 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRareAlert: Aligning heterogeneous large language model reasoning for early rare disease risk screening
Jan 26, 2026Missed and delayed diagnosis remains a major challenge in rare disease care. At the initial clinical encounters, physicians assess rare disease risk using only limited information under high uncertainty. When high-risk patients are not recognised at this stage, targeted diagnostic testing is often not initiated, resulting in missed diagnosis. Existing primary care triage processes are structurally insufficient to reliably identify patients with rare diseases at initial clinical presentation and universal screening is needed to reduce diagnostic delay. Here we present RareAlert, an early screening system which predict patient-level rare disease risk from routinely available primary-visit information. RareAlert integrates reasoning generated by ten LLMs, calibrates and weights these signals using machine learning, and distils the aligned reasoning into a single locally deployable model. To develop and evaluate RareAlert, we curated RareBench, a real-world dataset of 158,666 cases covering 33 Orphanet disease categories and more than 7,000 rare conditions, including both rare and non-rare presentations. The results showed that rare disease identification can be reconceptualised as a universal uncertainty resolution process applied to the general patient population. On an independent test set, RareAlert, a Qwen3-4B based model trained with calibrated reasoning signals, achieved an AUC of 0.917, outperforming the best machine learning ensemble and all evaluated LLMs, including GPT-5, DeepSeek-R1, Claude-3.7-Sonnet, o3-mini, Gemini-2.5-Pro, and Qwen3-235B. These findings demonstrate the diversity in LLM medical reasoning and the effectiveness of aligning such reasoning in highly uncertain clinical tasks. By incorporating calibrated reasoning into a single model, RareAlert enables accurate, privacy-preserving, and scalable rare disease risk screening suitable for large-scale local deployment.
Task-driven SLAM Benchmarking
Sep 25, 2024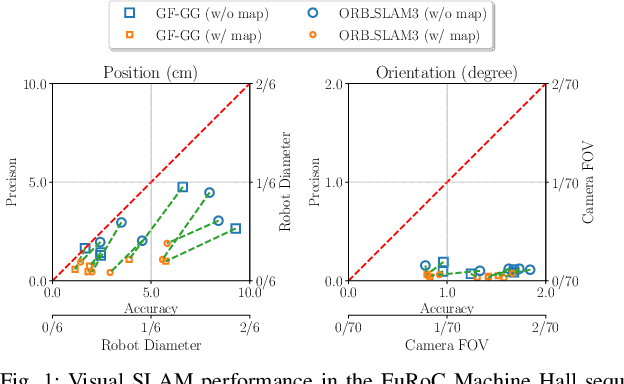
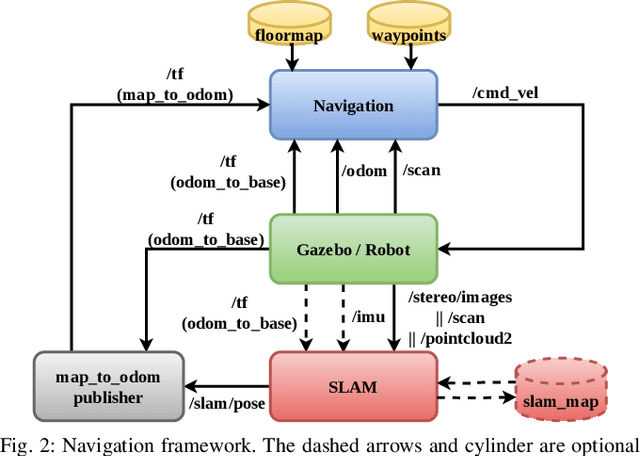
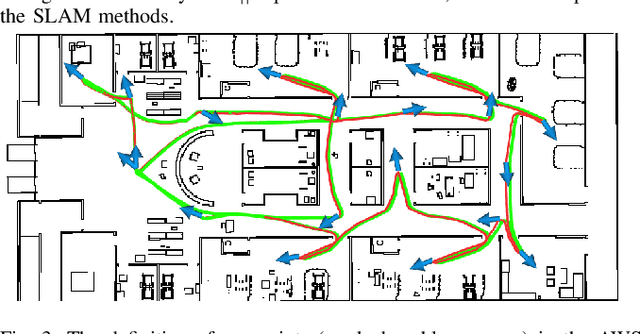
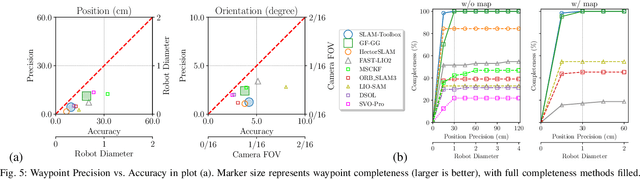
For assistive robots, one critical use case of SLAM is to support localization as they navigate through an environment completing tasks. Current SLAM benchmarks do not consider task-based deployments where repeatability (precision) is more critical than accuracy. To address this gap, we propose a task-driven benchmarking framework for evaluating SLAM methods. The framework accounts for SLAM's mapping capabilities, employs precision as a key metric, and has low resource requirements to implement. Testing of state-of-the-art SLAM methods in both simulated and real-world scenarios provides insights into the performance properties of modern SLAM solutions. In particular, it shows that passive stereo SLAM operates at a level of precision comparable to LiDAR-based SLAM in typical indoor environments. The benchmarking approach offers a more relevant and accurate assessment of SLAM performance in task-driven applications.
