 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Rolling Gets Weird: A Curved-Link Tensegrity Robot for Non-Intuitive Behavior
Mar 17, 2026Conventional mobile tensegrity robots constructed with straight links offer mobility at the cost of locomotion speed. While spherical robots provide highly effective rolling behavior, they often lack the stability required for navigating unstructured terrain common in many space exploration environments. This research presents a solution with a semi-circular, curved-link tensegrity robot that strikes a balance between efficient rolling locomotion and controlled stability, enabled by discontinuities present at the arc endpoints. Building upon an existing geometric static modeling framework [1], this work presents the system design of an improved Tensegrity eXploratory Robot 2 (TeXploR2). Internal shifting masses instantaneously roll along each curved-link, dynamically altering the two points of contact with the ground plane. Simulations of quasistatic, piecewise continuous locomotion sequences reveal new insights into the positional displacement between inertial and body frames. Non-intuitive rolling behaviors are identified and experimentally validated using a tetherless prototype, demonstrating successful dynamic locomotion. A preliminary impact test highlights the tensegrity structure's inherent shock absorption capabilities and conformability. Future work will focus on finalizing a dynamic model that is experimentally validated with extended testing in real-world environments as well as further refinement of the prototype to incorporate additional curved-links and subsequent ground contact points for increased controllability.
Improving Grip Stability Using Passive Compliant Microspine Arrays for Soft Robots in Unstructured Terrain
Feb 17, 2025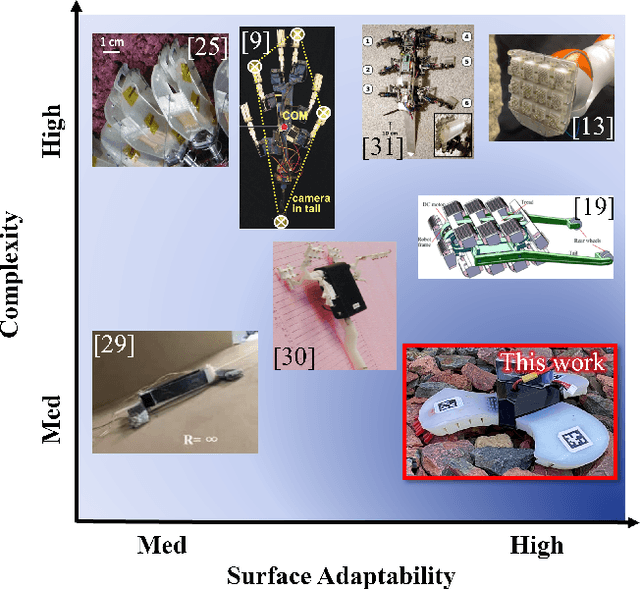

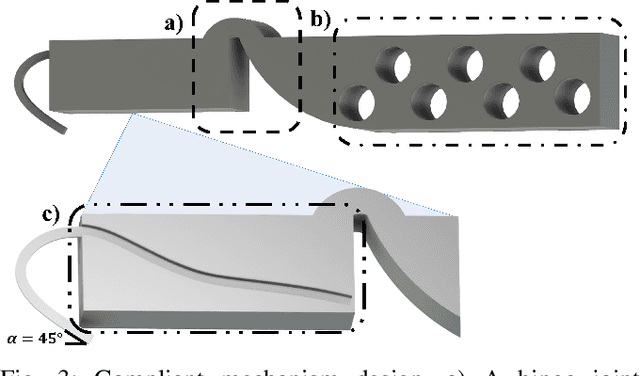
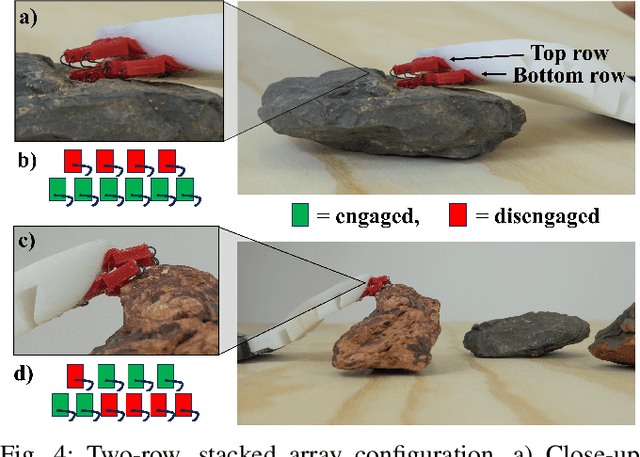
Microspine grippers are small spines commonly found on insect legs that reinforce surface interaction by engaging with asperities to increase shear force and traction. An array of such microspines, when integrated into the limbs or undercarriage of a robot, can provide the ability to maneuver uneven terrains, traverse inclines, and even climb walls. Conformability and adaptability of soft robots makes them ideal candidates for these applications involving traversal of complex, unstructured terrains. However, there remains a real-life realization gap for soft locomotors pertaining to their transition from controlled lab environment to the field by improving grip stability through effective integration of microspines. We propose a passive, compliant microspine stacked array design to enhance the locomotion capabilities of mobile soft robots, in our case, ones that are motor tendon actuated. We offer a standardized microspine array integration method with effective soft-compliant stiffness integration, and reduced complexity resulting from a single actuator passively controlling them. The presented design utilizes a two-row, stacked microspine array configuration that offers additional gripping capabilities on extremely steep/irregular surfaces from the top row while not hindering the effectiveness of the more frequently active bottom row. We explore different configurations of the microspine array to account for changing surface topologies and enable independent, adaptable gripping of asperities per microspine. Field test experiments are conducted on various rough surfaces including concrete, brick, compact sand, and tree roots with three robots consisting of a baseline without microspines compared against two robots with different combinations of microspine arrays. Tracking results indicate that the inclusion of microspine arrays increases planar displacement on average by 15 and 8 times.
