environment
Aug 06, 2025Large language models (LLMs) already excel at writing code in high-resource languages such as Python and JavaScript, yet stumble on low-resource languages that remain essential to science and engineering. Besides the obvious shortage of pre-training data, post-training itself is a bottleneck: every new language seems to require new datasets, test harnesses, and reinforcement-learning (RL) infrastructure. We introduce Agnostics, a language-agnostic post-training pipeline that eliminates this per-language engineering. The key idea is to judge code solely by its externally observable behavior, so a single verifier can test solutions written in any language. Concretely, we (i) use an LLM to rewrite existing unit-test datasets into an I/O format, (ii) supply a short configuration that tells the verifier how to compile and run a target language, and (iii) apply reinforcement learning with verifiable rewards (RLVR) in a robust code execution environment. Applied to five low-resource languages--Lua, Julia, R, OCaml, and Fortran--Agnostics (1) improves Qwen-3 4B to performance that rivals other 16B-70B open-weight models; (2) scales cleanly to larger and diverse model families (Qwen-3 8B, DeepSeek Coder 6.7B Instruct, Phi 4 Mini); and (3) for ${\le} 16$B parameter models, sets new state-of-the-art pass@1 results on MultiPL-E and a new multi-language version LiveCodeBench that we introduce. We will release the language-agnostic training datasets (Ag-MBPP-X, Ag-Codeforces-X, Ag-LiveCodeBench-X), training code, and ready-to-use configurations, making RL post-training in any programming language as simple as editing a short YAML file.
Leveraging AI for Productive and Trustworthy HPC Software: Challenges and Research Directions
May 13, 2025We discuss the challenges and propose research directions for using AI to revolutionize the development of high-performance computing (HPC) software. AI technologies, in particular large language models, have transformed every aspect of software development. For its part, HPC software is recognized as a highly specialized scientific field of its own. We discuss the challenges associated with leveraging state-of-the-art AI technologies to develop such a unique and niche class of software and outline our research directions in the two US Department of Energy--funded projects for advancing HPC Software via AI: Ellora and Durban.
PhD Knowledge Not Required: A Reasoning Challenge for Large Language Models
Feb 03, 2025



Existing benchmarks for frontier models often test specialized, ``PhD-level'' knowledge that is difficult for non-experts to grasp. In contrast, we present a benchmark based on the NPR Sunday Puzzle Challenge that requires only general knowledge. Our benchmark is challenging for both humans and models, however correct solutions are easy to verify, and models' mistakes are easy to spot. Our work reveals capability gaps that are not evident in existing benchmarks: OpenAI o1 significantly outperforms other reasoning models that are on par on benchmarks that test specialized knowledge. Furthermore, our analysis of reasoning outputs uncovers new kinds of failures. DeepSeek R1, for instance, often concedes with ``I give up'' before providing an answer that it knows is wrong. R1 can also be remarkably ``uncertain'' in its output and in rare cases, it does not ``finish thinking,'' which suggests the need for an inference-time technique to ``wrap up'' before the context window limit is reached. We also quantify the effectiveness of reasoning longer with R1 and Gemini Thinking to identify the point beyond which more reasoning is unlikely to improve accuracy on our benchmark.
SelfCodeAlign: Self-Alignment for Code Generation
Oct 31, 2024



Instruction tuning is a supervised fine-tuning approach that significantly improves the ability of large language models (LLMs) to follow human instructions. We propose SelfCodeAlign, the first fully transparent and permissive pipeline for self-aligning code LLMs without extensive human annotations or distillation. SelfCodeAlign employs the same base model for inference throughout the data generation process. It first extracts diverse coding concepts from high-quality seed snippets to generate new tasks. It then samples multiple responses per task, pairs each with test cases, and validates them in a sandbox environment. Finally, passing examples are selected for instruction tuning. In our primary experiments, we use SelfCodeAlign with CodeQwen1.5-7B to generate a dataset of 74k instruction-response pairs. Finetuning on this dataset leads to a model that achieves a 67.1 pass@1 on HumanEval+, surpassing CodeLlama-70B-Instruct despite being ten times smaller. Across all benchmarks, this finetuned model consistently outperforms the original version trained with OctoPack, the previous state-of-the-art method for instruction tuning without human annotations or distillation. Additionally, we show that SelfCodeAlign is effective across LLMs of various sizes, from 3B to 33B, and that the base models can benefit more from alignment with their own data distribution. We further validate each component's effectiveness in our pipeline, showing that SelfCodeAlign outperforms both direct distillation from GPT-4o and leading GPT-3.5-based distillation methods, such as OSS-Instruct and Evol-Instruct. SelfCodeAlign has also led to the creation of StarCoder2-Instruct, the first fully transparent, permissively licensed, and self-aligned code LLM that achieves state-of-the-art coding performance.
