 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMastering the Minority: An Uncertainty-guided Multi-Expert Framework for Challenging-tailed Sequence Learning
Mar 16, 2026Imbalanced data distribution remains a critical challenge in sequential learning, leading models to easily recognize frequent categories while failing to detect minority classes adequately. The Mixture-of-Experts model offers a scalable solution, yet its application is often hindered by parameter inefficiency, poor expert specialization, and difficulty in resolving prediction conflicts. To Master the Minority classes effectively, we propose the Uncertainty-based Multi-Expert fusion network (UME) framework. UME is designed with three core innovations: First, we employ Ensemble LoRA for parameter-efficient modeling, significantly reducing the trainable parameter count. Second, we introduce Sequential Specialization guided by Dempster-Shafer Theory (DST), which ensures effective specialization on the challenging-tailed classes. Finally, an Uncertainty-Guided Fusion mechanism uses DST's certainty measures to dynamically weigh expert opinions, resolving conflicts by prioritizing the most confident expert for reliable final predictions. Extensive experiments across four public hierarchical text classification datasets demonstrate that UME achieves state-of-the-art performance. We achieve a performance gain of up to 17.97\% over the best baseline on individual categories, while reducing trainable parameters by up to 10.32\%. The findings highlight that uncertainty-guided expert coordination is a principled strategy for addressing challenging-tailed sequence learning. Our code is available at https://github.com/CQUPTWZX/Multi-experts.
Agnostics: Learning to Code in Any Programming Language via Reinforcement with a Universal Learning Environment
Aug 06, 2025Large language models (LLMs) already excel at writing code in high-resource languages such as Python and JavaScript, yet stumble on low-resource languages that remain essential to science and engineering. Besides the obvious shortage of pre-training data, post-training itself is a bottleneck: every new language seems to require new datasets, test harnesses, and reinforcement-learning (RL) infrastructure. We introduce Agnostics, a language-agnostic post-training pipeline that eliminates this per-language engineering. The key idea is to judge code solely by its externally observable behavior, so a single verifier can test solutions written in any language. Concretely, we (i) use an LLM to rewrite existing unit-test datasets into an I/O format, (ii) supply a short configuration that tells the verifier how to compile and run a target language, and (iii) apply reinforcement learning with verifiable rewards (RLVR) in a robust code execution environment. Applied to five low-resource languages--Lua, Julia, R, OCaml, and Fortran--Agnostics (1) improves Qwen-3 4B to performance that rivals other 16B-70B open-weight models; (2) scales cleanly to larger and diverse model families (Qwen-3 8B, DeepSeek Coder 6.7B Instruct, Phi 4 Mini); and (3) for ${\le} 16$B parameter models, sets new state-of-the-art pass@1 results on MultiPL-E and a new multi-language version LiveCodeBench that we introduce. We will release the language-agnostic training datasets (Ag-MBPP-X, Ag-Codeforces-X, Ag-LiveCodeBench-X), training code, and ready-to-use configurations, making RL post-training in any programming language as simple as editing a short YAML file.
PhD Knowledge Not Required: A Reasoning Challenge for Large Language Models
Feb 03, 2025



Existing benchmarks for frontier models often test specialized, ``PhD-level'' knowledge that is difficult for non-experts to grasp. In contrast, we present a benchmark based on the NPR Sunday Puzzle Challenge that requires only general knowledge. Our benchmark is challenging for both humans and models, however correct solutions are easy to verify, and models' mistakes are easy to spot. Our work reveals capability gaps that are not evident in existing benchmarks: OpenAI o1 significantly outperforms other reasoning models that are on par on benchmarks that test specialized knowledge. Furthermore, our analysis of reasoning outputs uncovers new kinds of failures. DeepSeek R1, for instance, often concedes with ``I give up'' before providing an answer that it knows is wrong. R1 can also be remarkably ``uncertain'' in its output and in rare cases, it does not ``finish thinking,'' which suggests the need for an inference-time technique to ``wrap up'' before the context window limit is reached. We also quantify the effectiveness of reasoning longer with R1 and Gemini Thinking to identify the point beyond which more reasoning is unlikely to improve accuracy on our benchmark.
