 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-gait Locomotion Planning and Tracking for Tendon-actuated Terrestrial Soft Robot (TerreSoRo)
Jul 31, 2023



The adaptability of soft robots makes them ideal candidates to maneuver through unstructured environments. However, locomotion challenges arise due to complexities in modeling the body mechanics, actuation, and robot-environment dynamics. These factors contribute to the gap between their potential and actual autonomous field deployment. A closed-loop path planning framework for soft robot locomotion is critical to close the real-world realization gap. This paper presents a generic path planning framework applied to TerreSoRo (Tetra-Limb Terrestrial Soft Robot) with pose feedback. It employs a gait-based, lattice trajectory planner to facilitate navigation in the presence of obstacles. The locomotion gaits are synthesized using a data-driven optimization approach that allows for learning from the environment. The trajectory planner employs a greedy breadth-first search strategy to obtain a collision-free trajectory. The synthesized trajectory is a sequence of rotate-then-translate gait pairs. The control architecture integrates high-level and low-level controllers with real-time localization (using an overhead webcam). TerreSoRo successfully navigates environments with obstacles where path re-planning is performed. To best of our knowledge, this is the first instance of real-time, closed-loop path planning of a non-pneumatic soft robot.
In-Place Rotation for Enhancing Snake-like Robot Mobility
Mar 09, 2022
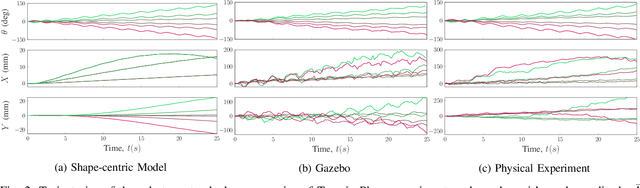

