 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Gap-based Planning in Dynamic Settings
Sep 08, 2025This chapter extends the family of perception-informed gap-based local planners to dynamic environments. Existing perception-informed local planners that operate in dynamic environments often rely on emergent or empirical robustness for collision avoidance as opposed to performing formal analysis of dynamic obstacles. This proposed planner, dynamic gap, explicitly addresses dynamic obstacles through several steps in the planning pipeline. First, polar regions of free space known as gaps are tracked and their dynamics are estimated in order to understand how the local environment evolves over time. Then, at planning time, gaps are propagated into the future through novel gap propagation algorithms to understand what regions are feasible for passage. Lastly, pursuit guidance theory is leveraged to generate local trajectories that are provably collision-free under ideal conditions. Additionally, obstacle-centric ungap processing is performed in situations where no gaps exist to robustify the overall planning framework. A set of gap-based planners are benchmarked against a series of classical and learned motion planners in dynamic environments, and dynamic gap is shown to outperform all other baselines in all environments. Furthermore, dynamic gap is deployed on a TurtleBot2 platform in several real-world experiments to validate collision avoidance behaviors.
Steppability-informed Quadrupedal Contact Planning through Deep Visual Search Heuristics
Dec 30, 2024



In this work, we introduce a method for predicting environment steppability -- the ability of a legged robot platform to place a foothold at a particular location in the local environment -- in the image space. This novel environment representation captures this critical geometric property of the local terrain while allowing us to exploit the computational benefits of sensing and planning in the image space. We adapt a primitive shapes-based synthetic data generation scheme to create geometrically rich and diverse simulation scenes and extract ground truth semantic information in order to train a steppability model. We then integrate this steppability model into an existing interleaved graph search and trajectory optimization-based footstep planner to demonstrate how this steppability paradigm can inform footstep planning in complex, unknown environments. We analyze the steppability model performance to demonstrate its validity, and we deploy the perception-informed footstep planner both in offline and online settings to experimentally verify planning performance.
OmniPose6D: Towards Short-Term Object Pose Tracking in Dynamic Scenes from Monocular RGB
Oct 09, 2024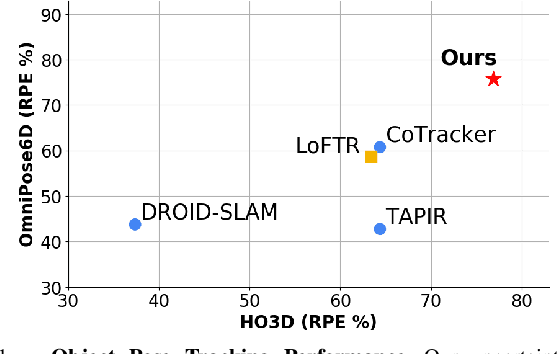
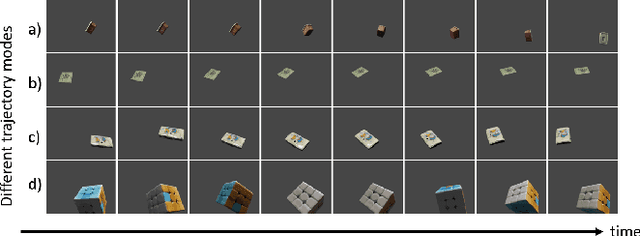
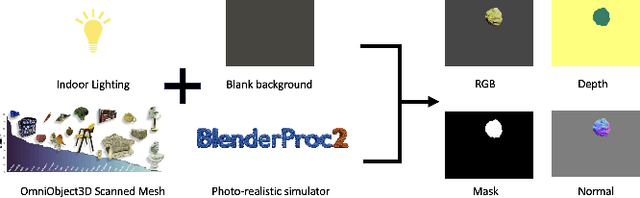
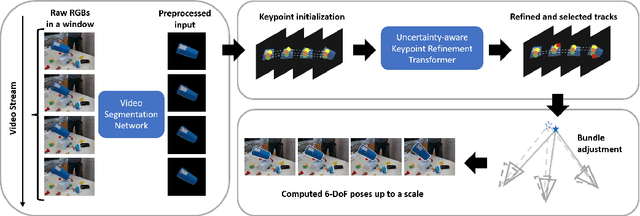
To address the challenge of short-term object pose tracking in dynamic environments with monocular RGB input, we introduce a large-scale synthetic dataset OmniPose6D, crafted to mirror the diversity of real-world conditions. We additionally present a benchmarking framework for a comprehensive comparison of pose tracking algorithms. We propose a pipeline featuring an uncertainty-aware keypoint refinement network, employing probabilistic modeling to refine pose estimation. Comparative evaluations demonstrate that our approach achieves performance superior to existing baselines on real datasets, underscoring the effectiveness of our synthetic dataset and refinement technique in enhancing tracking precision in dynamic contexts. Our contributions set a new precedent for the development and assessment of object pose tracking methodologies in complex scenes.