LFIC-DRASC: Deep Light Field Image Compression Using Disentangled Representation and Asymmetrical Strip Convolution
Sep 18, 2024Light-Field (LF) image is emerging 4D data of light rays that is capable of realistically presenting spatial and angular information of 3D scene. However, the large data volume of LF images becomes the most challenging issue in real-time processing, transmission, and storage. In this paper, we propose an end-to-end deep LF Image Compression method Using Disentangled Representation and Asymmetrical Strip Convolution (LFIC-DRASC) to improve coding efficiency. Firstly, we formulate the LF image compression problem as learning a disentangled LF representation network and an image encoding-decoding network. Secondly, we propose two novel feature extractors that leverage the structural prior of LF data by integrating features across different dimensions. Meanwhile, disentangled LF representation network is proposed to enhance the LF feature disentangling and decoupling. Thirdly, we propose the LFIC-DRASC for LF image compression, where two Asymmetrical Strip Convolution (ASC) operators, i.e. horizontal and vertical, are proposed to capture long-range correlation in LF feature space. These two ASC operators can be combined with the square convolution to further decouple LF features, which enhances the model ability in representing intricate spatial relationships. Experimental results demonstrate that the proposed LFIC-DRASC achieves an average of 20.5\% bit rate reductions comparing with the state-of-the-art methods.
Safe Hierarchical Navigation in Crowded Dynamic Uncertain Environments
Mar 24, 2023
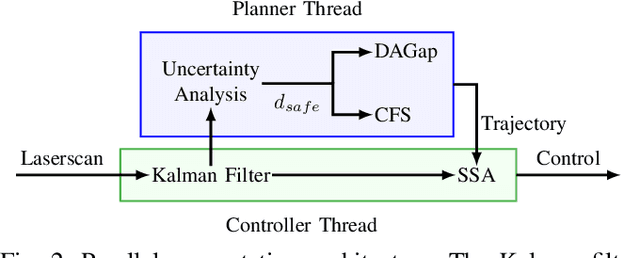


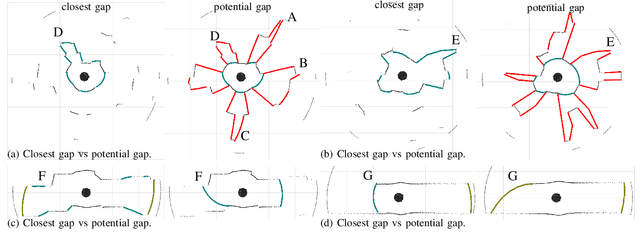
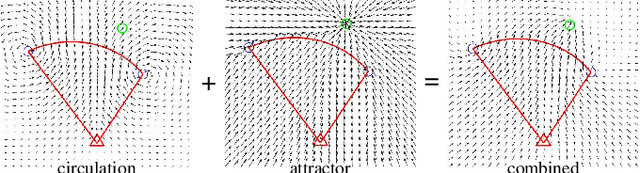
This paper describes a hierarchical solution consisting of a multi-phase planner and a low-level safe controller to jointly solve the safe navigation problem in crowded, dynamic, and uncertain environments. The planner employs dynamic gap analysis and trajectory optimization to achieve collision avoidance with respect to the predicted trajectories of dynamic agents within the sensing and planning horizon and with robustness to agent uncertainty. To address uncertainty over the planning horizon and real-time safety, a fast reactive safe set algorithm (SSA) is adopted, which monitors and modifies the unsafe control during trajectory tracking. Compared to other existing methods, our approach offers theoretical guarantees of safety and achieves collision-free navigation with higher probability in uncertain environments, as demonstrated in scenarios with 20 and 50 dynamic agents. Project website: https://hychen-naza.github.io/projects/HDAGap/.