Geometric Static Modeling Framework for Piecewise-Continuous Curved-Link Multi Point-of-Contact Tensegrity Robots
Jul 02, 2024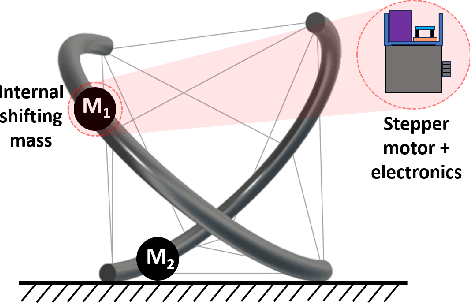
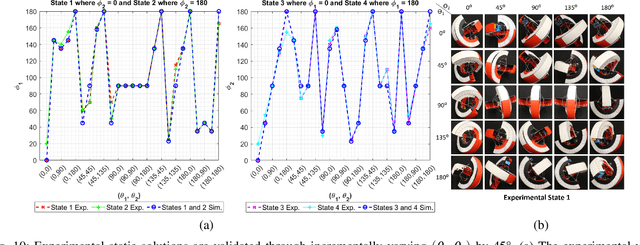
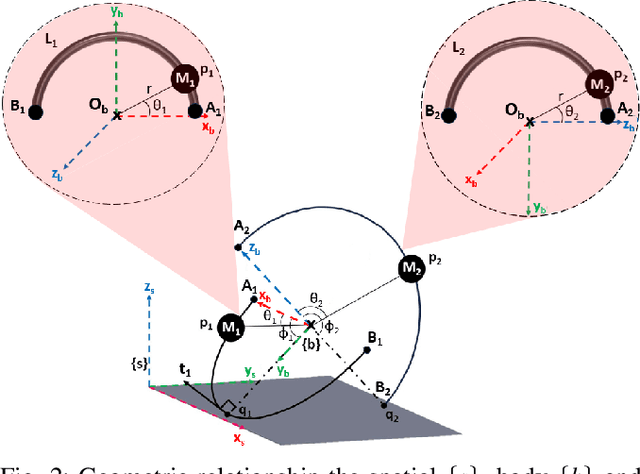
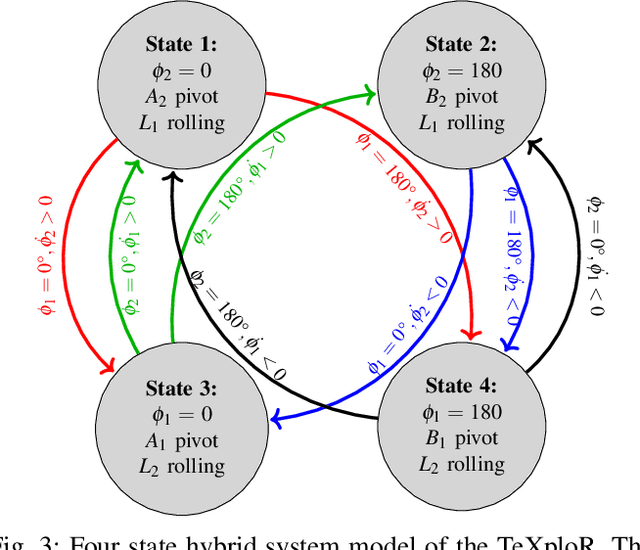
Tensegrities synergistically combine tensile (cable) and rigid (link) elements to achieve structural integrity, making them lightweight, packable, and impact resistant. Consequently, they have high potential for locomotion in unstructured environments. This research presents geometric modeling of a Tensegrity eXploratory Robot (TeXploR) comprised of two semi-circular, curved links held together by 12 prestressed cables and actuated with an internal mass shifting along each link. This design allows for efficient rolling with stability (e.g., tip-over on an incline). However, the unique design poses static and dynamic modeling challenges given the discontinuous nature of the semi-circular, curved links, two changing points of contact with the surface plane, and instantaneous movement of the masses along the links. The robot is modeled using a geometric approach where the holonomic constraints confirm the experimentally observed four-state hybrid system, proving TeXploR rolls along one link while pivoting about the end of the other. It also identifies the quasi-static state transition boundaries that enable a continuous change in the robot states via internal mass shifting. This is the first time in literature a non-spherical two-point contact system is kinematically and geometrically modeled. Furthermore, the static solutions are closed-form and do not require numerical exploration of the solution. The MATLAB simulations are experimentally validated on a tetherless prototype with mean absolute error of 4.36{\deg}.
