 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment-Centric Learning Approach for Gait Synthesis in Terrestrial Soft Robots
Feb 06, 2024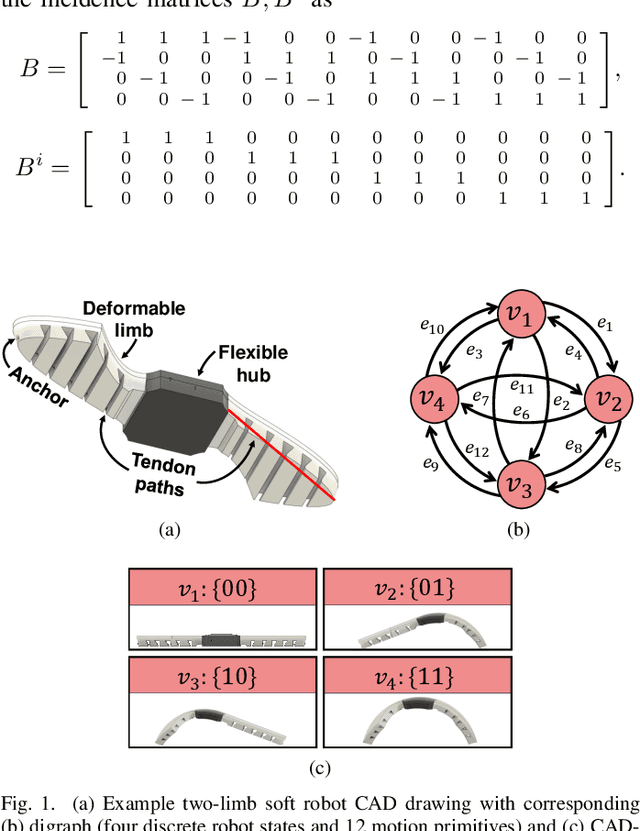

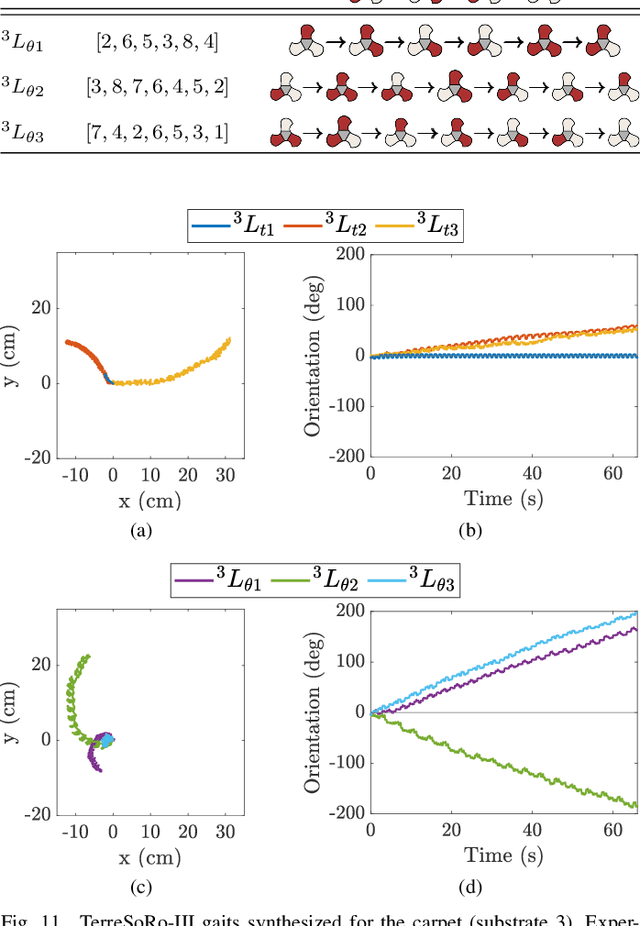
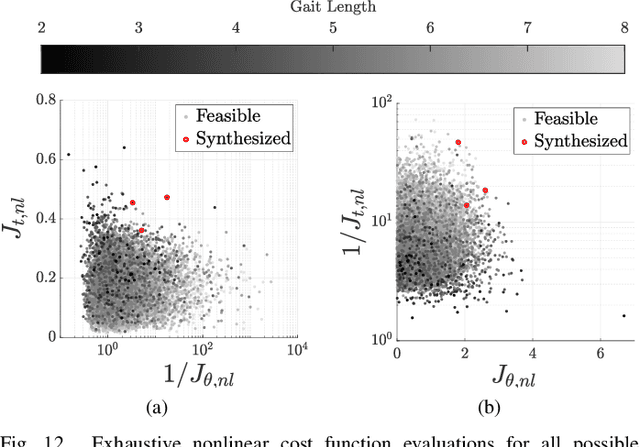
Locomotion gaits are fundamental for control of soft terrestrial robots. However, synthesis of these gaits is challenging due to modeling of robot-environment interaction and lack of a mathematical framework. This work presents an environment-centric, data-driven and fault-tolerant probabilistic Model-Free Control (pMFC) framework that allows for soft multi-limb robots to learn from their environment and synthesize diverse sets of locomotion gaits for realizing open-loop control. Here, discretization of factors dominating robot-environment interactions enables an environment-specific graphical representation where the edges encode experimental locomotion data corresponding to the robot motion primitives. In this graph, locomotion gaits are defined as simple cycles that are transformation invariant, i.e., the locomotion is independent of the starting vertex of these periodic cycles. Gait synthesis, the problem of finding optimal locomotion gaits for a given substrate, is formulated as Binary Integer Linear Programming (BILP) problems with a linearized cost function, linear constraints, and iterative simple cycle detection. Experimentally, gaits are synthesized for varying robot-environment interactions. Variables include robot morphology - three-limb and four-limb robots, TerreSoRo-III and TerreSoRo-IV; substrate - rubber mat, whiteboard and carpet; and actuator functionality - simulated loss of robot limb actuation. On an average, gait synthesis improves the translation and rotation speeds by 82% and 97% respectively. The results highlight that data-driven methods are vital to soft robot locomotion control due to the significant influence of unexpected asymmetries in the system and the dependence of optimal gait sequences on the experimental robot-environment interaction.
Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)
Jul 31, 2023



The adaptability of soft robots makes them ideal candidates to maneuver through unstructured environments. However, locomotion challenges arise due to complexities in modeling the body mechanics, actuation, and robot-environment dynamics. These factors contribute to the gap between their potential and actual autonomous field deployment. A closed-loop path planning framework for soft robot locomotion is critical to close the real-world realization gap. This paper presents a generic path planning framework applied to TerreSoRo (Tetra-Limb Terrestrial Soft Robot) with pose feedback. It employs a gait-based, lattice trajectory planner to facilitate navigation in the presence of obstacles. The locomotion gaits are synthesized using a data-driven optimization approach that allows for learning from the environment. The trajectory planner employs a greedy breadth-first search strategy to obtain a collision-free trajectory. The synthesized trajectory is a sequence of rotate-then-translate gait pairs. The control architecture integrates high-level and low-level controllers with real-time localization (using an overhead webcam). TerreSoRo successfully navigates environments with obstacles where path re-planning is performed. To best of our knowledge, this is the first instance of real-time, closed-loop path planning of a non-pneumatic soft robot.