Safer Gap: A Gap-based Local Planner for Safe Navigation with Nonholonomic Mobile Robots
Mar 14, 2023This paper extends the gap-based navigation technique in Potential Gap by guaranteeing safety for nonholonomic robots for all tiers of the local planner hierarchy, so called Safer Gap. The first tier generates a Bezier-based collision-free path through gaps. A subset of navigable free-space from the robot through a gap, called the keyhole, is defined to be the union of the largest collision-free disc centered on the robot and a trapezoidal region directed through the gap. It is encoded by a shallow neural network zeroing barrier function (ZBF). Nonlinear model predictive control (NMPC), with Keyhole ZBF constraints and output tracking of the Bezier path, synthesizes a safe kinematically-feasible trajectory. Low-level use of the Keyhole ZBF within a point-wise optimization-based safe control synthesis module serves as a final safety layer. Simulation and experimental validation of Safer Gap confirm its collision-free navigation properties.
Potential Gap: Using Reactive Policies to Guarantee Safe Navigation
Mar 21, 2021

This paper considers the integration of gap-based local navigation methods with artificial potential field (APF) methods to derive a local planning module for hierarchical navigation systems that has provable collision-free properties. Given that APF theory applies to idealized robot models, the provable properties are lost when applied to more realistic models. We describe a set of algorithm modifications that correct for these errors and