Environment-Centric Learning Approach for Gait Synthesis in Terrestrial Soft Robots
Feb 06, 2024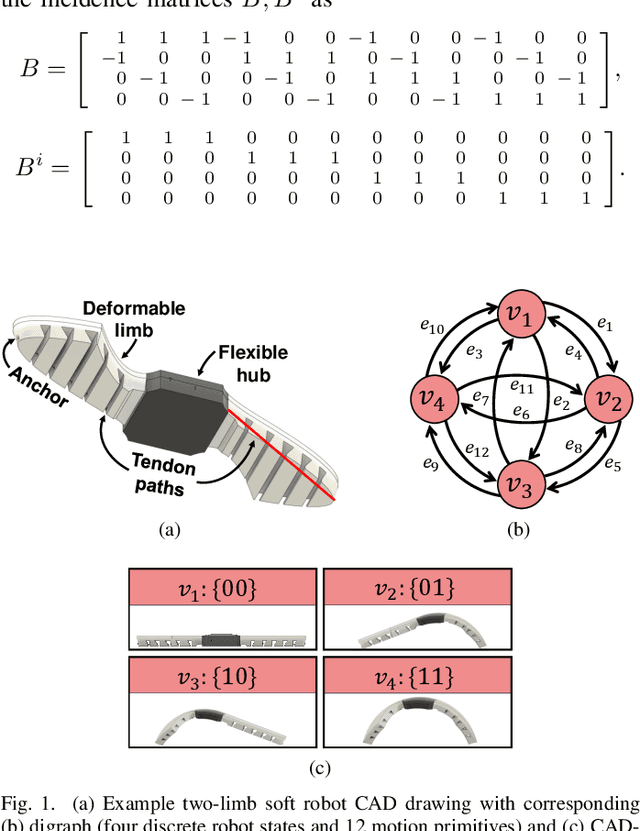

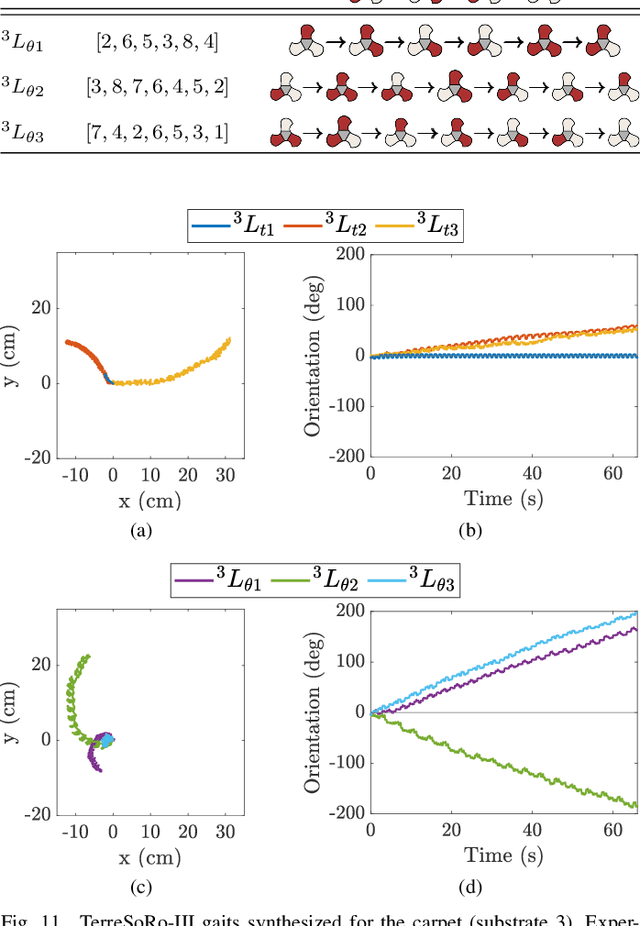
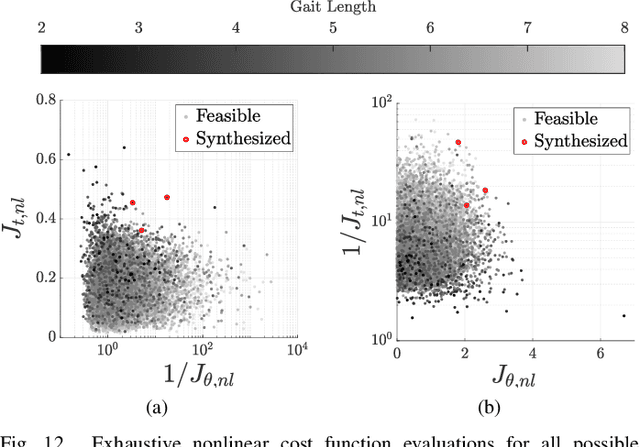
Locomotion gaits are fundamental for control of soft terrestrial robots. However, synthesis of these gaits is challenging due to modeling of robot-environment interaction and lack of a mathematical framework. This work presents an environment-centric, data-driven and fault-tolerant probabilistic Model-Free Control (pMFC) framework that allows for soft multi-limb robots to learn from their environment and synthesize diverse sets of locomotion gaits for realizing open-loop control. Here, discretization of factors dominating robot-environment interactions enables an environment-specific graphical representation where the edges encode experimental locomotion data corresponding to the robot motion primitives. In this graph, locomotion gaits are defined as simple cycles that are transformation invariant, i.e., the locomotion is independent of the starting vertex of these periodic cycles. Gait synthesis, the problem of finding optimal locomotion gaits for a given substrate, is formulated as Binary Integer Linear Programming (BILP) problems with a linearized cost function, linear constraints, and iterative simple cycle detection. Experimentally, gaits are synthesized for varying robot-environment interactions. Variables include robot morphology - three-limb and four-limb robots, TerreSoRo-III and TerreSoRo-IV; substrate - rubber mat, whiteboard and carpet; and actuator functionality - simulated loss of robot limb actuation. On an average, gait synthesis improves the translation and rotation speeds by 82% and 97% respectively. The results highlight that data-driven methods are vital to soft robot locomotion control due to the significant influence of unexpected asymmetries in the system and the dependence of optimal gait sequences on the experimental robot-environment interaction.