Task-driven SLAM Benchmarking
Sep 25, 2024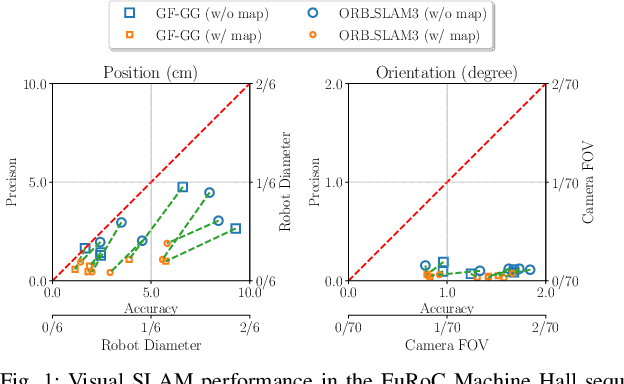
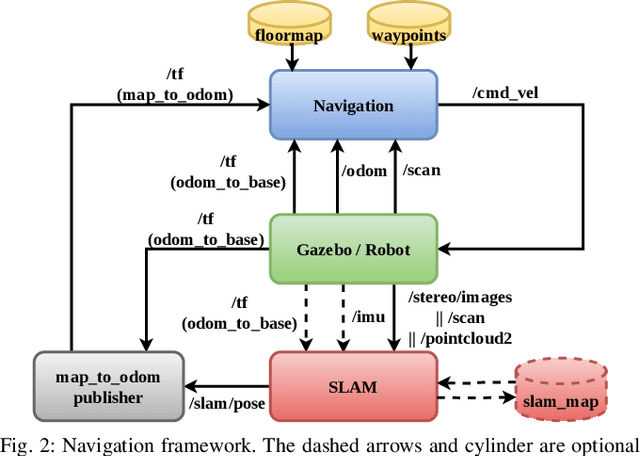
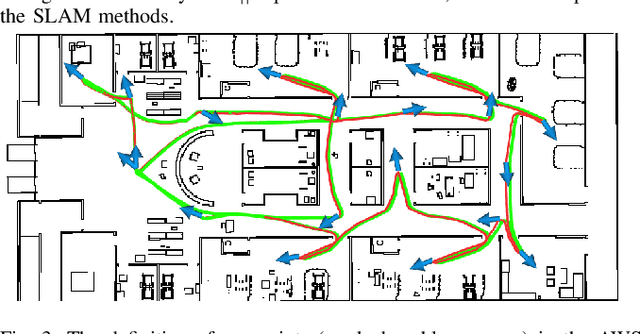
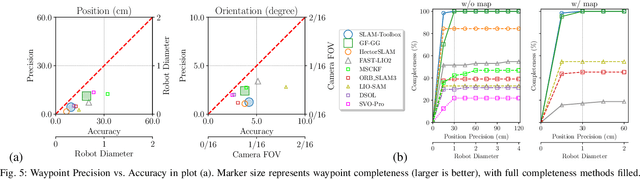
For assistive robots, one critical use case of SLAM is to support localization as they navigate through an environment completing tasks. Current SLAM benchmarks do not consider task-based deployments where repeatability (precision) is more critical than accuracy. To address this gap, we propose a task-driven benchmarking framework for evaluating SLAM methods. The framework accounts for SLAM's mapping capabilities, employs precision as a key metric, and has low resource requirements to implement. Testing of state-of-the-art SLAM methods in both simulated and real-world scenarios provides insights into the performance properties of modern SLAM solutions. In particular, it shows that passive stereo SLAM operates at a level of precision comparable to LiDAR-based SLAM in typical indoor environments. The benchmarking approach offers a more relevant and accurate assessment of SLAM performance in task-driven applications.