enhance robustness to non-ideal models. Central to the construction of the local planner is the use of sensory-derived local free-space models that detect gaps and use them for the synthesis of the APF. Modifications are given for a nonholonomic robot model. Integration of the local planner, called potential gap, into a hierarchical navigation system provides the local goals and trajectories needed for collision-free navigation through unknown environments. Monte Carlo experiments in benchmark worlds confirm the asserted safety and robustness properties by testing under various robot models.
Trajectory Servoing: Image-Based Trajectory Tracking Using SLAM
Mar 06, 2021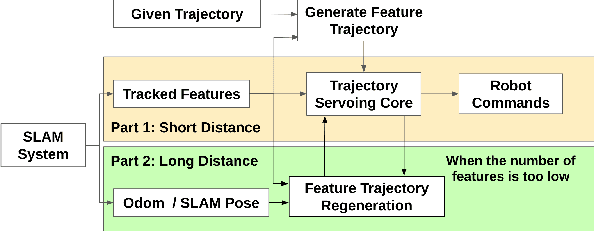
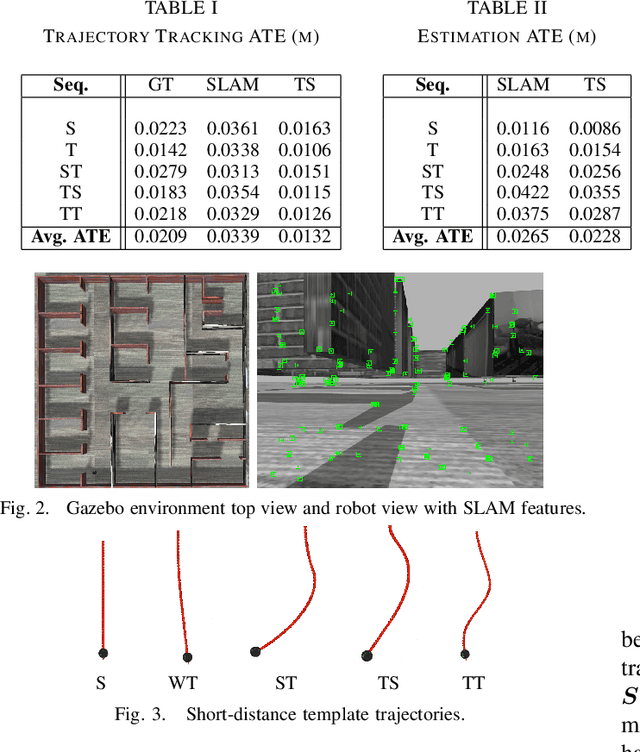
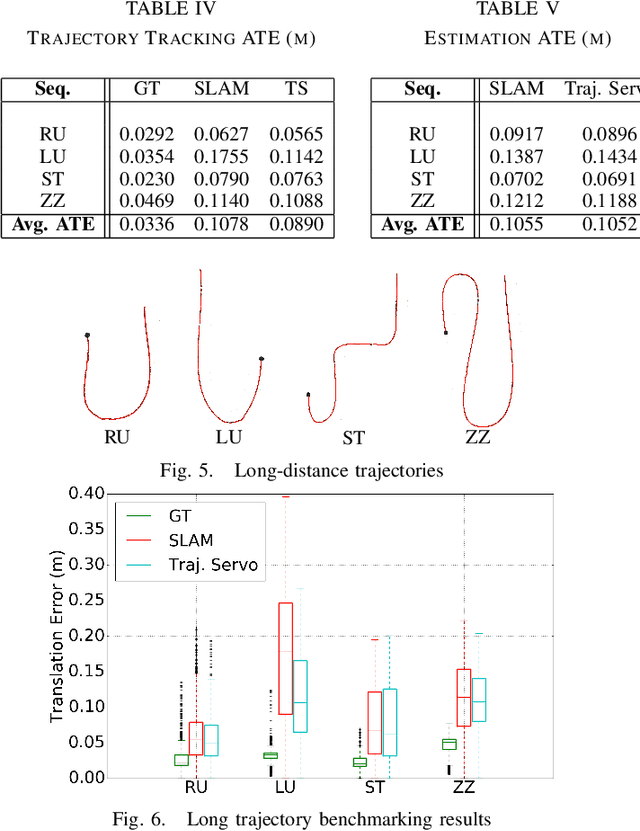
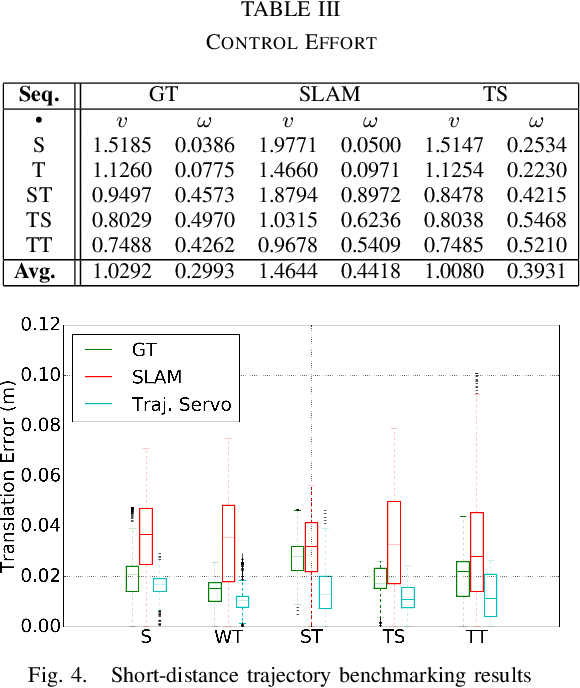
This paper describes an image based visual servoing (IBVS) system for a nonholonomic robot to achieve good trajectory following without real-time robot pose information and without a known visual map of the environment. We call it trajectory servoing. The critical component is a feature-based, indirect SLAM method to provide a pool of available features with estimated depth, so that they may be propagated forward in time to generate image feature trajectories for visual servoing. Short and long distance experiments show the benefits of trajectory servoing for navigating unknown areas without absolute positioning. Trajectory servoing is shown to be more accurate than pose-based feedback when both rely on the same underlying SLAM system.