Multi-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)
Jul 31, 2023



The adaptability of soft robots makes them ideal candidates to maneuver through unstructured environments. However, locomotion challenges arise due to complexities in modeling the body mechanics, actuation, and robot-environment dynamics. These factors contribute to the gap between their potential and actual autonomous field deployment. A closed-loop path planning framework for soft robot locomotion is critical to close the real-world realization gap. This paper presents a generic path planning framework applied to TerreSoRo (Tetra-Limb Terrestrial Soft Robot) with pose feedback. It employs a gait-based, lattice trajectory planner to facilitate navigation in the presence of obstacles. The locomotion gaits are synthesized using a data-driven optimization approach that allows for learning from the environment. The trajectory planner employs a greedy breadth-first search strategy to obtain a collision-free trajectory. The synthesized trajectory is a sequence of rotate-then-translate gait pairs. The control architecture integrates high-level and low-level controllers with real-time localization (using an overhead webcam). TerreSoRo successfully navigates environments with obstacles where path re-planning is performed. To best of our knowledge, this is the first instance of real-time, closed-loop path planning of a non-pneumatic soft robot.
Topology and morphology design of spherically reconfigurable homogeneous Modular Soft Robots (MSoRos)
May 01, 2022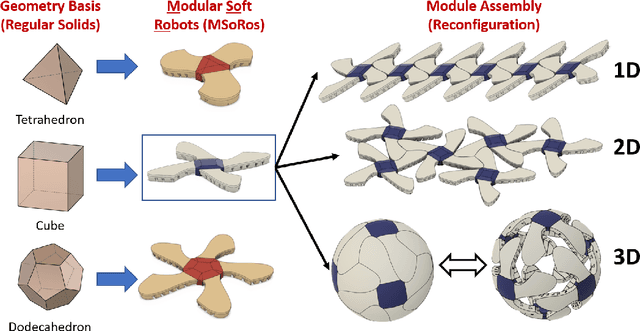
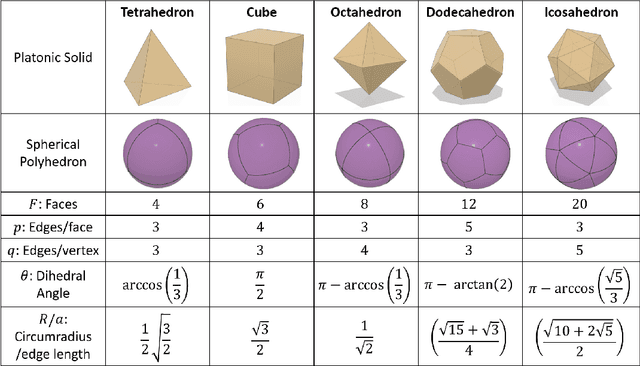
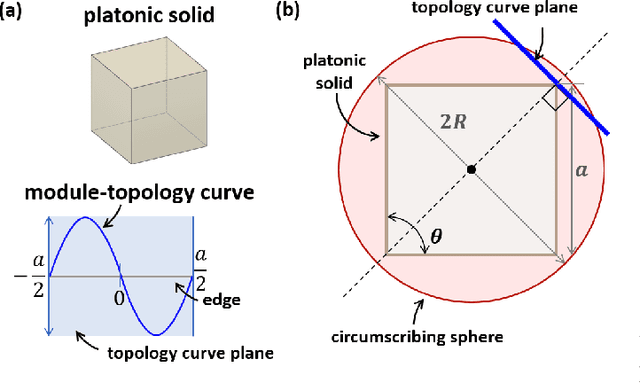
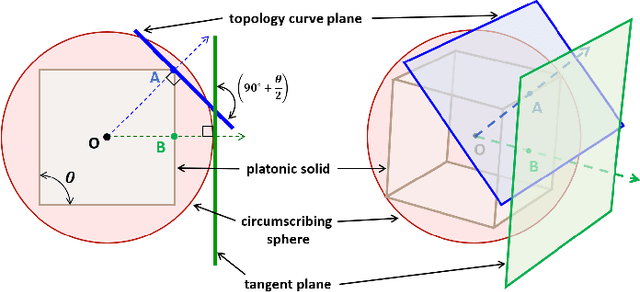
Imagine a swarm of terrestrial robots that can explore an environment, and, upon completion of this task, reconfigure into a spherical ball and roll out. This dimensional change alters the dynamics of locomotion and can assist them to maneuver variable terrains. The sphere-plane reconfiguration is equivalent to projecting a spherical shell onto a plane, an operation which is not possible without distortions. Fortunately, soft materials have potential to adapt to this disparity of the Gaussian curvatures. Modular Soft Robots (MSoRos) have promise of achieving dimensional change by exploiting their continuum and deformable nature. We present topology and morphology design of MSoRos capable of reconfiguring