Hierarchical Experience-informed Navigation for Multi-modal Quadrupedal Rebar Grid Traversal
Nov 14, 2023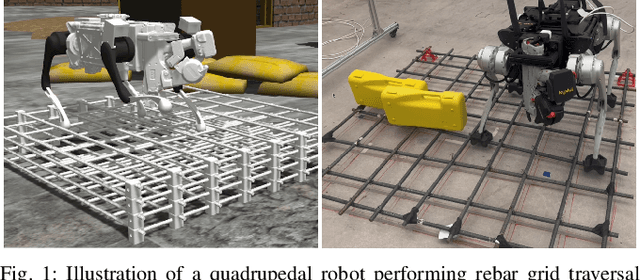
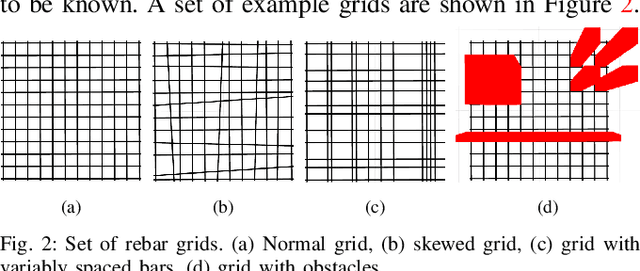
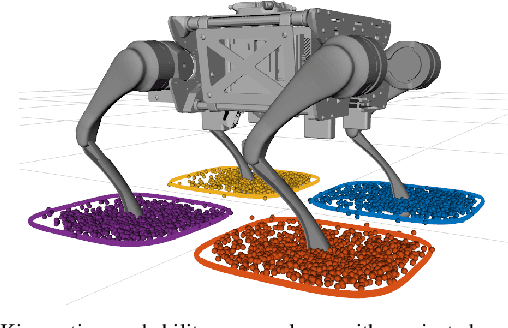
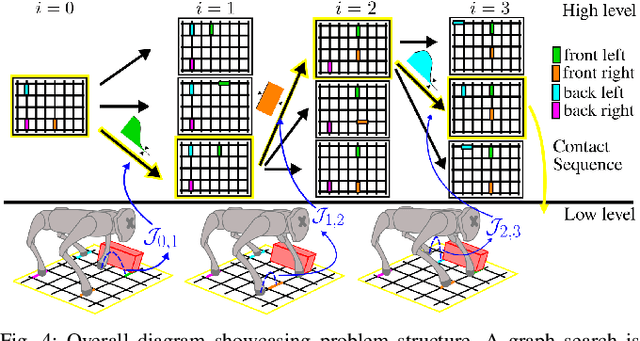
This study focuses on a layered, experience-based, multi-modal contact planning framework for agile quadrupedal locomotion over a constrained rebar environment. To this end, our hierarchical planner incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner. Through quantitative analysis of the experience accumulation process and experimental validation of the kinodynamic feasibility of the generated locomotion trajectories, we demonstrate that the experience planning heuristic offers an effective way of providing candidate footholds for a legged contact planner. Additionally, we introduce a guiding torso path heuristic at the global planning level to enhance the navigation success rate in the presence of environmental obstacles. Our results indicate that the torso-path guided experience accumulation requires significantly fewer offline trials to successfully reach the goal compared to regular experience accumulation. Finally, our planning framework is validated in both dynamics simulations and real hardware implementations on a quadrupedal robot provided by Skymul Inc.
Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)
Jul 31, 2023



The adaptability of soft robots makes them ideal candidates to maneuver through unstructured environments. However, locomotion challenges arise due to complexities in modeling the body mechanics, actuation, and robot-environment dynamics. These factors contribute to the gap between their potential and actual autonomous field deployment. A closed-loop path planning framework for soft robot locomotion is critical to close the real-world realization gap. This paper presents a generic path planning framework applied to TerreSoRo (Tetra-Limb Terrestrial Soft Robot) with pose feedback. It employs a gait-based, lattice trajectory planner to facilitate navigation in the presence of obstacles. The locomotion gaits are synthesized using a data-driven optimization approach that allows for learning from the environment. The trajectory planner employs a greedy breadth-first search strategy to obtain a collision-free trajectory. The synthesized trajectory is a sequence of rotate-then-translate gait pairs. The control architecture integrates high-level and low-level controllers with real-time localization (using an overhead webcam). TerreSoRo successfully navigates environments with obstacles where path re-planning is performed. To best of our knowledge, this is the first instance of real-time, closed-loop path planning of a non-pneumatic soft robot.
