 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotential Gap: Using Reactive Policies to Guarantee Safe Navigation
Paper and Code
Mar 21, 2021

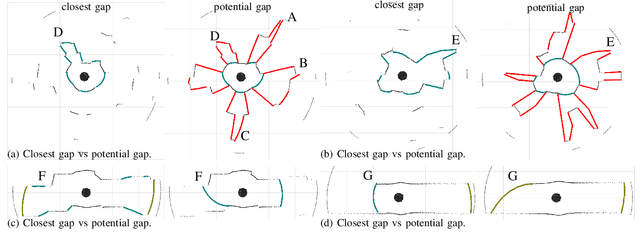
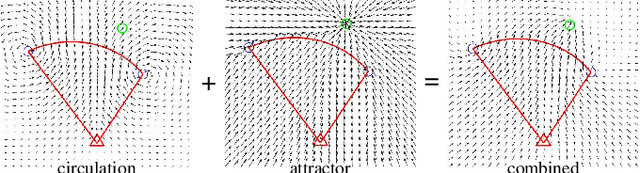
This paper considers the integration of gap-based local navigation methods with artificial potential field (APF) methods to derive a local planning module for hierarchical navigation systems that has provable collision-free properties. Given that APF theory applies to idealized robot models, the provable properties are lost when applied to more realistic models. We describe a set of algorithm modifications that correct for these errors and enhance robustness to non-ideal models. Central to the construction of the local planner is the use of sensory-derived local free-space models that detect gaps and use them for the synthesis of the APF. Modifications are given for a nonholonomic robot model. Integration of the local planner, called potential gap, into a hierarchical navigation system provides the local goals and trajectories needed for collision-free navigation through unknown environments. Monte Carlo experiments in benchmark worlds confirm the asserted safety and robustness properties by testing under various robot models.