between spherical and planar configurations. Our approach is based in geometry, where a platonic solid determines the number of modules required for plane-to-sphere reconfiguration and the radius of the resulting sphere, e.g., four `tetrahedron-based' or six `cube-based' MSoRos are required for spherical reconfiguration. The methodology involves: (1)inverse orthographic projection of a `module-topology curve' onto the circumscribing sphere to generate the spherical topology,(2)azimuthal projection of the spherical topology onto a tangent plane at the center of the module resulting in the planar topology, and (3)adjusting the limb stiffness and curling ability by manipulating the geometry of cavities to realize a physical finite-width, Motor-Tendon Actuated MSoRo. The topology design is shown to be scale invariant, i.e., scaling of base platonic solid is reflected linearly in spherical and planar topologies. The module-topology curve is optimized for the reconfiguration and locomotion ability using a metric that quantifies sphere-to-plane distortion. The geometry of the cavity optimizes for the limb stiffness and curling ability without compromising the actuator's structural integrity.
Angular Velocity Estimation using Non-coplanar Accelerometer Array
Aug 22, 2021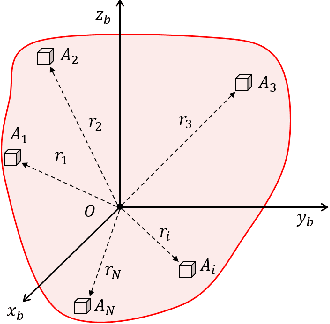
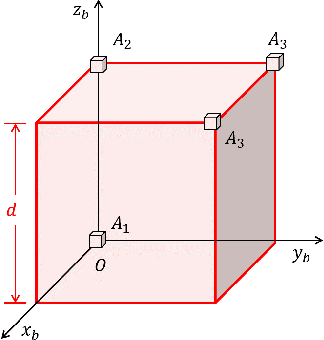
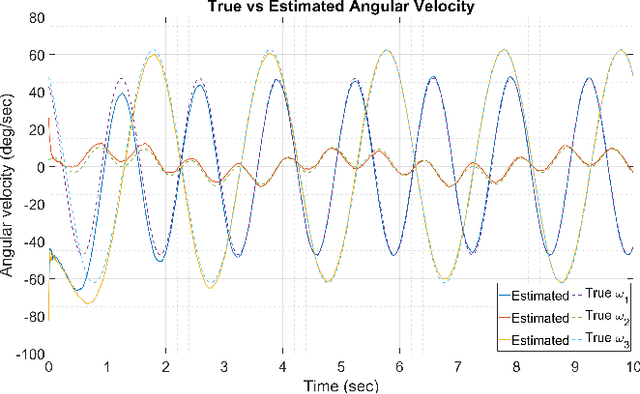
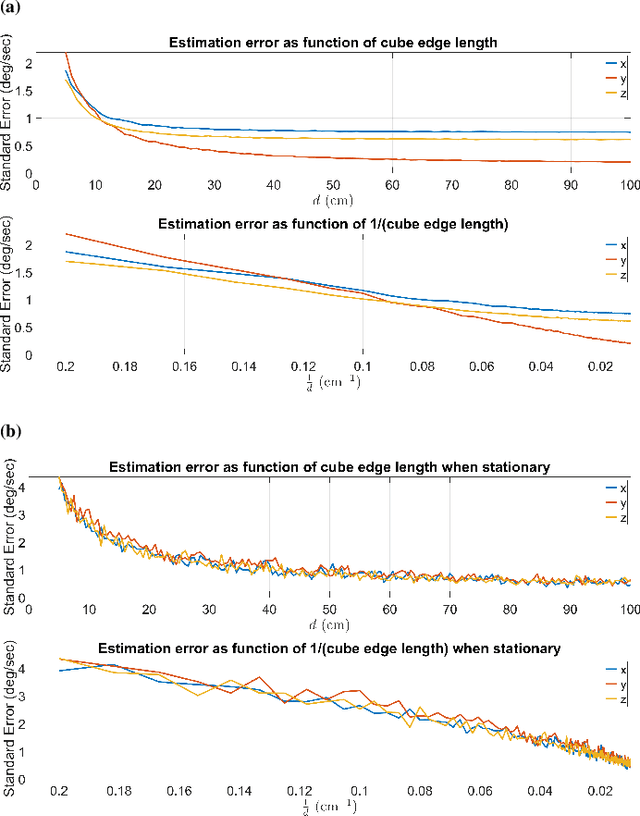
Over the last few decades, Gyro-Free IMUs have been extensively researched to overcome the limitations of gyroscopes. This research presents a Non-coplanar Accelerometer Array (NAA) for estimating angular velocity with non-specific geometric arrangement of four or more triaxial accelerometers with non-coplanarity constraint. The presented proof of non-coplanar spacial arrangement also provides insights into propagation of the sensor noise and construction of the noise covariance matrices. The system noise depends on the singular values of the relative displacement matrix (between the sensors). A dynamical system model with uncorrelated process and measurement noise is proposed where the accelerometer readings are used simultaneously as process and measurement inputs. The angular velocity is estimated using an EKF that discretizes and linearizes the continuous-discrete time dynamical system. The simulations are performed on a Cube-NAA (Cu-NAA) comprising four