Learning Wheelchair Tennis Navigation from Broadcast Videos with Domain Knowledge Transfer and Diffusion Motion Planning
Sep 29, 2024



In this paper, we propose a novel and generalizable zero-shot knowledge transfer framework that distills expert sports navigation strategies from web videos into robotic systems with adversarial constraints and out-of-distribution image trajectories. Our pipeline enables diffusion-based imitation learning by reconstructing the full 3D task space from multiple partial views, warping it into 2D image space, closing the planning loop within this 2D space, and transfer constrained motion of interest back to task space. Additionally, we demonstrate that the learned policy can serve as a local planner in conjunction with position control. We apply this framework in the wheelchair tennis navigation problem to guide the wheelchair into the ball-hitting region. Our pipeline achieves a navigation success rate of 97.67% in reaching real-world recorded tennis ball trajectories with a physical robot wheelchair, and achieve a success rate of 68.49% in a real-world, real-time experiment on a full-sized tennis court.
Learning Dynamics of a Ball with Differentiable Factor Graph and Roto-Translational Invariant Representations
Sep 24, 2024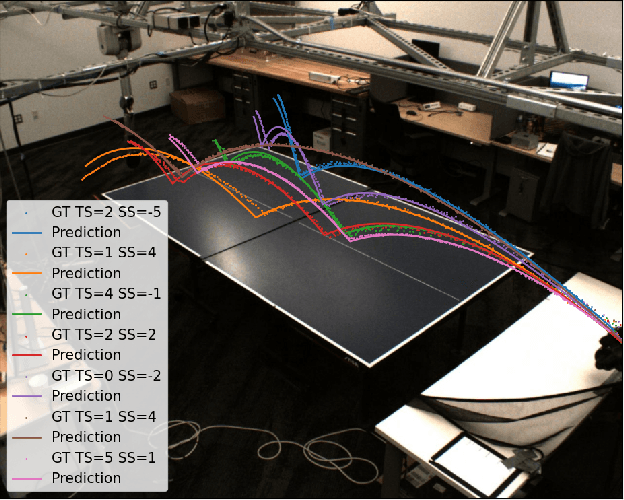
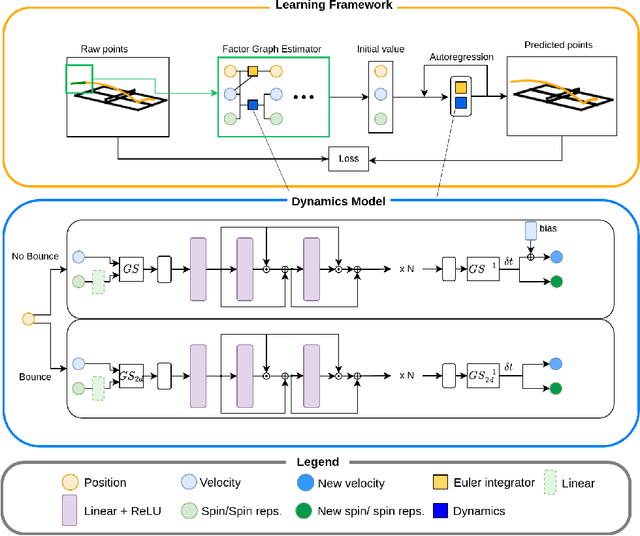
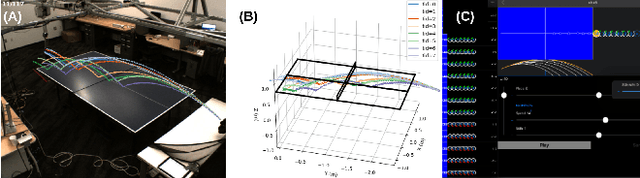
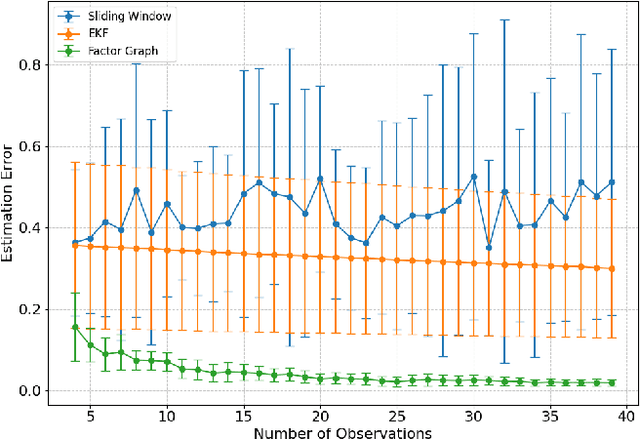
Robots in dynamic environments need fast, accurate models of how objects move in their environments to support agile planning. In sports such as ping pong, analytical models often struggle to accurately predict ball trajectories with spins due to complex aerodynamics, elastic behaviors, and the challenges of modeling sliding and rolling friction. On the other hand, despite the promise of data-driven methods, machine learning struggles to make accurate, consistent predictions without precise input. In this paper, we propose an end-to-end learning framework that can jointly train a dynamics model and a factor graph estimator. Our approach leverages a Gram-Schmidt (GS) process to extract roto-translational invariant representations to improve the model performance, which can further reduce the validation error compared to data augmentation method. Additionally, we propose a network architecture that enhances nonlinearity by using self-multiplicative bypasses in the layer connections. By leveraging these novel methods, our proposed approach predicts the ball's position with an RMSE of 37.2 mm of the paddle radius at the apex after the first bounce, and 71.5 mm after the second bounce.