Autonomous, Monocular, Vision-Based Snake Robot Navigation and Traversal of Cluttered Environments using Rectilinear Gait Motion
Aug 19, 2019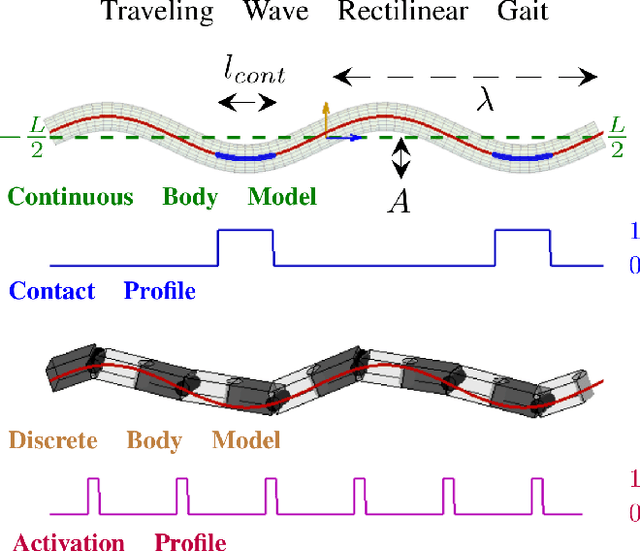
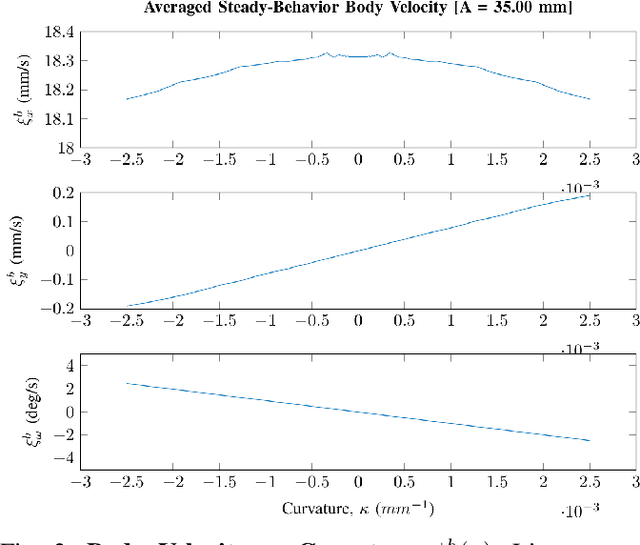
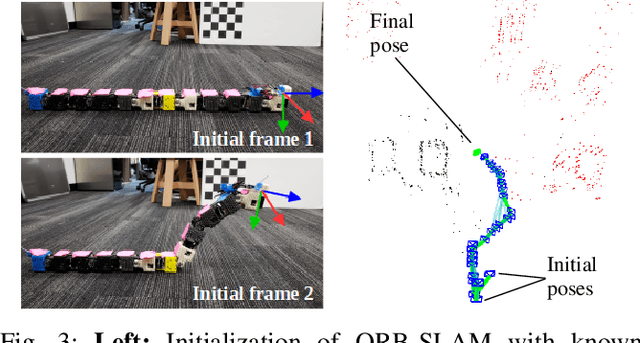

Rectilinear forms of snake-like robotic locomotion are anticipated to be an advantage in obstacle-strewn scenarios characterizing urban disaster zones, subterranean collapses, and other natural environments. The elongated, laterally-narrow footprint associated with these motion strategies is well-suited to traversal of confined spaces and narrow pathways. Navigation and path planning in the absence of global sensing, however, remains a pivotal challenge to be addressed prior to practical deployment of these robotic mechanisms. Several challenges related to visual processing and localization need to be resolved to to enable navigation. As a first pass in this direction, we equip a wireless, monocular color camera to the head of a robotic snake. Visiual odometry and mapping from ORB-SLAM permits self-localization in planar, obstacle-strewn environments. Ground plane traversability segmentation in conjunction with perception-space collision detection permits path planning for navigation. A previously presented dynamical reduction of rectilinear snake locomotion to a non-holonomic kinematic vehicle informs both SLAM and planning. The simplified motion model is then applied to track planned trajectories through an obstacle configuration. This navigational framework enables a snake-like robotic platform to autonomously navigate and traverse unknown scenarios with only monocular vision.