Planning with Sequence Models through Iterative Energy Minimization
Mar 28, 2023Recent works have shown that sequence modeling can be effectively used to train reinforcement learning (RL) policies. However, the success of applying existing sequence models to planning, in which we wish to obtain a trajectory of actions to reach some goal, is less straightforward. The typical autoregressive generation procedures of sequence models preclude sequential refinement of earlier steps, which limits the effectiveness of a predicted plan. In this paper, we suggest an approach towards integrating planning with sequence models based on the idea of iterative energy minimization, and illustrate how such a procedure leads to improved RL performance across different tasks. We train a masked language model to capture an implicit energy function over trajectories of actions, and formulate planning as finding a trajectory of actions with minimum energy. We illustrate how this procedure enables improved performance over recent approaches across BabyAI and Atari environments. We further demonstrate unique benefits of our iterative optimization procedure, involving new task generalization, test-time constraints adaptation, and the ability to compose plans together. Project website: https://hychen-naza.github.io/projects/LEAP
Safe Hierarchical Navigation in Crowded Dynamic Uncertain Environments
Mar 24, 2023
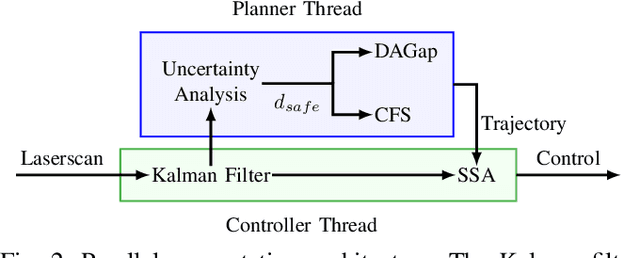


This paper describes a hierarchical solution consisting of a multi-phase planner and a low-level safe controller to jointly solve the safe navigation problem in crowded, dynamic, and uncertain environments. The planner employs dynamic gap analysis and trajectory optimization to achieve collision avoidance with respect to the predicted trajectories of dynamic agents within the sensing and planning horizon and with robustness to agent uncertainty. To address uncertainty over the planning horizon and real-time safety, a fast reactive safe set algorithm (SSA) is adopted, which monitors and modifies the unsafe control during trajectory tracking. Compared to other existing methods, our approach offers theoretical guarantees of safety and achieves collision-free navigation with higher probability in uncertain environments, as demonstrated in scenarios with 20 and 50 dynamic agents. Project website: https://hychen-naza.github.io/projects/HDAGap/.
WDiscOOD: Out-of-Distribution Detection via Whitened Linear Discriminant Analysis
Mar 22, 2023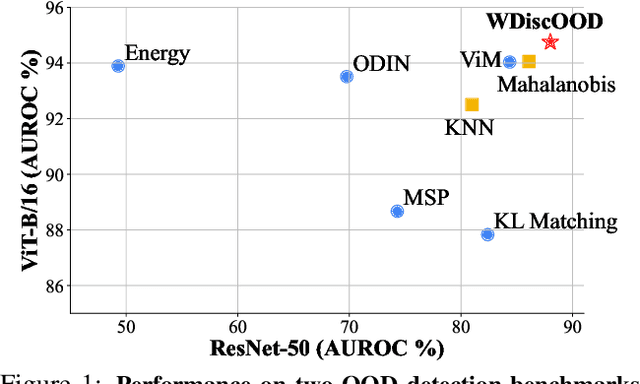
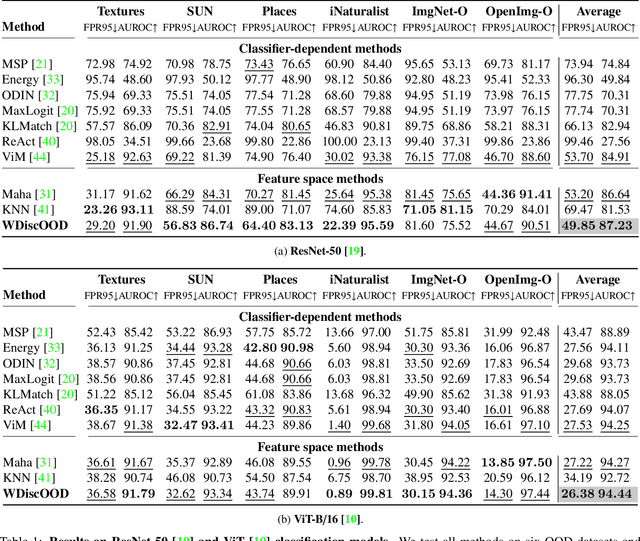
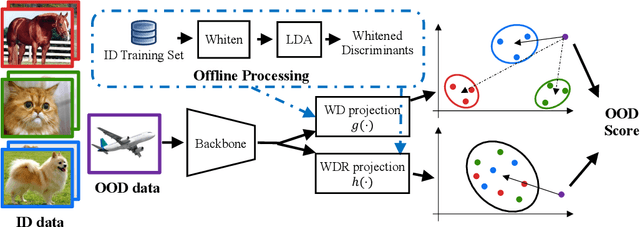
