 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Rolling Gets Weird: A Curved-Link Tensegrity Robot for Non-Intuitive Behavior
Mar 17, 2026Conventional mobile tensegrity robots constructed with straight links offer mobility at the cost of locomotion speed. While spherical robots provide highly effective rolling behavior, they often lack the stability required for navigating unstructured terrain common in many space exploration environments. This research presents a solution with a semi-circular, curved-link tensegrity robot that strikes a balance between efficient rolling locomotion and controlled stability, enabled by discontinuities present at the arc endpoints. Building upon an existing geometric static modeling framework [1], this work presents the system design of an improved Tensegrity eXploratory Robot 2 (TeXploR2). Internal shifting masses instantaneously roll along each curved-link, dynamically altering the two points of contact with the ground plane. Simulations of quasistatic, piecewise continuous locomotion sequences reveal new insights into the positional displacement between inertial and body frames. Non-intuitive rolling behaviors are identified and experimentally validated using a tetherless prototype, demonstrating successful dynamic locomotion. A preliminary impact test highlights the tensegrity structure's inherent shock absorption capabilities and conformability. Future work will focus on finalizing a dynamic model that is experimentally validated with extended testing in real-world environments as well as further refinement of the prototype to incorporate additional curved-links and subsequent ground contact points for increased controllability.
Improving Grip Stability Using Passive Compliant Microspine Arrays for Soft Robots in Unstructured Terrain
Feb 17, 2025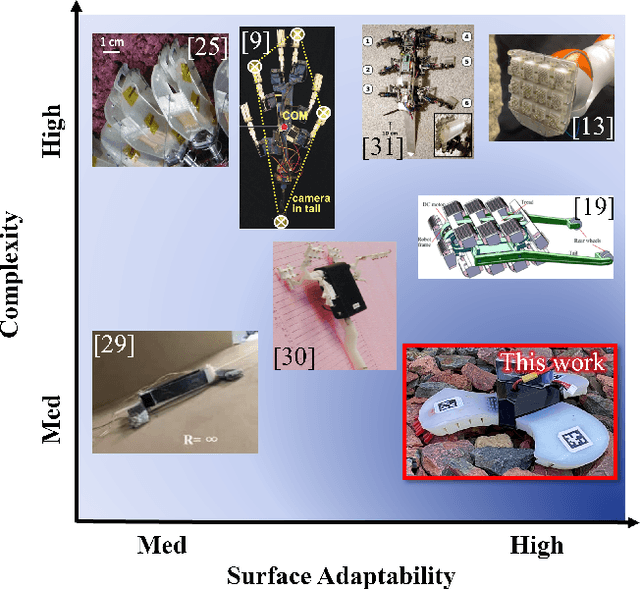

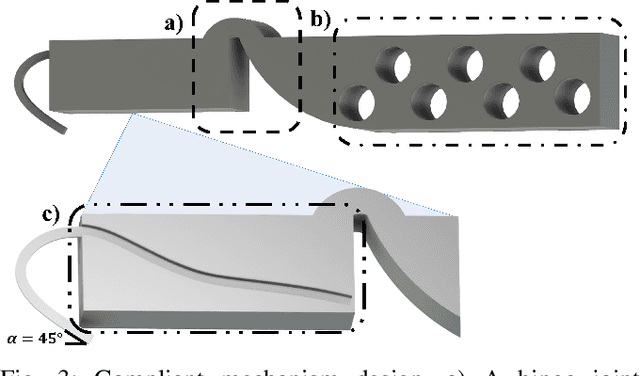
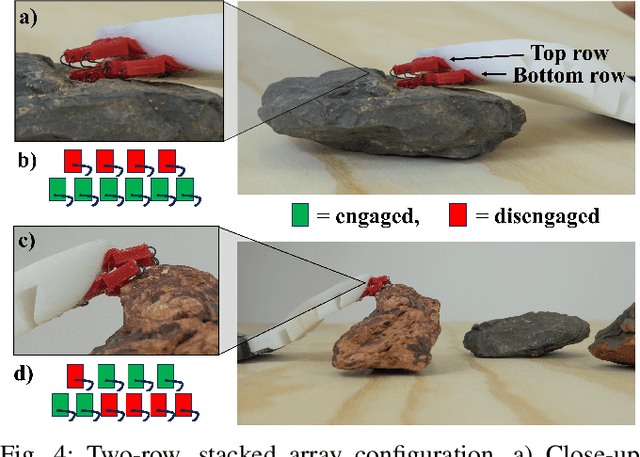
Microspine grippers are small spines commonly found on insect legs that reinforce surface interaction by engaging with asperities to increase shear force and traction. An array of such microspines, when integrated into the limbs or undercarriage of a robot, can provide the ability to maneuver uneven terrains, traverse inclines, and even climb walls. Conformability and adaptability of soft robots makes them ideal candidates for these applications involving traversal of complex, unstructured terrains. However, there remains a real-life realization gap for soft locomotors pertaining to their transition from controlled lab environment to the field by improving grip stability through effective integration of microspines. We propose a passive, compliant microspine stacked array design to enhance the locomotion capabilities of mobile soft robots, in our case, ones that are motor tendon actuated. We offer a standardized microspine array integration method with effective soft-compliant stiffness integration, and reduced complexity resulting from a single actuator passively controlling them. The presented design utilizes a two-row, stacked microspine array configuration that offers additional gripping capabilities on extremely steep/irregular surfaces from the top row while not hindering the effectiveness of the more frequently active bottom row. We explore different configurations of the microspine array to account for changing surface topologies and enable independent, adaptable gripping of asperities per microspine. Field test experiments are conducted on various rough surfaces including concrete, brick, compact sand, and tree roots with three robots consisting of a baseline without microspines compared against two robots with different combinations of microspine arrays. Tracking results indicate that the inclusion of microspine arrays increases planar displacement on average by 15 and 8 times.
