 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Gap-based Planning in Dynamic Settings
Sep 08, 2025This chapter extends the family of perception-informed gap-based local planners to dynamic environments. Existing perception-informed local planners that operate in dynamic environments often rely on emergent or empirical robustness for collision avoidance as opposed to performing formal analysis of dynamic obstacles. This proposed planner, dynamic gap, explicitly addresses dynamic obstacles through several steps in the planning pipeline. First, polar regions of free space known as gaps are tracked and their dynamics are estimated in order to understand how the local environment evolves over time. Then, at planning time, gaps are propagated into the future through novel gap propagation algorithms to understand what regions are feasible for passage. Lastly, pursuit guidance theory is leveraged to generate local trajectories that are provably collision-free under ideal conditions. Additionally, obstacle-centric ungap processing is performed in situations where no gaps exist to robustify the overall planning framework. A set of gap-based planners are benchmarked against a series of classical and learned motion planners in dynamic environments, and dynamic gap is shown to outperform all other baselines in all environments. Furthermore, dynamic gap is deployed on a TurtleBot2 platform in several real-world experiments to validate collision avoidance behaviors.
Steppability-informed Quadrupedal Contact Planning through Deep Visual Search Heuristics
Dec 30, 2024



In this work, we introduce a method for predicting environment steppability -- the ability of a legged robot platform to place a foothold at a particular location in the local environment -- in the image space. This novel environment representation captures this critical geometric property of the local terrain while allowing us to exploit the computational benefits of sensing and planning in the image space. We adapt a primitive shapes-based synthetic data generation scheme to create geometrically rich and diverse simulation scenes and extract ground truth semantic information in order to train a steppability model. We then integrate this steppability model into an existing interleaved graph search and trajectory optimization-based footstep planner to demonstrate how this steppability paradigm can inform footstep planning in complex, unknown environments. We analyze the steppability model performance to demonstrate its validity, and we deploy the perception-informed footstep planner both in offline and online settings to experimentally verify planning performance.
Hierarchical Experience-informed Navigation for Multi-modal Quadrupedal Rebar Grid Traversal
Nov 14, 2023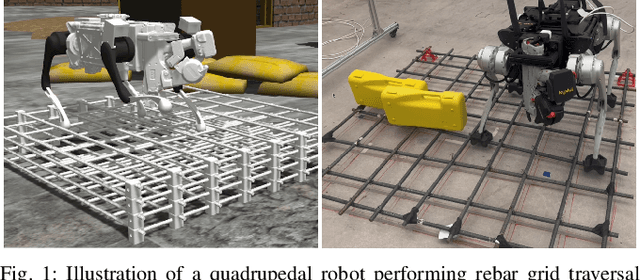
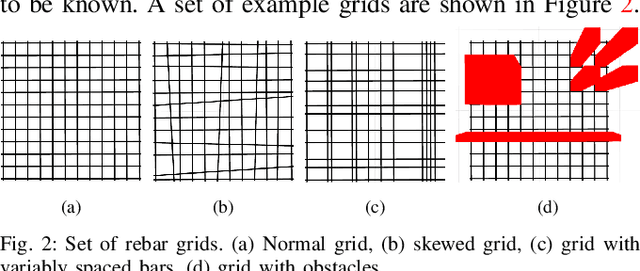
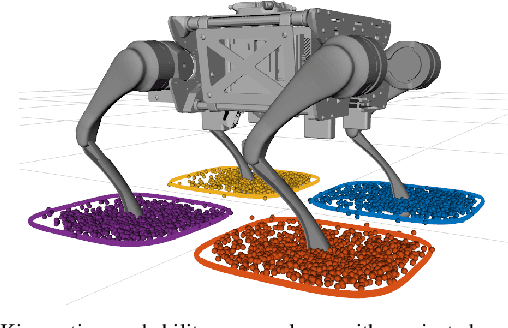
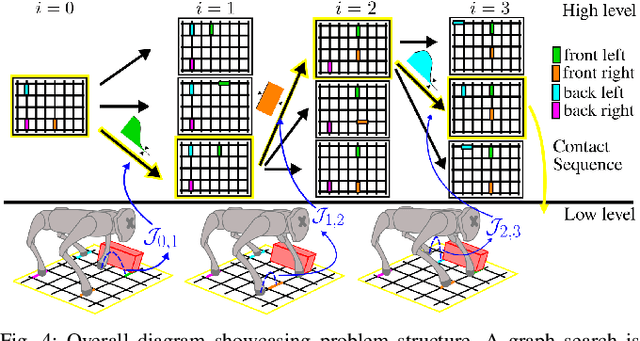
This study focuses on a layered, experience-based, multi-modal contact planning framework for agile quadrupedal locomotion over a constrained rebar environment. To this end, our hierarchical planner incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner. Through quantitative analysis of the experience accumulation process and experimental validation of the kinodynamic feasibility of the generated locomotion trajectories, we demonstrate that the experience planning heuristic offers an effective way of providing candidate footholds for a legged contact planner. Additionally, we introduce a guiding torso path heuristic at the global planning level to enhance the navigation success rate in the presence of environmental obstacles. Our results indicate that the torso-path guided experience accumulation requires significantly fewer offline trials to successfully reach the goal compared to regular experience accumulation. Finally, our planning framework is validated in both dynamics simulations and real hardware implementations on a quadrupedal robot provided by Skymul Inc.