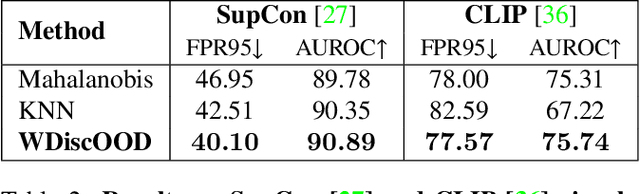
Deep neural networks are susceptible to generating overconfident yet erroneous predictions when presented with data beyond known concepts. This challenge underscores the importance of detecting out-of-distribution (OOD) samples in the open world. In this work, we propose a novel feature-space OOD detection score that jointly reasons with both class-specific and class-agnostic information. Specifically, our approach utilizes Whitened Linear Discriminant Analysis to project features into two subspaces - the discriminative and residual subspaces - in which the ID classes are maximally separated and closely clustered, respectively. The OOD score is then determined by combining the deviation from the input data to the ID distribution in both subspaces. The efficacy of our method, named WDiscOOD, is verified on the large-scale ImageNet-1k benchmark, with six OOD datasets that covers a variety of distribution shifts. WDiscOOD demonstrates superior performance on deep classifiers with diverse backbone architectures, including CNN and vision transformer. Furthermore, we also show that our method can more effectively detect novel concepts in representation space trained with contrastive objectives, including supervised contrastive loss and multi-modality contrastive loss.
KGNv2: Separating Scale and Pose Prediction for Keypoint-based 6-DoF Grasp Synthesis on RGB-D input
Mar 16, 2023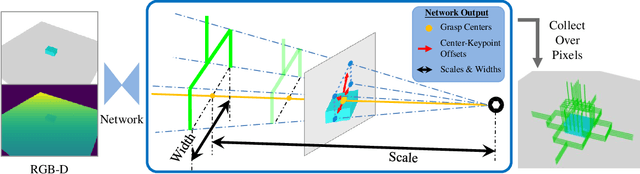
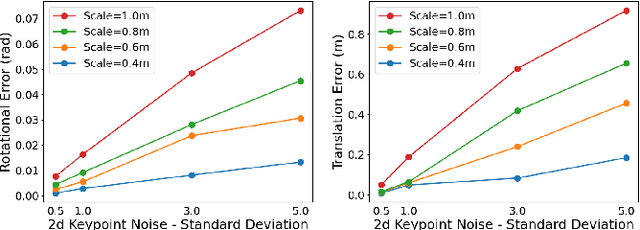
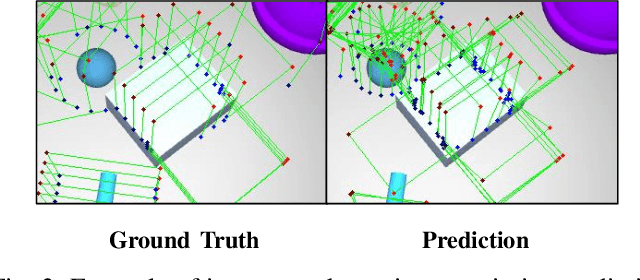
We propose a new 6-DoF grasp pose synthesis approach from 2D/2.5D input based on keypoints. Keypoint-based grasp detector from image input has demonstrated promising results in the previous study, where the additional visual information provided by color images compensates for the noisy depth perception. However, it relies heavily on accurately predicting the location of keypoints in the image space. In this paper, we devise a new grasp generation network that reduces the dependency on precise keypoint estimation. Given an RGB-D input, our network estimates both the grasp pose from keypoint detection as well as scale towards the camera. We further re-design the keypoint output space in order to mitigate the negative impact of keypoint prediction noise to Perspective-n-Point (PnP) algorithm. Experiments show that the proposed method outperforms the baseline by a large margin, validating the efficacy of our approach. Finally, despite trained on simple synthetic objects, our method demonstrate sim-to-real capacity by showing competitive results in real-world robot experiments.