accelerometers placed at different vertices of a cube. They analyze the estimation error for static and dynamic movement as the distance between the accelerometers is varied. Here, the system noise is observed to decrease inversely with the length of the cube edge as the arrangement is kept identical. Consequently, the simulation results indicate asymptotic decrease in the standard error of estimation with edge length. The experiments are conducted on a Cu-NAA with five reflective optical markers. The reflective markers are visually tracked using VICON to construct the ground truth. This unique experimental setup, apart from providing three degrees of rotational freedom of movement, also allows for three degrees of spacial translation (linear acceleration of the Cu-NAA in space). The simulation and experimental results indicate better performance of the proposed EKF as compared to one with correlated process and measurement noises.
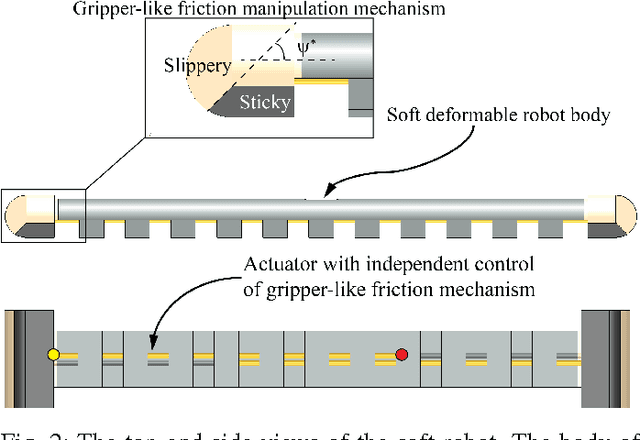
Design and locomotion control of soft robot using friction manipulation and motor-tendon actuation
May 12, 2016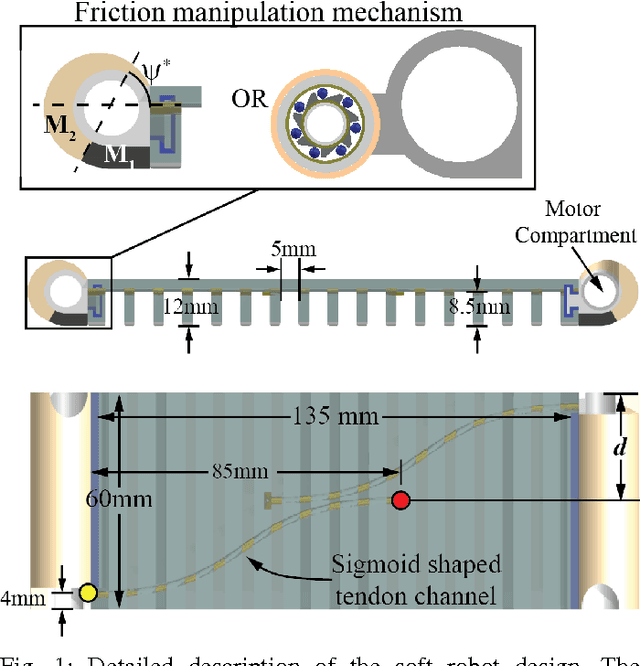
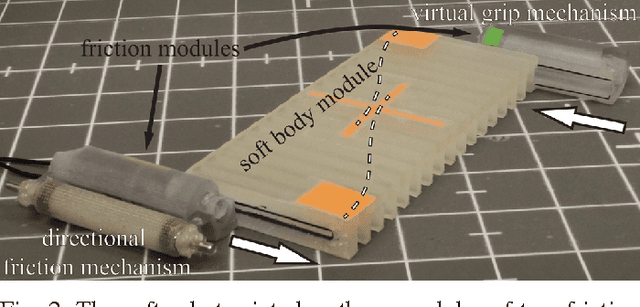
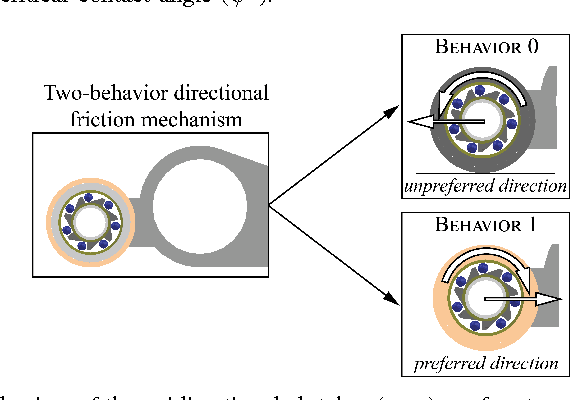
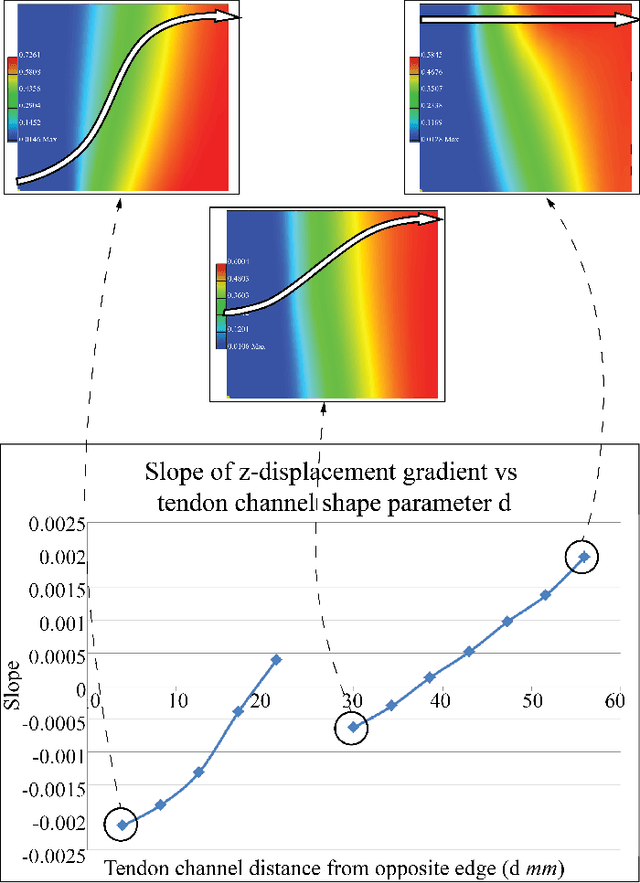
Robots built from soft materials can alter their shape and size in a particular profile. This shape-changing ability could be extremely helpful for rescue robots and those operating in unknown terrains and environments. In changing shape, soft materials also store and release elastic energy, a feature that can be exploited for effective robot movement. However, design and control of these moving soft robots are non-trivial. The research presents design methodology for a 3D-printed, motor-tendon actuated soft robot capable of locomotion. In addition to shape change, the robot uses friction manipulation mechanisms to effect locomotion. The motor-tendon actuators comprise of nylon tendons embedded inside the soft body structure along a given path with one end fixed on the body and the other attached to a motor. These actuators directly control the deformation of the soft body which influences the robot locomotion behavior. Static stress analysis is used as a tool for designing the shape of the paths of these tendons embedded inside the body. The research also presents a novel model-free learning-based control approach for soft robots which interact with