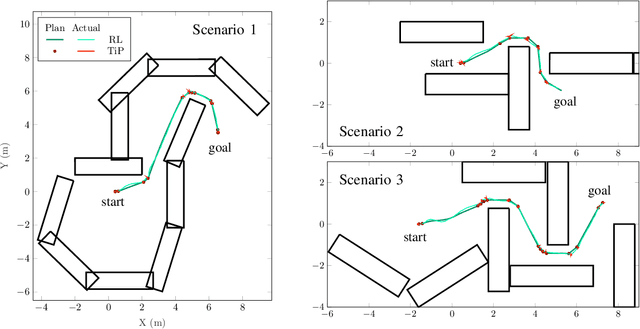
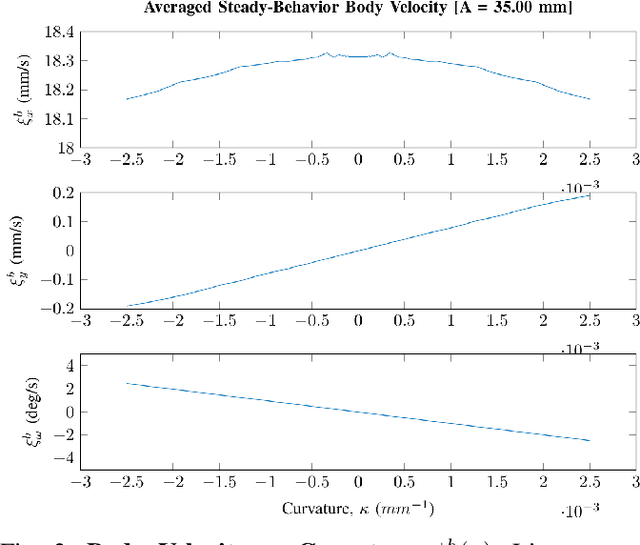
Gaits engineered for snake-like robots to rotate in-place instrumentally fill a gap in the set of locomotive gaits that have traditionally prioritized translation. This paper designs a Turn-in-Place gait and demonstrates the ability of a shape-centric modeling framework to capture the gait's locomotive properties. Shape modeling for turning involves a time-varying continuous body curve described by a standing wave. Presumed viscous robot-ground frictional interactions lead to body dynamics conditioned on the time-varying shape model. The dynamic equations describing the Turn-in-Place gait are validated by an articulated snake-like robot using a physics-based simulator and a physical robot. The results affirm the shape-centric modeling framework's capacity to model a variety of snake-like robot gaits with fundamentally different body-ground contact patterns. As an applied demonstration, example locomotion scenarios partner the shape-centric Turn-in-Place gait with a Rectilinear gait for maneuvering through constrained environments based on a multi-modal locomotive planning strategy. Unified shape-centric modeling facilitates trajectory planning and tracking for a snake-like robot to successfully negotiate non-trivial obstacle configurations.
Autonomous, Monocular, Vision-Based Snake Robot Navigation and Traversal of Cluttered Environments using Rectilinear Gait Motion
Aug 19, 2019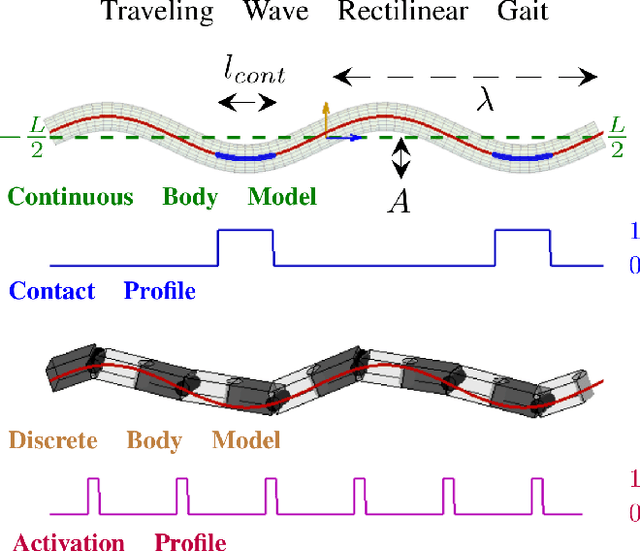
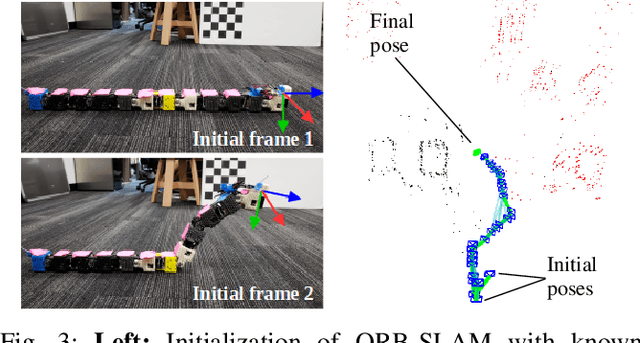

Rectilinear forms of snake-like robotic locomotion are anticipated to be an advantage in obstacle-strewn scenarios characterizing urban disaster zones, subterranean collapses, and other natural environments. The elongated, laterally-narrow footprint associated with these motion strategies is well-suited to traversal of confined spaces and narrow pathways. Navigation and path planning in the absence of global sensing, however, remains a pivotal challenge to be addressed prior to practical deployment of these robotic mechanisms. Several challenges related to visual processing and localization need to be resolved to to enable navigation. As a first pass in this direction, we equip a wireless, monocular color camera to the head of a robotic snake. Visiual odometry and mapping from ORB-SLAM permits self-localization in planar, obstacle-strewn environments. Ground plane traversability segmentation in conjunction with perception-space collision detection permits path planning for navigation. A previously presented dynamical reduction of rectilinear snake locomotion to a non-holonomic kinematic vehicle informs both SLAM and planning. The simplified motion model is then applied to track planned trajectories through an obstacle configuration. This navigational framework enables a snake-like robotic platform to autonomously navigate and traverse unknown scenarios with only monocular vision.