 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Static Modeling Framework for Piecewise-Continuous Curved-Link Multi Point-of-Contact Tensegrity Robots
Paper and Code
Jul 02, 2024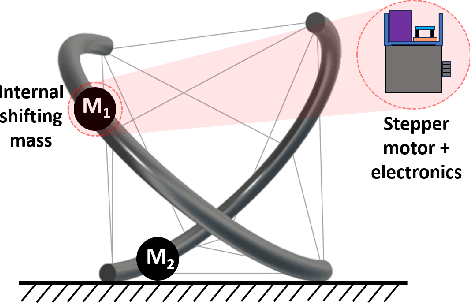
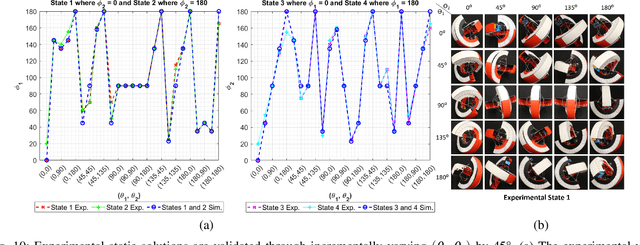
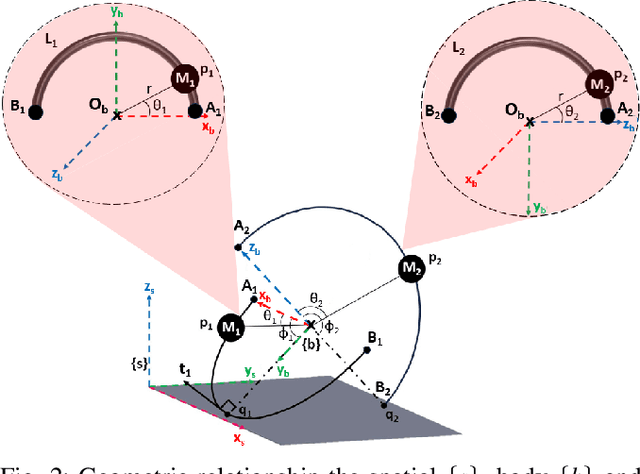
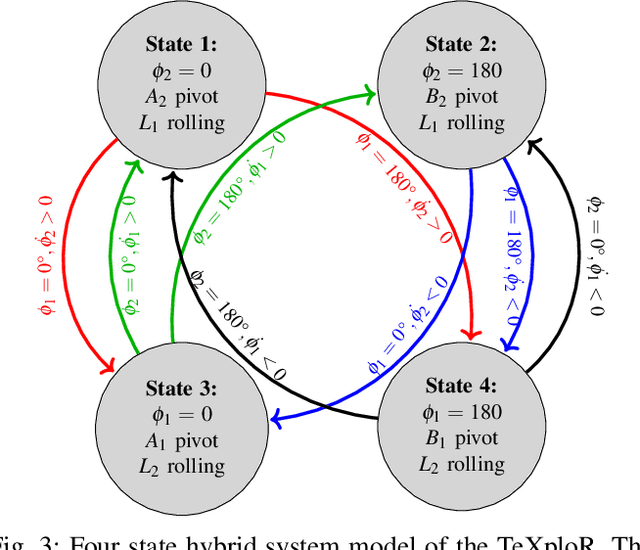
Tensegrities synergistically combine tensile (cable) and rigid (link) elements to achieve structural integrity, making them lightweight, packable, and impact resistant. Consequently, they have high potential for locomotion in unstructured environments. This research presents geometric modeling of a Tensegrity eXploratory Robot (TeXploR) comprised of two semi-circular, curved links held together by 12 prestressed cables and actuated with an internal mass shifting along each link. This design allows for efficient rolling with stability (e.g., tip-over on an incline). However, the unique design poses static and dynamic modeling challenges given the discontinuous nature of the semi-circular, curved links, two changing points of contact with the surface plane, and instantaneous movement of the masses along the links. The robot is modeled using a geometric approach where the holonomic constraints confirm the experimentally observed four-state hybrid system, proving TeXploR rolls along one link while pivoting about the end of the other. It also identifies the quasi-static state transition boundaries that enable a continuous change in the robot states via internal mass shifting. This is the first time in literature a non-spherical two-point contact system is kinematically and geometrically modeled. Furthermore, the static solutions are closed-form and do not require numerical exploration of the solution. The MATLAB simulations are experimentally validated on a tetherless prototype with mean absolute error of 4.36{\deg}.