the environment at discrete contact points. This approach involves discretization of factors dominating robot-environment interactions as states, learning of the results as robot transitions between these robot states and evaluation of desired periodic state control sequences optimizing a cost function corresponding to a locomotion task (rotation or translation). The clever discretization allows the framework to exist in robot's task space, hence, facilitating calculation of control sequences without modeling the actuator, body material or details of the friction mechanisms. The flexibility of the framework is experimentally explored by applying it to robots with different friction mechanisms and different shapes of tendon paths.
Design and control of a soft, shape-changing, crawling robot
Sep 24, 2015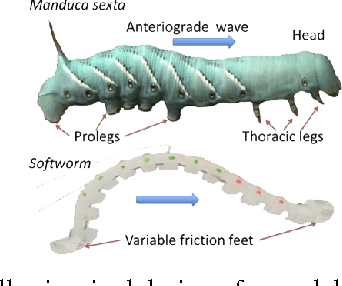
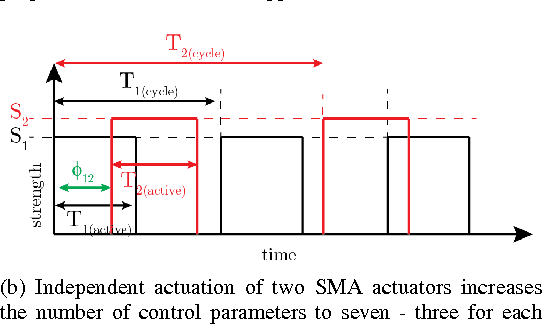
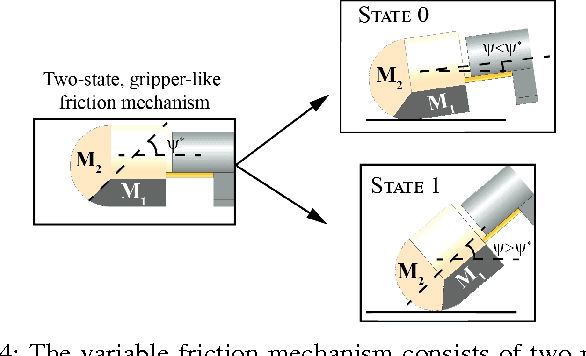
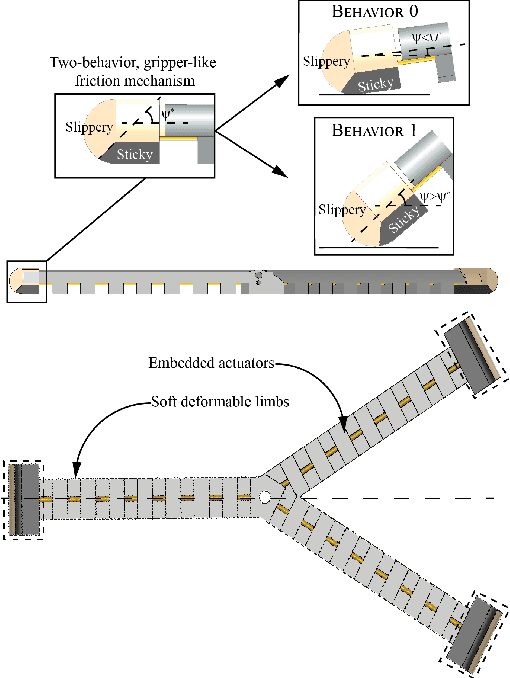
Soft materials have many important roles in animal locomotion and object manipulation. In robotic applications soft materials can store and release energy, absorb impacts, increase compliance and increase the range of possible shape profiles using minimal actuators. The shape changing ability is also a potential tool to manipulate friction forces caused by contact with the environment. These advantages are accompanied by challenges of soft material actuation and the need to exploit frictional interactions to generate locomotion. Accordingly, the design of soft robots involves exploitation of continuum properties of soft materials for manipulating frictional interactions that result in robot locomotion. The research presents design and control of a soft body robot that uses its shape change capability for locomotion. The bioinspired (caterpillar) modular robot design is a soft monolithic body which interacts with the environment at discrete contact points (caterpillar prolegs). The deformable body is actuated by muscle-like shape memory alloy coils and the discrete contact points manipulate friction in a binary manner. This novel virtual grip mechanism combines two materials with different coefficients of frictions (sticky-slippery) to control the robot-environment friction interactions. The research also introduces a novel control concept that discretizes the robot-environment-friction interaction into binary states. This