GlyphPattern: An Abstract Pattern Recognition for Vision-Language Models
Aug 12, 2024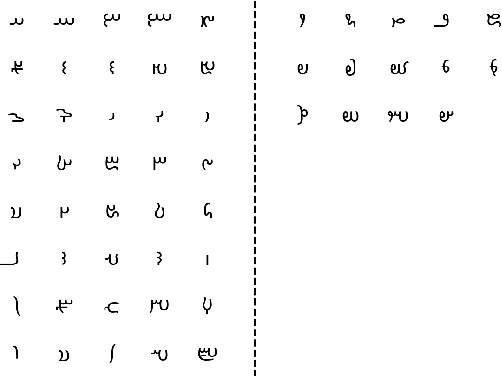
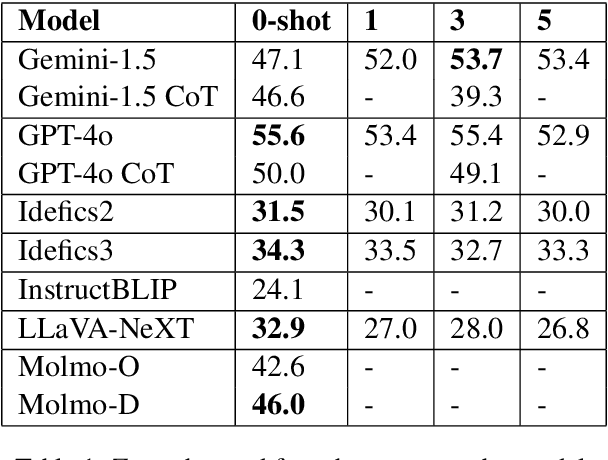
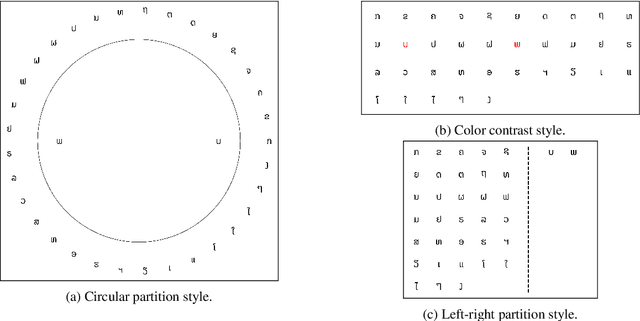
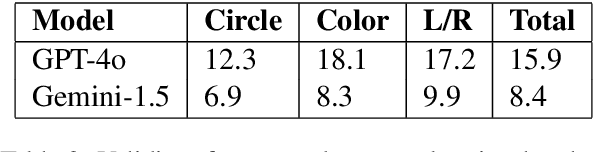
Vision-Language Models (VLMs) building upon the foundation of powerful large language models have made rapid progress in reasoning across visual and textual data. While VLMs perform well on vision tasks that they are trained on, our results highlight key challenges in abstract pattern recognition. We present GlyphPattern, a 954 item dataset that pairs 318 human-written descriptions of visual patterns from 40 writing systems with three visual presentation styles. GlyphPattern evaluates abstract pattern recognition in VLMs, requiring models to understand and judge natural language descriptions of visual patterns. GlyphPattern patterns are drawn from a large-scale cognitive science investigation of human writing systems; as a result, they are rich in spatial reference and compositionality. Our experiments show that GlyphPattern is challenging for state-of-the-art VLMs (GPT-4o achieves only 55% accuracy), with marginal gains from few-shot prompting. Our detailed error analysis reveals challenges at multiple levels, including visual processing, natural language understanding, and pattern generalization.
