 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating CAD Code with Vision-Language Models for 3D Designs
Oct 07, 2024



Generative AI has transformed the fields of Design and Manufacturing by providing efficient and automated methods for generating and modifying 3D objects. One approach involves using Large Language Models (LLMs) to generate Computer- Aided Design (CAD) scripting code, which can then be executed to render a 3D object; however, the resulting 3D object may not meet the specified requirements. Testing the correctness of CAD generated code is challenging due to the complexity and structure of 3D objects (e.g., shapes, surfaces, and dimensions) that are not feasible in code. In this paper, we introduce CADCodeVerify, a novel approach to iteratively verify and improve 3D objects generated from CAD code. Our approach works by producing ameliorative feedback by prompting a Vision-Language Model (VLM) to generate and answer a set of validation questions to verify the generated object and prompt the VLM to correct deviations. To evaluate CADCodeVerify, we introduce, CADPrompt, the first benchmark for CAD code generation, consisting of 200 natural language prompts paired with expert-annotated scripting code for 3D objects to benchmark progress. Our findings show that CADCodeVerify improves VLM performance by providing visual feedback, enhancing the structure of the 3D objects, and increasing the success rate of the compiled program. When applied to GPT-4, CADCodeVerify achieved a 7.30% reduction in Point Cloud distance and a 5.0% improvement in success rate compared to prior work
Learning Wheelchair Tennis Navigation from Broadcast Videos with Domain Knowledge Transfer and Diffusion Motion Planning
Sep 29, 2024



In this paper, we propose a novel and generalizable zero-shot knowledge transfer framework that distills expert sports navigation strategies from web videos into robotic systems with adversarial constraints and out-of-distribution image trajectories. Our pipeline enables diffusion-based imitation learning by reconstructing the full 3D task space from multiple partial views, warping it into 2D image space, closing the planning loop within this 2D space, and transfer constrained motion of interest back to task space. Additionally, we demonstrate that the learned policy can serve as a local planner in conjunction with position control. We apply this framework in the wheelchair tennis navigation problem to guide the wheelchair into the ball-hitting region. Our pipeline achieves a navigation success rate of 97.67% in reaching real-world recorded tennis ball trajectories with a physical robot wheelchair, and achieve a success rate of 68.49% in a real-world, real-time experiment on a full-sized tennis court.
Multi-Camera Asynchronous Ball Localization and Trajectory Prediction with Factor Graphs and Human Poses
Jan 30, 2024The rapid and precise localization and prediction of a ball are critical for developing agile robots in ball sports, particularly in sports like tennis characterized by high-speed ball movements and powerful spins. The Magnus effect induced by spin adds complexity to trajectory prediction during flight and bounce dynamics upon contact with the ground. In this study, we introduce an innovative approach that combines a multi-camera system with factor graphs for real-time and asynchronous 3D tennis ball localization. Additionally, we estimate hidden states like velocity and spin for trajectory prediction. Furthermore, to enhance spin inference early in the ball's flight, where limited observations are available, we integrate human pose data using a temporal convolutional network (TCN) to compute spin priors within the factor graph. This refinement provides more accurate spin priors at the beginning of the factor graph, leading to improved early-stage hidden state inference for prediction. Our result shows the trained TCN can predict the spin priors with RMSE of 5.27 Hz. Integrating TCN into the factor graph reduces the prediction error of landing positions by over 63.6% compared to a baseline method that utilized an adaptive extended Kalman filter.
The Effect of Robot Skill Level and Communication in Rapid, Proximate Human-Robot Collaboration
Apr 07, 2023As high-speed, agile robots become more commonplace, these robots will have the potential to better aid and collaborate with humans. However, due to the increased agility and functionality of these robots, close collaboration with humans can create safety concerns that alter team dynamics and degrade task performance. In this work, we aim to enable the deployment of safe and trustworthy agile robots that operate in proximity with humans. We do so by 1) Proposing a novel human-robot doubles table tennis scenario to serve as a testbed for studying agile, proximate human-robot collaboration and 2) Conducting a user-study to understand how attributes of the robot (e.g., robot competency or capacity to communicate) impact team dynamics, perceived safety, and perceived trust, and how these latent factors affect human-robot collaboration (HRC) performance. We find that robot competency significantly increases perceived trust ($p<.001$), extending skill-to-trust assessments in prior studies to agile, proximate HRC. Furthermore, interestingly, we find that when the robot vocalizes its intention to perform a task, it results in a significant decrease in team performance ($p=.037$) and perceived safety of the system ($p=.009$).
Utilizing Human Feedback for Primitive Optimization in Wheelchair Tennis
Dec 29, 2022Agile robotics presents a difficult challenge with robots moving at high speeds requiring precise and low-latency sensing and control. Creating agile motion that accomplishes the task at hand while being safe to execute is a key requirement for agile robots to gain human trust. This requires designing new approaches that are flexible and maintain knowledge over world constraints. In this paper, we consider the problem of building a flexible and adaptive controller for a challenging agile mobile manipulation task of hitting ground strokes on a wheelchair tennis robot. We propose and evaluate an extension to work done on learning striking behaviors using a probabilistic movement primitive (ProMP) framework by (1) demonstrating the safe execution of learned primitives on an agile mobile manipulator setup, and (2) proposing an online primitive refinement procedure that utilizes evaluative feedback from humans on the executed trajectories.
Athletic Mobile Manipulator System for Robotic Wheelchair Tennis
Oct 05, 2022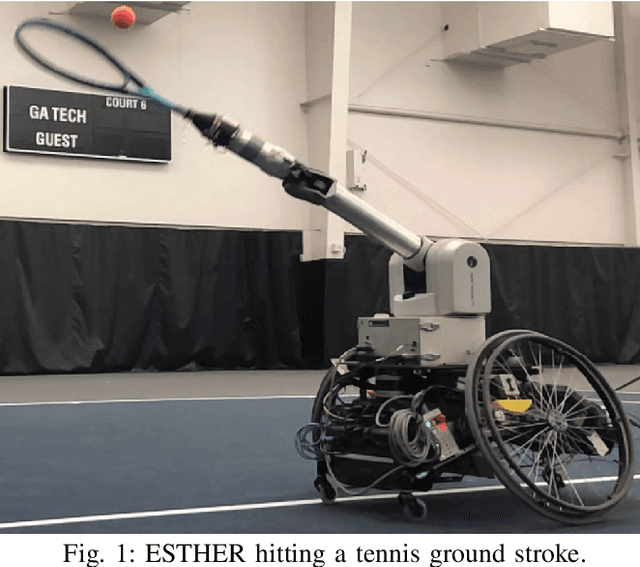
Athletics are a quintessential and universal expression of humanity. From French monks who in the 12th century invented jeu de paume, the precursor to modern lawn tennis, back to the K'iche' people who played the Maya Ballgame as a form of religious expression over three thousand years ago, humans have sought to train their minds and bodies to excel in sporting contests. Advances in robotics are opening up the possibility of robots in sports. Yet, key challenges remain, as most prior works in robotics for sports are limited to pristine sensing environments, do not require significant force generation, or are on miniaturized scales unsuited for joint human-robot play. In this paper, we propose the first open-source, autonomous robot for playing regulation wheelchair tennis. We demonstrate the performance of our full-stack system in executing ground strokes and evaluate each of the system's hardware and software components. The goal of this paper is to (1) inspire more research in human-scale robot athletics and (2) establish the first baseline towards developing a robot in future work that can serve as a teammate for mixed, human-robot doubles play. Our paper contributes to the science of systems design and poses a set of key challenges for the robotics community to address in striving towards a vision of human-robot collaboration in sports.