facilitates formulation of a control framework that is independent of the specific actuator or soft material properties and can be applied to multi-limbed soft robots. The transitions between individual robot states are assigned a reward that allow optimized state transition control sequences to be calculated. This conceptual framework is extremely versatile and we show how it can be applied to situations in which the robot loses limb function.
Model-free control framework for multi-limb soft robots
Sep 19, 2015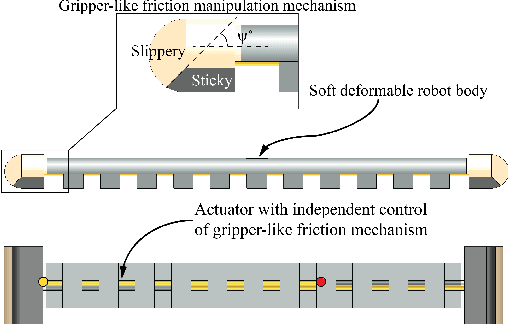
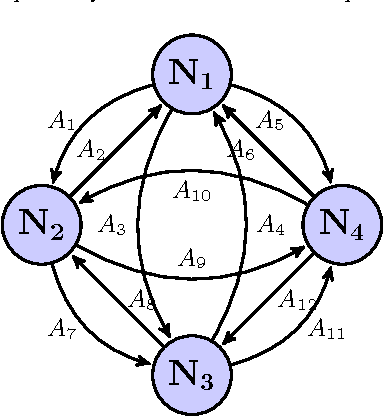

The deformable and continuum nature of soft robots promises versatility and adaptability. However, control of modular, multi-limbed soft robots for terrestrial locomotion is challenging due to the complex robot structure, actuator mechanics and robot-environment interaction. Traditionally, soft robot control is performed by modeling kinematics using exact geometric equations and finite element analysis. The research presents an alternative, model-free, data-driven, reinforcement learning inspired approach, for controlling multi-limbed soft material robots. This control approach can be summarized as a four-step process of discretization, visualization, learning and optimization. The first step involves identification and subsequent discretization of key factors that dominate robot-environment, in turn, the robot control. Graph theory is used to visualize relationships and transitions between the discretized states. The graph representation facilitates mathematical definition of periodic control patterns (simple cycles) and locomotion gaits. Rewards corresponding to individual arcs of the graph are weighted displacement and orientation change for robot state-to-state transitions. These rewards are specific to surface of locomotion and are learned. Finally, the control patterns result from optimization of reward dependent locomotion task (e.g. translation) cost function. The optimization problem is an Integer Linear Programming problem which can be quickly solved using standard solvers. The framework is generic and independent of type of actuator, soft material properties or the type of friction mechanism, as the control exists in the robot's task space. Furthermore, the data-driven nature of the framework imparts adaptability to the framework toward different locomotion surfaces by re-learning rewards.