 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Gap: Formal Guarantees for Safe Gap-based Navigation in Dynamic Environments
Paper and Code
Oct 10, 2022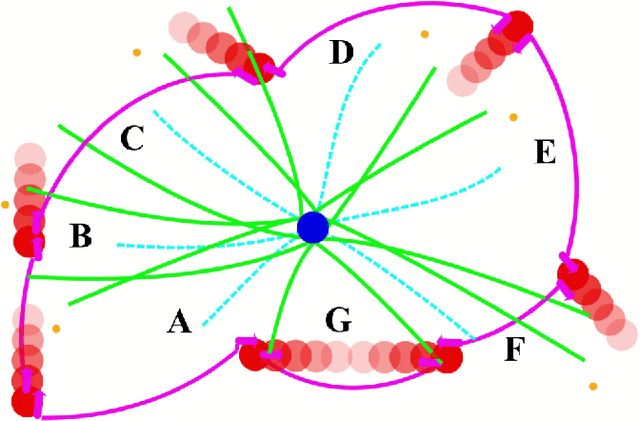
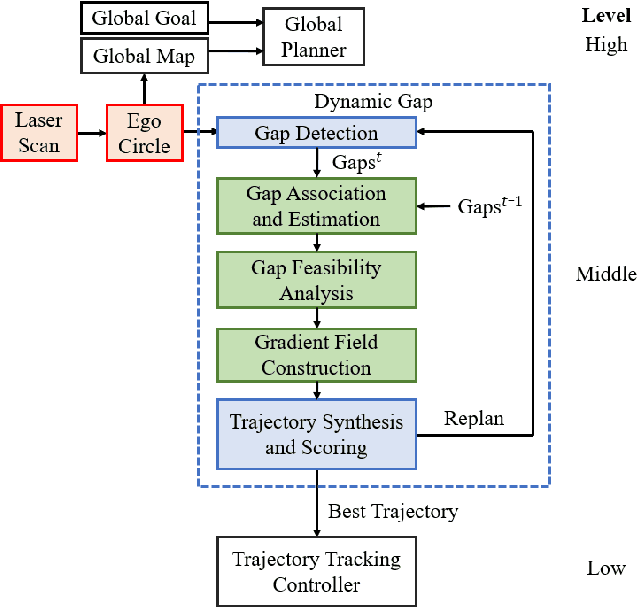
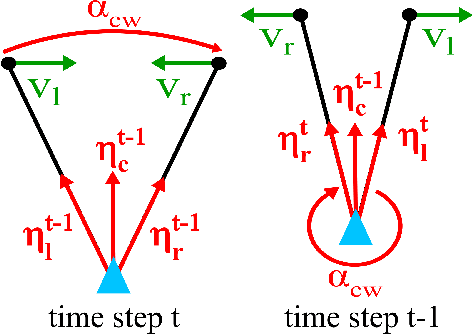
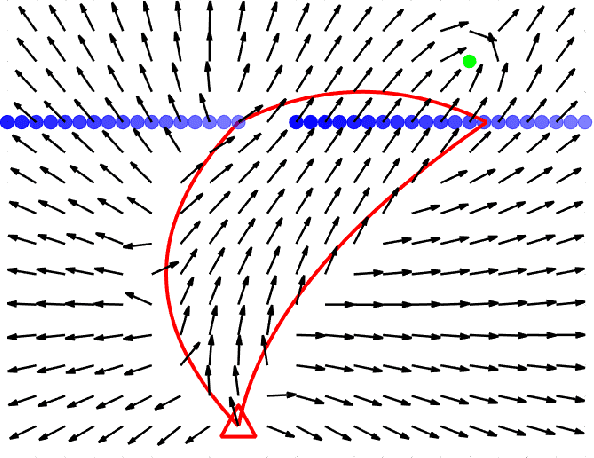
This paper extends the family of gap-based local planners to unknown dynamic environments through generating provable collision-free properties for hierarchical navigation systems. Existing perception-informed local planners that operate in dynamic environments rely on emergent or empirical robustness for collision avoidance as opposed to providing formal guarantees for safety. In addition to this, the obstacle tracking that is performed in these existent planners is often achieved with respect to a global inertial frame, subjecting such tracking estimates to transformation errors from odometry drift. The proposed local planner, called dynamic gap, shifts the tracking paradigm to modeling how the free space, represented as gaps, evolves over time. Gap crossing and closing conditions are developed to aid in determining the feasibility of passage through gaps, and Bezier curves are used to define a safe navigable gap that encapsulates both local environment dynamics and ego-robot reachability. Artificial Harmonic Potential Field (AHPF) methods that guarantee collision-free convergence to the goal are then leveraged to generate safe local trajectories. Monte Carlo benchmarking experiments are run in structured simulation worlds with dynamic agents to showcase the benefits that such formal safety guarantees provide.