Creating and Repairing Robot Programs in Open-World Domains
Oct 24, 2024Using Large Language Models (LLMs) to produce robot programs from natural language has allowed for robot systems that can complete a higher diversity of tasks. However, LLM-generated programs may be faulty, either due to ambiguity in instructions, misinterpretation of the desired task, or missing information about the world state. As these programs run, the state of the world changes and they gather new information. When a failure occurs, it is important that they recover from the current world state and avoid repeating steps that they they previously completed successfully. We propose RoboRepair, a system which traces the execution of a program up until error, and then runs an LLM-produced recovery program that minimizes repeated actions. To evaluate the efficacy of our system, we create a benchmark consisting of eleven tasks with various error conditions that require the generation of a recovery program. We compare the efficiency of the recovery program to a plan built with an oracle that has foreknowledge of future errors.
NNsight and NDIF: Democratizing Access to Foundation Model Internals
Jul 18, 2024



The enormous scale of state-of-the-art foundation models has limited their accessibility to scientists, because customized experiments at large model sizes require costly hardware and complex engineering that is impractical for most researchers. To alleviate these problems, we introduce NNsight, an open-source Python package with a simple, flexible API that can express interventions on any PyTorch model by building computation graphs. We also introduce NDIF, a collaborative research platform providing researchers access to foundation-scale LLMs via the NNsight API. Code, documentation, and tutorials are available at https://www.nnsight.net.
Robo-Instruct: Simulator-Augmented Instruction Alignment For Finetuning CodeLLMs
May 30, 2024Large language models (LLMs) have shown great promise at generating robot programs from natural language given domain-specific robot application programming interfaces (APIs). However, the performance gap between proprietary LLMs and smaller open-weight LLMs remains wide. This raises a question: Can we fine-tune smaller open-weight LLMs for generating domain-specific robot programs to close the performance gap with proprietary LLMs? While Self-Instruct is a promising solution by generating a diverse set of training data, it cannot verify the correctness of these programs. In contrast, a robot simulator with a well-defined world can identify execution errors but limits the diversity of programs that it can verify. In this work, we introduce Robo-Instruct, which brings the best of both worlds -- it promotes the diversity of Self-Instruct while providing the correctness of simulator-based checking. Robo-Instruct introduces RoboSim to synthesize a consistent world state on the fly by inferring properties relevant to the program being checked, and simulating actions accordingly. Furthermore, the instructions and programs generated by Self-Instruct may be subtly inconsistent -- such as the program missing a step implied by the instruction. Robo-Instruct further addresses this with InstAlign, an instruction-program alignment procedure that revises the task instruction to reflect the actual results of the generated program. Given a few seed task descriptions and the robot APIs, Robo-Instruct is capable of generating a training dataset using only a small open-weight model. This dataset can then be used to fine-tune small open-weight language models, enabling them to match or even exceed the performance of several proprietary LLMs, such as GPT-3.5-Turbo and Gemini-Pro.
Activation Steering for Robust Type Prediction in CodeLLMs
Apr 02, 2024



Contemporary LLMs pretrained on code are capable of succeeding at a wide variety of programming tasks. However, their performance is very sensitive to syntactic features, such as the names of variables and types, the structure of code, and presence of type hints. We contribute an inference-time technique to make CodeLLMs more robust to syntactic distractors that are semantically irrelevant. Our methodology relies on activation steering, which involves editing internal model activations to steer the model towards the correct prediction. We contribute a novel way to construct steering vectors by taking inspiration from mutation testing, which constructs minimal semantics-breaking code edits. In contrast, we construct steering vectors from semantics-preserving code edits. We apply our approach to the task of type prediction for the gradually typed languages Python and TypeScript. This approach corrects up to 90% of type mispredictions. Finally, we show that steering vectors calculated from Python activations reliably correct type mispredictions in TypeScript, and vice versa. This result suggests that LLMs may be learning to transfer knowledge of types across programming languages.
