 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Wheelchair Tennis Navigation from Broadcast Videos with Domain Knowledge Transfer and Diffusion Motion Planning
Sep 29, 2024



In this paper, we propose a novel and generalizable zero-shot knowledge transfer framework that distills expert sports navigation strategies from web videos into robotic systems with adversarial constraints and out-of-distribution image trajectories. Our pipeline enables diffusion-based imitation learning by reconstructing the full 3D task space from multiple partial views, warping it into 2D image space, closing the planning loop within this 2D space, and transfer constrained motion of interest back to task space. Additionally, we demonstrate that the learned policy can serve as a local planner in conjunction with position control. We apply this framework in the wheelchair tennis navigation problem to guide the wheelchair into the ball-hitting region. Our pipeline achieves a navigation success rate of 97.67% in reaching real-world recorded tennis ball trajectories with a physical robot wheelchair, and achieve a success rate of 68.49% in a real-world, real-time experiment on a full-sized tennis court.
Learning Dynamics of a Ball with Differentiable Factor Graph and Roto-Translational Invariant Representations
Sep 24, 2024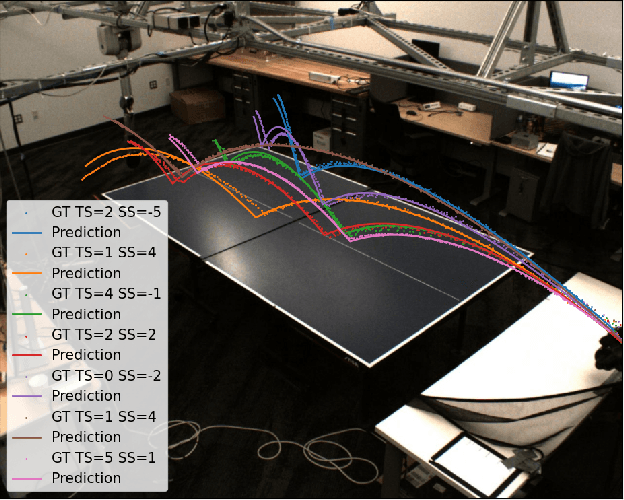
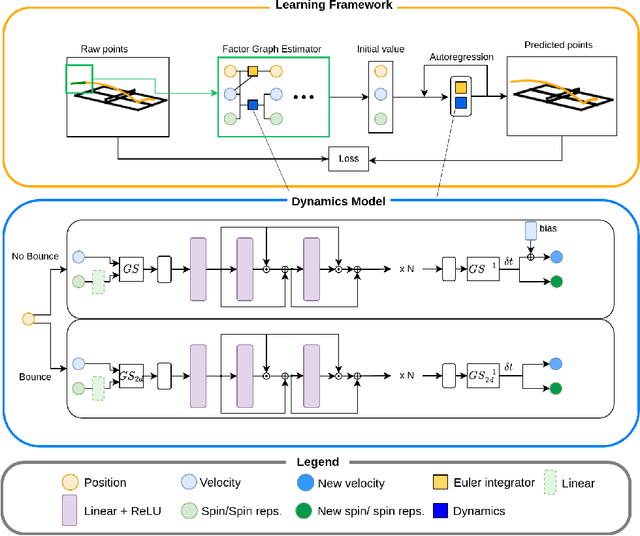
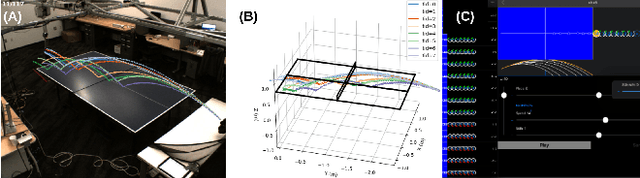
Robots in dynamic environments need fast, accurate models of how objects move in their environments to support agile planning. In sports such as ping pong, analytical models often struggle to accurately predict ball trajectories with spins due to complex aerodynamics, elastic behaviors, and the challenges of modeling sliding and rolling friction. On the other hand, despite the promise of data-driven methods, machine learning struggles to make accurate, consistent predictions without precise input. In this paper, we propose an end-to-end learning framework that can jointly train a dynamics model and a factor graph estimator. Our approach leverages a Gram-Schmidt (GS) process to extract roto-translational invariant representations to improve the model performance, which can further reduce the validation error compared to data augmentation method. Additionally, we propose a network architecture that enhances nonlinearity by using self-multiplicative bypasses in the layer connections. By leveraging these novel methods, our proposed approach predicts the ball's position with an RMSE of 37.2 mm of the paddle radius at the apex after the first bounce, and 71.5 mm after the second bounce.
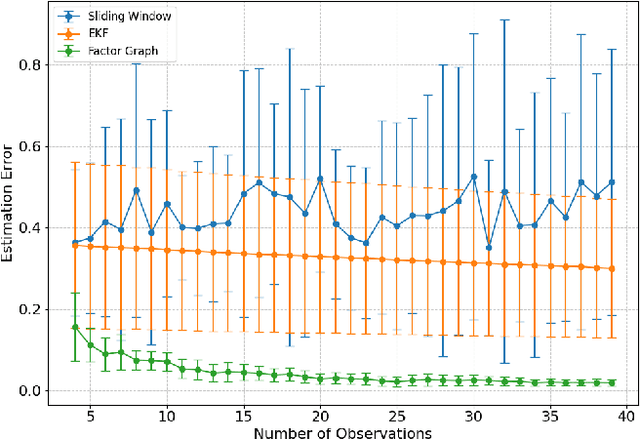
Multi-Camera Asynchronous Ball Localization and Trajectory Prediction with Factor Graphs and Human Poses
Jan 30, 2024The rapid and precise localization and prediction of a ball are critical for developing agile robots in ball sports, particularly in sports like tennis characterized by high-speed ball movements and powerful spins. The Magnus effect induced by spin adds complexity to trajectory prediction during flight and bounce dynamics upon contact with the ground. In this study, we introduce an innovative approach that combines a multi-camera system with factor graphs for real-time and asynchronous 3D tennis ball localization. Additionally, we estimate hidden states like velocity and spin for trajectory prediction. Furthermore, to enhance spin inference early in the ball's flight, where limited observations are available, we integrate human pose data using a temporal convolutional network (TCN) to compute spin priors within the factor graph. This refinement provides more accurate spin priors at the beginning of the factor graph, leading to improved early-stage hidden state inference for prediction. Our result shows the trained TCN can predict the spin priors with RMSE of 5.27 Hz. Integrating TCN into the factor graph reduces the prediction error of landing positions by over 63.6% compared to a baseline method that utilized an adaptive extended Kalman filter.
Efficient Force Estimation for Continuum Robot
Sep 26, 2021


External contact force is one of the most significant information for the robots to model, control, and safely interact with external objects. For continuum robots, it is possible to estimate the contact force based on the measurements of robot configurations, which addresses the difficulty of implementing the force sensor feedback on the robot body with strict dimension constraints. In this paper, we use local curvatures measured from fiber Bragg grating sensors (FBGS) to estimate the magnitude and location of single or multiple external contact forces. A simplified mechanics model is derived from Cosserat rod theory to compute continuum robot curvatures. Least-square optimization is utilized to estimate the forces by minimizing errors between computed curvatures and measured curvatures. The results show that the proposed method is able to accurately estimate the contact force magnitude (error: 5.25\% -- 12.87\%) and locations (error: 1.02\% -- 2.19\%). The calculation speed of the proposed method is validated in MATLAB. The results indicate that our approach is 29.0 -- 101.6 times faster than the conventional methods. These results indicate that the proposed method is accurate and efficient for contact force estimations.