Geometric Static Modeling Framework for Piecewise-Continuous Curved-Link Multi Point-of-Contact Tensegrity Robots
Jul 02, 2024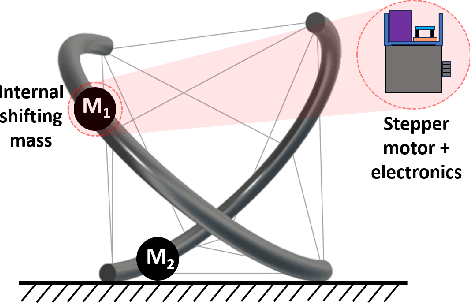
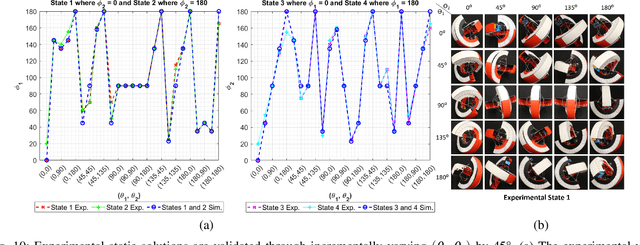
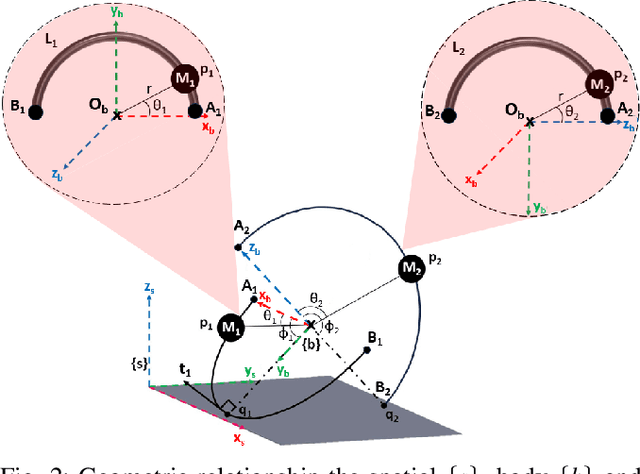
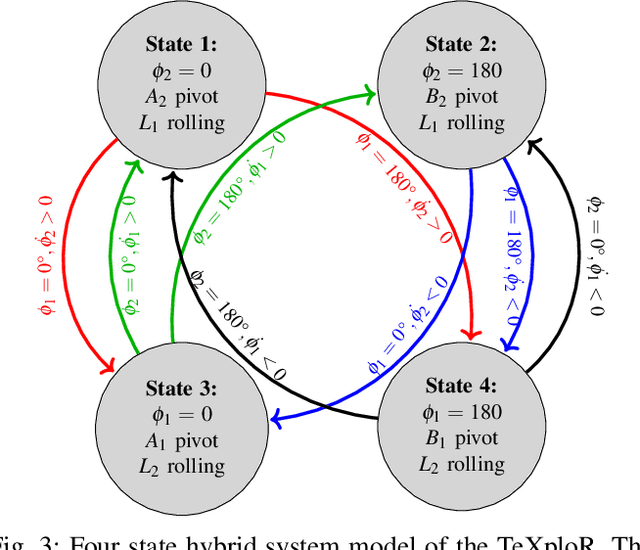
Tensegrities synergistically combine tensile (cable) and rigid (link) elements to achieve structural integrity, making them lightweight, packable, and impact resistant. Consequently, they have high potential for locomotion in unstructured environments. This research presents geometric modeling of a Tensegrity eXploratory Robot (TeXploR) comprised of two semi-circular, curved links held together by 12 prestressed cables and actuated with an internal mass shifting along each link. This design allows for efficient rolling with stability (e.g., tip-over on an incline). However, the unique design poses static and dynamic modeling challenges given the discontinuous nature of the semi-circular, curved links, two changing points of contact with the surface plane, and instantaneous movement of the masses along the links. The robot is modeled using a geometric approach where the holonomic constraints confirm the experimentally observed four-state hybrid system, proving TeXploR rolls along one link while pivoting about the end of the other. It also identifies the quasi-static state transition boundaries that enable a continuous change in the robot states via internal mass shifting. This is the first time in literature a non-spherical two-point contact system is kinematically and geometrically modeled. Furthermore, the static solutions are closed-form and do not require numerical exploration of the solution. The MATLAB simulations are experimentally validated on a tetherless prototype with mean absolute error of 4.36{\deg}.