Evolutionary Curriculum Training for DRL-Based Navigation Systems
Jun 15, 2023



In recent years, Deep Reinforcement Learning (DRL) has emerged as a promising method for robot collision avoidance. However, such DRL models often come with limitations, such as adapting effectively to structured environments containing various pedestrians. In order to solve this difficulty, previous research has attempted a few approaches, including training an end-to-end solution by integrating a waypoint planner with DRL and developing a multimodal solution to mitigate the drawbacks of the DRL model. However, these approaches have encountered several issues, including slow training times, scalability challenges, and poor coordination among different models. To address these challenges, this paper introduces a novel approach called evolutionary curriculum training to tackle these challenges. The primary goal of evolutionary curriculum training is to evaluate the collision avoidance model's competency in various scenarios and create curricula to enhance its insufficient skills. The paper introduces an innovative evaluation technique to assess the DRL model's performance in navigating structured maps and avoiding dynamic obstacles. Additionally, an evolutionary training environment generates all the curriculum to improve the DRL model's inadequate skills tested in the previous evaluation. We benchmark the performance of our model across five structured environments to validate the hypothesis that this evolutionary training environment leads to a higher success rate and a lower average number of collisions. Further details and results at our project website.
Dynamic Gap: Formal Guarantees for Safe Gap-based Navigation in Dynamic Environments
Oct 10, 2022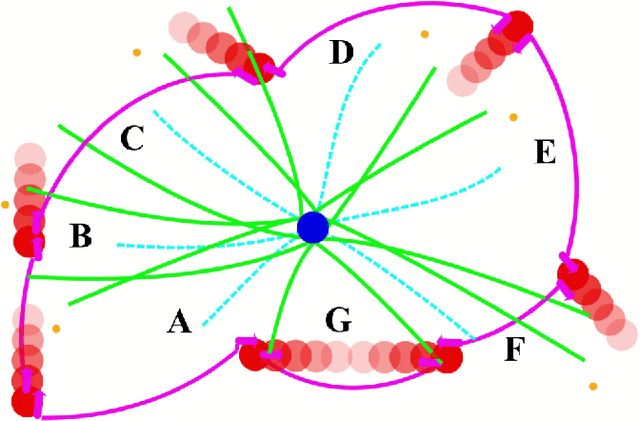
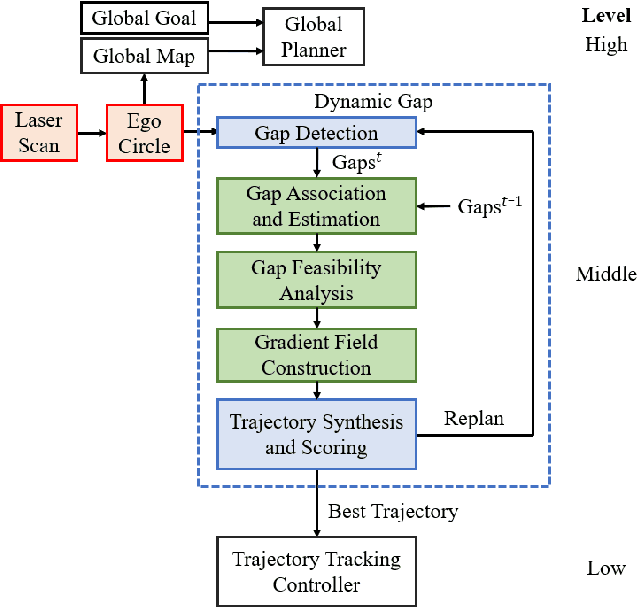
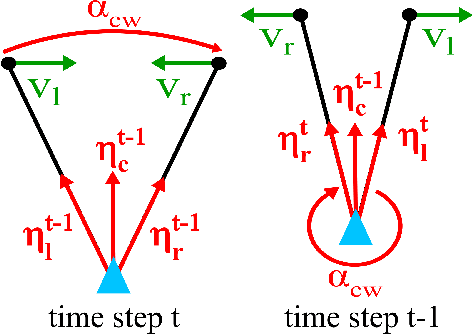
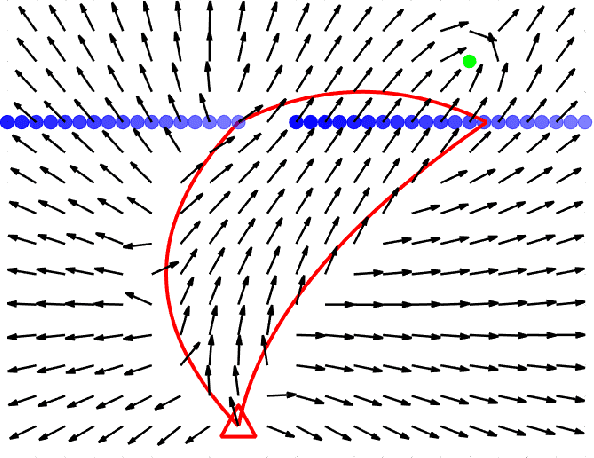
This paper extends the family of gap-based local planners to unknown dynamic environments through generating provable collision-free properties for hierarchical navigation systems. Existing perception-informed local planners that operate in dynamic environments rely on emergent or empirical robustness for collision avoidance as opposed to providing formal guarantees for safety. In addition to this, the obstacle tracking that is performed in these existent planners is often achieved with respect to a global inertial frame, subjecting such tracking estimates to transformation errors from odometry drift. The proposed local planner, called dynamic gap, shifts the tracking paradigm to modeling how the free space, represented as gaps, evolves over time. Gap crossing and closing conditions are developed to aid in determining the feasibility of passage through gaps, and Bezier curves are used to define a safe navigable gap that encapsulates both local environment dynamics and ego-robot reachability. Artificial Harmonic Potential Field (AHPF) methods that guarantee collision-free convergence to the goal are then leveraged to generate safe local trajectories. Monte Carlo benchmarking experiments are run in structured simulation worlds with dynamic agents to showcase the benefits that such formal safety guarantees provide.