StarCoder 2 and The Stack v2: The Next Generation
Feb 29, 2024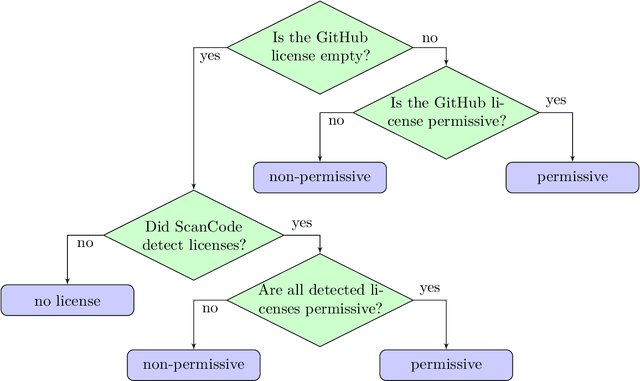
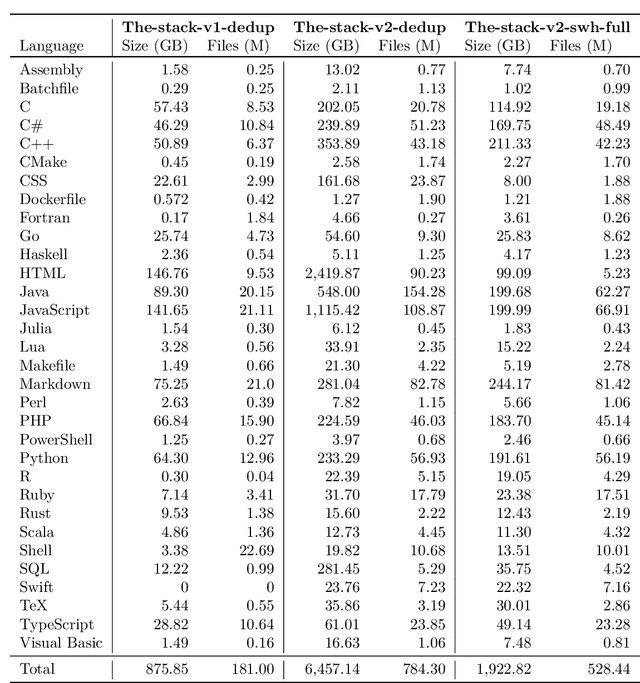
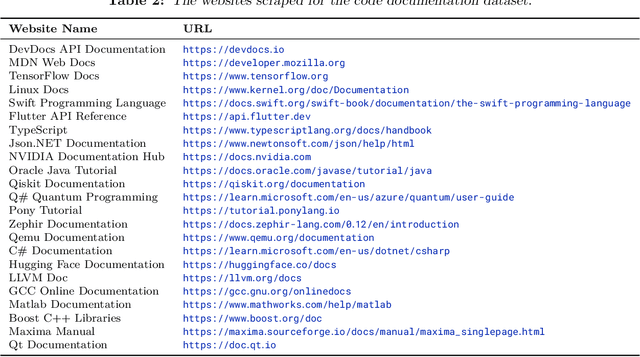
The BigCode project, an open-scientific collaboration focused on the responsible development of Large Language Models for Code (Code LLMs), introduces StarCoder2. In partnership with Software Heritage (SWH), we build The Stack v2 on top of the digital commons of their source code archive. Alongside the SWH repositories spanning 619 programming languages, we carefully select other high-quality data sources, such as GitHub pull requests, Kaggle notebooks, and code documentation. This results in a training set that is 4x larger than the first StarCoder dataset. We train StarCoder2 models with 3B, 7B, and 15B parameters on 3.3 to 4.3 trillion tokens and thoroughly evaluate them on a comprehensive set of Code LLM benchmarks. We find that our small model, StarCoder2-3B, outperforms other Code LLMs of similar size on most benchmarks, and also outperforms StarCoderBase-15B. Our large model, StarCoder2- 15B, significantly outperforms other models of comparable size. In addition, it matches or outperforms CodeLlama-34B, a model more than twice its size. Although DeepSeekCoder- 33B is the best-performing model at code completion for high-resource languages, we find that StarCoder2-15B outperforms it on math and code reasoning benchmarks, as well as several low-resource languages. We make the model weights available under an OpenRAIL license and ensure full transparency regarding the training data by releasing the SoftWare Heritage persistent IDentifiers (SWHIDs) of the source code data.