Diffusion-Reinforcement Learning Hierarchical Motion Planning in Adversarial Multi-agent Games
Mar 16, 2024



Reinforcement Learning- (RL-)based motion planning has recently shown the potential to outperform traditional approaches from autonomous navigation to robot manipulation. In this work, we focus on a motion planning task for an evasive target in a partially observable multi-agent adversarial pursuit-evasion games (PEG). These pursuit-evasion problems are relevant to various applications, such as search and rescue operations and surveillance robots, where robots must effectively plan their actions to gather intelligence or accomplish mission tasks while avoiding detection or capture themselves. We propose a hierarchical architecture that integrates a high-level diffusion model to plan global paths responsive to environment data while a low-level RL algorithm reasons about evasive versus global path-following behavior. Our approach outperforms baselines by 51.2% by leveraging the diffusion model to guide the RL algorithm for more efficient exploration and improves the explanability and predictability.
Diffusion Based Multi-Agent Adversarial Tracking
Jul 12, 2023



Target tracking plays a crucial role in real-world scenarios, particularly in drug-trafficking interdiction, where the knowledge of an adversarial target's location is often limited. Improving autonomous tracking systems will enable unmanned aerial, surface, and underwater vehicles to better assist in interdicting smugglers that use manned surface, semi-submersible, and aerial vessels. As unmanned drones proliferate, accurate autonomous target estimation is even more crucial for security and safety. This paper presents Constrained Agent-based Diffusion for Enhanced Multi-Agent Tracking (CADENCE), an approach aimed at generating comprehensive predictions of adversary locations by leveraging past sparse state information. To assess the effectiveness of this approach, we evaluate predictions on single-target and multi-target pursuit environments, employing Monte-Carlo sampling of the diffusion model to estimate the probability associated with each generated trajectory. We propose a novel cross-attention based diffusion model that utilizes constraint-based sampling to generate multimodal track hypotheses. Our single-target model surpasses the performance of all baseline methods on Average Displacement Error (ADE) for predictions across all time horizons.
Learning Models of Adversarial Agent Behavior under Partial Observability
Jul 05, 2023The need for opponent modeling and tracking arises in several real-world scenarios, such as professional sports, video game design, and drug-trafficking interdiction. In this work, we present Graph based Adversarial Modeling with Mutal Information (GrAMMI) for modeling the behavior of an adversarial opponent agent. GrAMMI is a novel graph neural network (GNN) based approach that uses mutual information maximization as an auxiliary objective to predict the current and future states of an adversarial opponent with partial observability. To evaluate GrAMMI, we design two large-scale, pursuit-evasion domains inspired by real-world scenarios, where a team of heterogeneous agents is tasked with tracking and interdicting a single adversarial agent, and the adversarial agent must evade detection while achieving its own objectives. With the mutual information formulation, GrAMMI outperforms all baselines in both domains and achieves 31.68% higher log-likelihood on average for future adversarial state predictions across both domains.
Adversarial Search and Track with Multiagent Reinforcement Learning in Sparsely Observable Environment
Jun 20, 2023We study a search and tracking (S&T) problem for a team of dynamic search agents to capture an adversarial evasive agent with only sparse temporal and spatial knowledge of its location in this paper. The domain is challenging for traditional Reinforcement Learning (RL) approaches as the large space leads to sparse observations of the adversary and in turn sparse rewards for the search agents. Additionally, the opponent's behavior is reactionary to the search agents, which causes a data distribution shift for RL during training as search agents improve their policies. We propose a differentiable Multi-Agent RL (MARL) architecture that utilizes a novel filtering module to supplement estimated adversary location information and enables the effective learning of a team policy. Our algorithm learns how to balance information from prior knowledge and a motion model to remain resilient to the data distribution shift and outperforms all baseline methods with a 46% increase of detection rate.